1.本发明涉及航空技术领域,尤其涉及一种柔性飞行器飞行半径确定方法。
背景技术:
2.飞行半径是衡量飞机性能的重要指标。对于飞行器而言,飞行半径计算精度与飞行器重量、载油量等因素有关。精确的飞行半径计算,是飞行性能评估和任务规划的重要环节。在设计之初由于缺乏完整详尽的计算分析数据,需要对飞行器对飞行器起飞前,需要精确估算全航线航程,以便计算飞行器的飞行时间、机动突防距离等战术参量;飞行中,导航系统必须实时精确的计算当前飞行航程,才能保证任务剖面的正确性和时效性。
3.目前,在作战半径计算时,往往受限于飞行力学建模对象的刚体假设等因素,对于具有一定柔性的飞行器(如运输机、大展弦比无人机)而言,以此为基础的作战半径计算往往产生较大误差。因此本发明提供了一种计算快捷简单,满足一定精度要求的柔性飞行器飞行半径计算方法。该方法无需专业性能软件或与仿真软件所用的大量原始数据。
技术实现要素:
4.有鉴于此,本发明提供了一种柔性飞行器飞行半径确定方法,包括如下步骤:
5.s1:建立发动机燃油消耗率与平均高度、平均速度、发动机推力、发动机设定工作状态的多元线性回归模型,即为发动机燃油消耗率模型;
6.发动机推力与高度、飞行马赫数、发动机设定工作状态的线性回归模型,即为发动机推力模型;
7.一般情况下,发动机工作状态可以分为慢车状态、加力状态和中间推力状态。数据可由实际飞行试验测得,也可由发动机模拟试验测得,一般为离散的数据点,需要进行多元线性回归。
8.s2:根据高度,建立温度、声速、压力、大气密度的数学模型;
9.s3:根据建立考虑柔性影响修正的升力系数模型,根据公式其中η
i
为i阶弹性模态,为弹性模态对应的升力增量。确定飞行器升力系数,并修正飞行器极曲线的气动数据,用于校正后续计算过程。
10.s4:根据已知飞行器起飞重量、停机角、起飞机场高度、温度、离地迎角和跑道摩擦系数,计算起飞耗油量。起飞耗油量包括起飞前暖机耗油量和起飞滑跑耗油量;具体步骤为:
11.s41.根据起飞暖机时间和发动机暖机耗油率,计算起飞暖机耗油;根据起飞机场高度,代入大气密度的数学模型,修正大气密度。
12.s42.根据设置的离地迎角和飞行器的升力系数曲线,求得离地升力系数,进而由飞行器极曲线求得离地阻力系数。
13.s43.迭代计算飞行器离地速度与发动机离地推力。方法如下:计算飞行器离地速
度。通过发动机推力模型,求得发动机离地推力。进而更新得到新的离地速度。若两次计算的离地速度满足误差范围,结果为飞行器离地速度,若不满足误差范围,则用新的离地速度通过发动机推力模型,迭代求解,直至满足误差范围。
14.s44.根据起飞滑跑过程发动机设定的工作状态、起飞机场高度、飞行器初始速度、发动机初始推力,求得起飞初始耗油率。根据起飞滑跑过程发动机设定的工作状态、起飞机场高度、飞行器离地速度、发动机离地推力,求得起飞离地耗油率。计算起飞时间其中g为当地重力加速度,f为跑道摩擦系数,为离地升阻比,g
takeoff
为飞行器起飞重量,t0为初始推力,t
qf
为起飞离地推力,v
ld
为离地速度。取初始耗油率和起飞离地耗油率的平均值作为起飞过程耗油率,结合起飞时间,计算得到起飞耗油量。
15.s5:根据场高等条件,计算爬升至任务剖面规定巡航高度所需爬升高度,估算爬升过程耗油量,分为加速爬升和等速爬升两个阶段,分别对应加速爬升耗油量和等速爬升耗油量;具体步骤为:
16.s51.确定起飞爬升初始重量、爬升开始高度和爬升终点高度。一般的,爬升开始速度为飞行器起飞离地速度,爬升终点高度为飞行器巡航速度,爬升开始高度为机场高度,爬升终点高度为飞行器出航巡航高度。
17.s52.根据爬升高度和爬升起止速度,将爬升段平均分为n段进行计算。根据每段爬升的平均高度,代入大气密度与声速数学模型,修正该段高度的大气密度、声速。
18.s53.迭代计算每段爬升的飞行器速度、马赫数、爬升速度、飞行器重量、耗油量。计算该爬升段飞行器升力系数,并通过飞机极曲线求得对应阻力系数。由马赫数、该爬升段平均高度和发动机工作状态,代入所述发动机推力模型,得到发动机推力。根据该段发动机设定的工作状态、飞行速度、发动机推力和平均高度,计算燃油消耗率。计算动能变化修正系数爬升速度该段爬升时间该爬升段燃油消耗量w
i
=sfc
i
*dt,该爬升段水平距离,其中v
i
为计算段飞行速度,dv为计算段速度变化量,dh为计算段高度变化量,g
ps
为爬升段重量,t
i
为爬升段推力,d
i
为爬升段阻力,sfc
i
为计算段燃油消耗率。更新飞行器速度、马赫数、爬升速度、飞行器重量,进行下一段爬升耗油量计算。
19.s54.累加每一段爬升的耗油量,得爬升段耗油量,累加每一段爬升的水平距离,得到爬升段水平距离。
20.额外的,如爬升段有发动机加力工作情况,需按照发动机加力工作状态,则需要计算给定加力时长、飞行器高度、飞行器推力的发动机耗油量,累加到爬升段总耗油量中。
21.s6:根据任务剖面规定,结合发动机工作状态、任务要求推力、飞行高度和飞行速度,结合s1所述发动机燃油消耗率模型,结合巡逻、作战等任务段时间,计算任务段耗油量;
22.s7:出航巡航计算。确定飞行器安全着陆余油,根据前述计算的起飞耗油量、爬升过程耗油量、任务段耗油量,确定巡航可用余油,并以巡航可用余油的一半确定出航可用油量;由巡航段所需推力、设定巡航速度、设定巡航高度推算巡航耗油率。具体步骤如下:
23.s71.将计算段油量分为n个计算段,确定出航巡航开始前飞行器重量,根据出航巡航段高度,修正出航巡航段马赫数、大气密度、大气压力,求得动压。
24.s72.确定出航巡航段的计算段发动机设定的工作状态、飞行器升力系数,由飞行器极曲线得到阻力系数、飞行器升阻比。结合发动机推力损失计算巡航所需推力。
25.s73.根据该巡航段发动机设定的工作状态、飞行速度、发动机推力和平均高度,计算燃油消耗率,计算段航程其中sfc
i
为计算段燃油消耗率,dw为计算段燃油消耗量,v为巡航速度。更新飞行器重量,进行下一计算段巡航耗油量计算。
26.s74.累加每一段的航程,得到出航巡航距离。
27.特别的,计算段数量n的确定由飞行器设计航程确定,一般航程越远,所设置n的值越大。当飞行器有额外挂载时,第s72步的飞行器阻力系数需要增加飞行器挂载的阻力系数增量。第s73步,由计算段耗油量和耗油率,累加可以计算得到航时,同时也可以根据计算段航程与耗油量,得到单位航程耗油量,进行远航速度计算。
28.s8:根据具体任务需要,确定飞行器返航构型、返航巡航高度,修正飞机返航重量、马赫数、大气密度、大气压力和升阻力系数,结合s1所述发动机燃油消耗率模型,计算方法同s7所述出航巡航计算,最终得到返航巡航距离;
29.s9:出航巡航距离与返航巡航距离比较,若误差较大,则适当增加或减少出航油量,迭代计算。若误差合理,则爬升水平距离与出/返航距离累加得作战半径。
附图说明
30.图1为本发明的流程图;
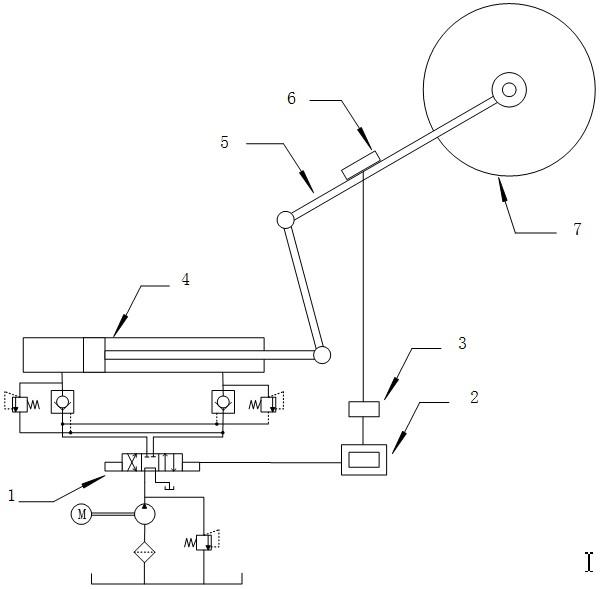
31.图2为本发明实施例中的大展弦比固定翼无人机作战半径示意图。
具体实施方式
32.下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整的描述,显然,所描述的实施方式仅仅是作为例示,并非用于限制本发明。
33.下面通过一个具体的实施例对本发明提供的上述柔性飞行器飞行半径计算方法的具体实施进行详细说明。
34.实施例1为某大展弦比柔性飞行器飞行半径计算:
35.如图1所示,包括如下步骤:
36.s1:建立发动机燃油消耗率与平均高度、平均速度、发动机推力、发动机设定工作状态的多元线性回归模型,即为发动机燃油消耗率模型;
37.发动机推力与高度、飞行马赫数、发动机设定工作状态的线性回归模型,即为发动机推力模型;
38.所述发动机燃油消耗率模型表示为:
39.sfc=f(h,v,t,state)
40.发动机推力模型表示为:
41.t=t(h,ma,state)
42.其中h为发动机/飞行器平均高度,v为飞行器平均速度,ma为飞行器飞行马赫数,t
为发动机推力,state为发动机工作状态,一般情况下,发动机工作状态可以分为慢车状态、加力状态和中间推力状态。数据可由实际飞行试验测得,也可由发动机模拟试验测得,一般为离散的数据点,需要进行多元线性回归。
43.s2:根据气压高度,建立温度、声速、压力、大气密度的数学模型;所述计算数学模型,分别如下:
44.温度:
[0045][0046]
声速:
[0047][0048]
压力:
[0049][0050]
大气密度:
[0051][0052]
s3:根据建立考虑柔性影响修正的升力系数模型,根据公式其中η
i
为i阶弹性模态,为弹性模态对应的升力增量。确定并修正飞行器升力系数,修正飞行器气动数据,用于校正后续计算过程。
[0053]
s4:根据已知飞行器起飞重量、停机角、起飞机场高度、温度、离地迎角和跑道摩擦系数,计算起飞耗油量。起飞耗油量w
qf
包括起飞前暖机耗油量w0和起飞滑跑耗油量w
hp
;具体步骤为:
[0054]
s41.根据起飞暖机时间t0和发动机暖机耗油率sfc0,计算起飞暖机耗油w0=t0*sfc0;根据起飞机场高度,修正大气密度ρ。
[0055]
s42.根据设置的离地迎角和飞行器的升力系数曲线,求得离地升力系数c
yld
,进而由极曲线求得离地阻力系数c
xld
。
[0056]
s43.迭代计算飞行器离地速度v
ld
与发动机离地推力t
ld
。方法如下:计算飞行器离
地速度其中g
takeoff
为飞行器器起飞重量。根据该方法求得的离地速度,通过发动机推力模型,求得发动机离地推力t
ld0
。进而更新得到其中α
ld
为离地迎角。若v
ld0
与v
ld1
满足误差范围,则v
ld1
即为飞行器离地速度,若v
ld0
与v
ld1
,不满足误差范围,则令v
ld0
=v
ld1
,通过发动机推力模型,迭代求解,直至v
ld0
与v
ld1
满足误差范围,求得飞行器离地速度。
[0057]
s44.计算起飞耗油量。步骤如下:发动机初始推力其中a为停机角。根据起飞滑跑过程发动机设定的工作状态、起飞机场高度、飞行器初始速度、发动机初始推力,求得起飞初始耗油率sfc
qf0
。根据起飞滑跑过程发动机设定的工作状态、起飞机场高度、飞行器离地速度、发动机离地推力,求得起飞离地耗油率sfc
qf
。起飞时间其中g为当地重力加速度,f为跑道摩擦系数,为离地升阻比。起飞滑跑耗油量所以起飞耗油量w
qf
=w0 w
hp
。
[0058]
s5:根据场高等条件,计算爬升至任务剖面规定巡航高度所需爬升高度,估算爬升过程耗油量w
ps
,分为加速爬升和等速爬升两个阶段,分别对应加速爬升耗油量和等速爬升耗油量;具体步骤为:
[0059]
s51.确定起飞爬升初始重量g
ps
=g
takeoff
‑
w
qf
,确定爬升开始高度v
i
和爬升终点高度v
f
。爬升高度h
ps
=h
i
‑
h
f
,其中根据爬升初始高度h
i
和爬升终点高度h
f
。一般的,爬升开始速度为飞行器起飞离地速度,爬升终点高度为飞行器巡航速度,爬升开始高度为机场高度,爬升终点高度为飞行器出航巡航高度。
[0060]
s52.根据爬升高度和爬升起止速度,将爬升段平均分为n段进行计算。根据每段爬升的平均高度,修正该段高度的大气密度、声速。计算辅助变量,升的平均高度,修正该段高度的大气密度、声速。计算辅助变量,
[0061]
s53.迭代计算每段爬升的飞行器速度、马赫数、爬升速度、飞行器重量、耗油量。由计算该爬升段飞行器升力系数,并通过飞机极曲线求得对应阻力系数。由马赫数、该爬升段平均高度和发动机工作状态,代入s1所述发动机推力模型,得到发动机推力t
i
。计算动能变化修正系数爬升速度该段爬升时间
根据该段发动机设定的工作状态、飞行速度、发动机推力和平均高度,计算燃油消耗率sfc
i
。该段燃油消耗量w
i
=sfc
i
*dt。该爬升段水平距离l
i
=v
i
cosθ
i
dt,其中更新飞行器速度、马赫数、爬升速度、飞行器重量,进行下一段爬升耗油量计算。
[0062]
s54.累加每一段爬升的耗油量,得爬升段耗油量
[0063]
额外的,如爬升段有发动机加力工作情况,需按照发动机加力工作状态,则需要计算给定加力时长、飞行器高度、飞行器推力的发动机耗油量,累加到爬升段总耗油量中。
[0064]
s6:根据任务剖面规定,结合发动机工作状态、任务要求推力、飞行高度和飞行速度,结合s1所述发动机燃油消耗率模型,结合巡逻、作战等任务段时间,计算任务段耗油量;
[0065]
s7:确定飞行器安全着陆余油,根据前述计算的起飞耗油量、爬升过程耗油量、任务段耗油量,确定巡航可用余油w
cruise
,并以巡航可用余油的一半确定出航可用油量w
setout
;由巡航段所需推力、设定巡航速度、设定巡航高度推算巡航耗油率。具体步骤如下:
[0066]
s71.将计算段油量分为n个计算段,得到辅助变量确定出航巡航开始前飞行器重量g
si
,根据出航巡航段高度,修正出航巡航段马赫数s
s
、大气密度ρ、大气压力p,求得动压q=0.7pma2,其中v为飞行器飞行速度。
[0067]
s72.确定出航巡航段的计算段发动机设定的工作状态、飞行器升力系数由飞行器极曲线得到阻力系数c
xi
,飞行器升阻比巡航所需推力其中it为发动机推力损失。
[0068]
s73.根据该巡航段发动机设定的工作状态、飞行速度、发动机推力和平均高度,代入发动机燃油消耗率模型,计算燃油消耗率sfc
i
,计算段航程更新飞行器重量,进行下一计算段巡航耗油量计算。
[0069]
s74.累加每一段的航程,得到出航巡航距离
[0070]
特别的,计算段数量n的确定由飞行器设计航程确定,一般航程越远,所设置n的值越大。当飞行器有额外挂载时,第2步的飞行器阻力系数需要增加飞行器挂载的阻力系数增量。第3步,由计算段耗油量和耗油率,累加可以计算得到航时,同时也可以根据计算段航程与耗油量,得到单位航程耗油量,进行远航速度计算。
[0071]
s8:根据具体任务需要,确定飞行器返航构型、返航巡航高度,修正飞机返航重量、
马赫数、大气密度、大气压力和升阻力系数,结合s1所述发动机燃油消耗率模型,计算方法同s7所述出航巡航计算,最终得到返航巡航距离
[0072]
s9:出航巡航距离与出航巡航距离比较,若误差较大,则适当增加或减少出航油量,迭代计算。若误差合理,则得出作战半径r=l
ps
max{l
sc
,l
rc
}。
[0073]
最终得出飞行半径剖面如图2所示。
[0074]
本发明提供的柔性飞行器飞行半径计算方法,通过对任务剖面不同阶段的计算,基于柔性飞行器飞行动力学理论,对飞行器模型、巡航段耗油率进行修正,进而完成作战半径的计算。本发明中所述的柔性飞行器飞行半径计算方法,无需专业性能软件或仿真软件所用的大量原始数据,计算快捷简单,可实现大展弦比无人机等飞行器的作战半径估算,为解决其总体性能论证、制定作战方案点等问题提供高可靠性数据支撑,具有重要的工程应用价值。
[0075]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。