1.本发明涉及物联网交通管理技术领域,具体涉及一种基于物联网的智慧交通管理方法及系统。
背景技术:
2.目前,智慧交通物联网的应用还停留在通过对道路上的交通堵塞情况进行和实时监测和记录,并将交通堵塞情况实时反馈至各交通管理者,以便于交通管理者及时发布交通信息。
3.可知,现有的交通物联网应用方案,并不能主动及时将道路上的车辆堵塞情况通知给驾驶人,从而导致驾驶人不能及时调整行驶路线,进而导致整个交通网络变得拥堵。
技术实现要素:
4.本发明的主要目的是提供一种基于物联网的智慧交通管理方法及系统,旨在解决现有的交通物联网应用方案,并不能主动及时将道路上的车辆堵塞情况通知给驾驶人的问题。
5.本发明提出的技术方案为:
6.一种基于物联网的智慧交通管理方法,应用于基于物联网的智慧交通管理系统;所述系统包括云服务器、设置于车辆内的交互终端和设置于各路段的摄像头;所述交互终端和所述摄像头均与所述云服务器通信连接;所述方法,包括:
7.所述摄像头实时拍摄各路段的车辆通行画面,并将所述车辆通行画面发送至所述云服务器;
8.所述云服务器对所述车辆通行画面逐帧进行图像分析,以判断各路段是否出现拥堵情况;
9.若是,将出现拥堵情况的路段标记为拥堵路段;
10.向即将驶向所述拥堵路段的车辆的所述交互终端发送提醒信息。
11.优选的,所述向即将驶向所述拥堵路段的车辆的所述交互终端发送提醒信息,包括:
12.所述交互终端实时采集当前车辆的地理位置,并将所述地理位置实时发送至所述云服务器;
13.所述云服务器基于各所述交互终端发送的所述地理位置,将位于所述拥堵路段方圆第一预设公里内的车辆标记为目标车辆;
14.向所述目标车辆的所述交互终端发送所述提醒信息。
15.优选的,所述交互终端具有声音采集功能;所述云服务器基于各所述交互终端发送的所述地理位置,将位于所述拥堵路段方圆第一预设公里内的车辆标记为目标车辆,之后还包括:
16.将所述目标车辆内设置的所述交互终端标记为目标终端;
17.所述目标终端通过声音采集的方式获取所述目标车辆内人员的行驶目的地,并将所述行驶目的地发送至所述云服务器;
18.所述云服务器将同一所述交互终端发送的所述地理位置和所述行驶目的地建立对应关系;
19.所述云服务器基于所述行驶目的地和对应的所述地理位置,以生成总路程从小至大排列的至少3条通向所述行驶目的地的第一行驶路径;
20.所述云服务器判断各所述第一行驶路径中是否均途径所述拥堵路段;
21.若是,所述云服务器将总路程最短的所述第一行驶路径标记为第一推荐路径,并将所述第一推荐路径发送至对应的所述目标终端;
22.若否,所述云服务器将不途径所述拥堵路段的且总路程最短的所述第一行驶路径标记为第二推荐路径,并将所述第二推荐路径发送至对应的所述目标终端;
23.所述目标终端将所述第一推荐路径或所述第二推荐路径向车辆内的人员进行反馈。
24.优选的,所述交互终端具有语音播报和图像显示功能;所述目标终端将所述第一推荐路径或所述第二推荐路径向车辆内的人员进行反馈,包括:
25.所述交互终端通过图像显示的方式来显示所述第一推荐路径或所述第二推荐路径;
26.当所述交互终端接收到了所述第一推荐路径时,所述交互终端通过语音播报的方式来提醒车辆内的人员:本次行驶必然经过拥堵路段;
27.当所述交互终端接收到了所述第二推荐路径时,所述交互终端通过语音播报的方式来提醒车辆内的人员:注意避开拥堵路段。
28.优选的,所述云服务器将同一所述交互终端发送的所述地理位置和所述行驶目的地建立对应关系,之后还还包括:
29.所述云服务器判断是否出现方圆第二预设公里的范围内存在超过预设数量的所述行驶目的地的现象;
30.若是,将存在于所述方圆第二预设公里的范围内的所有的所述行驶目的地标记为待分析目的地;
31.所述云服务器将所述待分析目的地对应的所述目标车辆标记为待分析车辆;
32.所述云服务器将所述待分析车辆分成第一车辆组、第二车辆组和第三车辆组,其中,所述第一车辆组、所述第二车辆组和所述第三车辆组中任一两组的车辆数的差别不大于1;
33.所述云服务器基于所述第一车辆组内的所述待分析车辆对应的所述待分析目的地和所述地理位置,生成总路程最短的通向所述待分析目的地的且不途径所述拥堵路段的第二行驶路径,并基于所述第二车辆组内的所述待分析车辆对应的所述待分析目的地和所述地理位置,生成总路程最短的通向所述待分析目的地的且不途径所述拥堵路段的第三行驶路径,并基于所述第三车辆组内的所述待分析车辆对应的所述待分析目的地和所述地理位置,生成总路程最短的通向所述待分析目的地的且不途径所述拥堵路段的第四行驶路径,其中,所述第二行驶路径、所述第三行驶路径和所述第四行驶路径彼此之间的路段重合率不超过第一预设值;
34.所述云服务器将所述第一行驶路径发送至对应的所述待分析车辆的所述交互终端,并将所述第二行驶路径发送至对应的所述待分析车辆的所述交互终端,并将所述第三行驶路径发送至对应的所述待分析车辆的所述交互终端;
35.接收到所述第一行驶路径的所述交互终端将所述第一行驶路径作为导航路径向车辆内人员进行反馈;
36.接收到所述第二行驶路径的所述交互终端将所述第二行驶路径作为导航路径向车辆内人员进行反馈;
37.接收到所述第三行驶路径的所述交互终端将所述第三行驶路径作为导航路径向车辆内人员进行反馈。
38.优选的,所述交互终端具有图像采集功能和扬声功能;所述方法,还包括:
39.所述交互终端实时采集车辆前方的图像,并标记为前方图像;
40.所述交互终端实时采集车辆内驾驶员的图像,并标记为驾驶员图像;
41.所述交互终端对所述前方图像进行图像分析,以判断所述前方图像中是否出现交通信号红灯;
42.若是,所述交互终端将所前方图像开始出现交通信号红灯的时刻标记为起始时刻;
43.所述交互终端将所述起始时刻后开始出现交通信号黄灯的时刻标记为目标时刻;
44.所述交互终端对所述驾驶员图像进行图像分析,以判断自所述目标时刻后的第一预设时间段内,车辆内的驾驶员的视角是否一直未朝向车辆前方;
45.若是,所述交互终端发出第一提示音。
46.优选的,所述交互终端具有声音采集功能和速度采集功能;所述交互终端包括用于监测车辆的方向盘的转动角度的角度传感器、设置于车辆方向盘的握力传感器;所述方法,还包括:
47.所述交互终端获取当前时间,并基于所述当前时间生成时间因数y
t
,其中,当所述当前时间落入预设时间区间时,所述时间因数y
t
取1,当所述当前时间不落入所述预设时间区间时,所述时间因数y
t
取0;
48.所述交互终端对当前时刻的前第二预设时间段内的所述驾驶员图像进行图像分析,以获取驾驶员在当前时刻的前所述第二预设时间段内头部位移量s
t
,并基于所述第二预设时间段生成标准头部位移量s
b
;
49.所述交互终端通过所述角度传感器获取车辆在当前时刻的前所述第二预设时间段内的方向盘的累计转动角度j
l
,并基于所述第二预设时间段生成标准转动角度j
b
;
50.所述交互终端通过所述握力传感器获取车辆在当前时刻的前所述第二预设时间段内的驾驶员握住方向盘的握力小于预设握力的次数c
w
;
51.所述交互终端对当前时刻的前所述第二预设时间段内的所述驾驶员图像进行图像分析,以获取驾驶员在当前时刻的前所述第二预设时间段内打哈欠的次数c
h
;
52.所述交互终端实时采集车辆内副驾人员的图像,并标记为副驾图像;
53.所述交互终端对当前时刻的前所述第二预设时间段内的所述副驾图像进行图像分析,以判断在当前时刻的前所述第二预设时间段内车辆内是否存在副驾人员;
54.若是,所述交互终端生成副驾常数a,且所述副驾常数a取0,并对车辆内的副驾区
域进行声音采集,以判断在当前时刻的前所述第二预设时间段内车辆内的副驾人员发出声音的次数c
y
,并基于所述第二预设时间段生成第一标准次数c1;
55.若否,所述交互终端生成副驾常数a,且所述副驾常数a取1;
56.所述交互终端通过实时采集车辆前方的路况图像,并实时分析车辆的行驶速度,以判断在当前时刻的前所述第二预设时间段内车辆是否出现了非必要刹车情况;
57.若是,所述交互终端生成刹车常数b,且所述刹车常数b取10;
58.若否,所述交互终端生成刹车常数b,且所述刹车常数b取0;
59.所述交互终端生成疲劳驾驶指示值z:
[0060][0061]
其中,所述疲劳驾驶指示值z越大,说明驾驶员正在疲劳驾驶的概率越大;
[0062]
当所述疲劳驾驶指示值大于第二预设值时,所述交互终端发出第二提示音。
[0063]
优选的,还包括:
[0064]
所述交互终端获取本车辆与最近的前车之间的实时距离;
[0065]
所述交互终端获取本车辆对应的安全距离值;
[0066]
当所述实时距离小于所述安全距离值时,所述交互终端发出第三提示音。
[0067]
优选的,所述交互终端具有图像采集功能、声音采集功能和速度采集功能;所述交互终端获取本车辆对应的安全距离值,包括:
[0068]
所述交互终端实时采集车辆内驾驶员的图像,并标记为驾驶员图像;
[0069]
所述交互终端对当前时刻的前第三预设时间段内的所述驾驶员图像进行图像分析,以获取驾驶员在当前时刻的前所述第三预设时间段内看手机的次数c
k
,并基于所述第三预设时间段生成第二标准次数c2;
[0070]
所述交互终端通过所述云服务器和交管大数据采集本车辆自当前时刻的前所述第三预设时间段内出现交通事故的次数c
s
,并基于所述第三预设时间段生成第三标准次数c3;
[0071]
所述交互终端对当前时刻的前所述第三预设时间段内的本车辆的行驶速度进行分析,以获取本车辆出现急刹车和急加速的总次数c
z
,并基于所述第三预设时间段生成第四标准次数c4;
[0072]
所述交互终端通过图像采集功能和速度采集功能,获取当前时刻的前所述第三预设时间段内,本车辆在最近的前车亮起刹车尾灯后,至本车辆出现速度骤降的时间间隔的平均值t
j
,并获取标准平均值t
b
;
[0073]
所述交互终端生成本车辆对应的安全距离值d:
[0074][0075]
其中,d1为标准距离值,单位为米,取常数。
[0076]
本发明还提出一种基于物联网的智慧交通管理系统,本系统应用于如上述中任一
项所述的基于物联网的智慧交通管理方法;所述系统包括云服务器、设置于车辆内的交互终端和设置于各路段的摄像头;所述交互终端和所述摄像头均与所述云服务器通信连接。
[0077]
通过上述技术方案,能实现以下有益效果:
[0078]
本发明提出的基于物联网的智慧交通管理方法,通过分布于交通道路网络各处的摄像头来实时采集车辆通行画面,云服务器根据这些车辆通行画面来实时获取拥堵路段,最后再将向即将驶向拥堵路段的车辆的交互终端发送提醒信息,从而达到主动及时将道路上的车辆堵塞情况通知给驾驶人,以便于驾驶人及时调整行驶路线,从而缓解交通网络的拥堵。
附图说明
[0079]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
[0080]
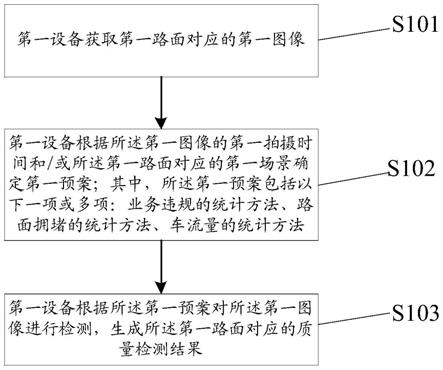
图1为本发明提出的一种基于物联网的智慧交通管理方法第一实施例的流程图。
具体实施方式
[0081]
应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0082]
本发明提出一种基于物联网的智慧交通管理方法及系统。
[0083]
如附图1所示,在本发明提出的一种基于物联网的智慧交通管理方法的第一实施例中,本实施例应用于基于物联网的智慧交通管理系统;所述系统包括云服务器、设置于车辆内的交互终端和设置于各路段的摄像头;所述交互终端和所述摄像头均与所述云服务器通信连接;本实施例包括如下步骤:
[0084]
步骤s110:所述摄像头实时拍摄各路段的车辆通行画面,并将所述车辆通行画面发送至所述云服务器。
[0085]
具体的,这里的车辆通行画面即是用于反馈道路拥堵情况的画面。
[0086]
步骤s120:所述云服务器对所述车辆通行画面逐帧进行图像分析,以判断各路段是否出现拥堵情况。
[0087]
具体的,这里的拥堵情况是指车辆的平均行驶速度低于5公里每小时。
[0088]
若是,执行步骤s130:将出现拥堵情况的路段标记为拥堵路段。
[0089]
具体的,云服务器将出现拥堵情况的路段标记为拥堵路段。
[0090]
步骤s140:向即将驶向所述拥堵路段的车辆的所述交互终端发送提醒信息。
[0091]
具体的,这里的即将驶向拥堵路段的车辆是指可能会驶向拥堵路段的车辆,包括车辆的当前行驶路径包括了拥堵路段的情况;云服务器向即将驶向所述拥堵路段的车辆的所述交互终端发送提醒信息。这里的提醒信息可以是语音播放的形式来提醒车辆内人员前方路段出现拥堵。
[0092]
本发明提出的基于物联网的智慧交通管理方法,通过分布于交通道路网络各处的摄像头来实时采集车辆通行画面,云服务器根据这些车辆通行画面来实时获取拥堵路段,最后再将向即将驶向拥堵路段的车辆的交互终端发送提醒信息,从而达到主动及时将道路
上的车辆堵塞情况通知给驾驶人,以便于驾驶人及时调整行驶路线,从而缓解交通网络的拥堵。
[0093]
在本发明提出的一种基于物联网的智慧交通管理方法的第二实施例中,基于第一实施例,步骤s140,包括如下步骤:
[0094]
步骤s210:所述交互终端实时采集当前车辆的地理位置,并将所述地理位置实时发送至所述云服务器。
[0095]
具体的,这里的地理位置即是车辆当前所处的位置。
[0096]
步骤s220:所述云服务器基于各所述交互终端发送的所述地理位置,将位于所述拥堵路段方圆第一预设公里内的车辆标记为目标车辆。
[0097]
具体的,这里的第一预设公里为5公里。也就说是,这里目标车辆即是第一实施例中的即将驶向拥堵路段的车辆,即将驶向拥堵路段的车辆为拥堵路段方圆5公里内的车辆,
[0098]
步骤s230:向所述目标车辆的所述交互终端发送所述提醒信息。
[0099]
具体的,云服务器向所述目标车辆的所述交互终端发送所述提醒信息。本实施例的目的在于给出了如何确定即将驶向拥堵路段的车辆的方案。
[0100]
在本发明提出的一种基于物联网的智慧交通管理方法的第三实施例中,基于第二实施例,所述交互终端具有声音采集功能;步骤s220,之后还包括如下步骤:
[0101]
步骤s310:将所述目标车辆内设置的所述交互终端标记为目标终端。
[0102]
具体的,云服务器将所述目标车辆内设置的所述交互终端标记为目标终端。
[0103]
步骤s320:所述目标终端通过声音采集的方式获取所述目标车辆内人员的行驶目的地,并将所述行驶目的地发送至所述云服务器。
[0104]
具体的,即目标车辆内的人员通过口述目的地的方式,来使得目标终端获取目标车辆内人员的行驶目的地。
[0105]
步骤s330:所述云服务器将同一所述交互终端发送的所述地理位置和所述行驶目的地建立对应关系。
[0106]
步骤s340:所述云服务器基于所述行驶目的地和对应的所述地理位置,以生成总路程从小至大排列的至少3条通向所述行驶目的地的第一行驶路径。
[0107]
具体的,即云服务器针对每个车辆的行驶目的地和对应的当前地理位置,生成总路程从小至大排列的至少3条(本实施例中优选为3条)通向行驶目的地的第一行驶路径,这里的第一行驶路径即是目标车辆导航的备选路径。
[0108]
步骤s350:所述云服务器判断各所述第一行驶路径中是否均途径所述拥堵路段。
[0109]
若是,执行步骤s360:所述云服务器将总路程最短的所述第一行驶路径标记为第一推荐路径,并将所述第一推荐路径发送至对应的所述目标终端。
[0110]
具体的,若是,说明3条第一行驶路径均会途径拥堵路段,为此,直接将3条第一行驶路径中总路程最短的第一行驶路径作为第一提交路径,并发送至对应的目标终端。
[0111]
若否,执行步骤s370:所述云服务器将不途径所述拥堵路段的且总路程最短的所述第一行驶路径标记为第二推荐路径,并将所述第二推荐路径发送至对应的所述目标终端。
[0112]
具体的,若否,说明3条第一行驶路径中至少存在一条不途径拥堵路段的第一行驶路径,故将不途径拥堵路段的且总路程最短的第一行驶路径标记为第二推荐路径,并将第
二途径路径发送至对应的目标终端。
[0113]
步骤s380:所述目标终端将所述第一推荐路径或所述第二推荐路径向车辆内的人员进行反馈。
[0114]
具体的,目标终端将第一推荐路径或第二推荐路径向车辆内的人员进行反馈,以给车辆内的人员提供行驶导航。本实施例的目的,在于给目标车辆内的人员提供适宜的导航行驶路径。
[0115]
在本发明提出的一种基于物联网的智慧交通管理方法的第四实施例中,基于第三实施例,所述交互终端具有语音播报和图像显示功能;步骤s380,包括如下步骤:
[0116]
步骤s410:所述交互终端通过图像显示的方式来显示所述第一推荐路径或所述第二推荐路径。
[0117]
具体的,通过图像显示的方式来显示第一推荐路径或第二推荐路径,以给车辆内的人员提供导航服务。
[0118]
步骤s420:当所述交互终端接收到了所述第一推荐路径时,所述交互终端通过语音播报的方式来提醒车辆内的人员:本次行驶必然经过拥堵路段。
[0119]
具体的,因第一推荐路径必然经过拥堵路段,故需要及时提醒车辆内的人员:本次行驶必然经过拥堵路段,以避免车辆内人员胡乱寻找其他路径,反而延长了行驶时长。
[0120]
步骤s430:当所述交互终端接收到了所述第二推荐路径时,所述交互终端通过语音播报的方式来提醒车辆内的人员:注意避开拥堵路段。
[0121]
具体的,因第二推荐路径不经过拥堵路段,故提醒车辆内的人员:注意避开拥堵路段,以保证快速到达目的地。本实施例的目的,在于给出了对目标车辆内的人员进行导航的具体方案。
[0122]
在本发明提出的一种基于物联网的智慧交通管理方法的第五实施例中,基于第三实施例,步骤s330,之后还还包括如下步骤:
[0123]
步骤s510:所述云服务器判断是否出现方圆第二预设公里的范围内存在超过预设数量的所述行驶目的地的现象。
[0124]
具体的,这里的第二预设公里优选为1公里,预设数量为100;即出现了方圆1公里内存在超过100个行驶目的地,这种现象极其容易导致出现拥堵,故需要对这些行驶目的地的车辆进行分流导航。
[0125]
若是,执行步骤s520:将存在于所述方圆第二预设公里的范围内的所有的所述行驶目的地标记为待分析目的地。
[0126]
具体的,这里待分析目的地即是存在与方圆1公里内且数量超过100个的行驶目的地。
[0127]
步骤s530:所述云服务器将所述待分析目的地对应的所述目标车辆标记为待分析车辆。
[0128]
具体的,待分析目的地对应的目标车辆为待分析车辆。
[0129]
步骤s540:所述云服务器将所述待分析车辆分成第一车辆组、第二车辆组和第三车辆组,其中,所述第一车辆组、所述第二车辆组和所述第三车辆组中任一两组的车辆数的差别不大于1。
[0130]
具体的,本步骤的目的是将待分析车辆分成3个组,分别为第一车辆组、第二车辆
组和第三车辆组,这里的第一车辆组、第二车辆组和第三车辆组中任一两组的车辆数的差别不大于1,即3组待分析车辆的车辆数量差别较小,以便于后续步骤中分别对3组车辆发送不同的导航路径,从而避免所有的待分析车辆通过一样的导航路径到达方圆1公里内的各自目的地,从而降低交通出现拥堵的概率。
[0131]
步骤s550:所述云服务器基于所述第一车辆组内的所述待分析车辆对应的所述待分析目的地和所述地理位置,生成总路程最短的通向所述待分析目的地的且不途径所述拥堵路段的第二行驶路径,并基于所述第二车辆组内的所述待分析车辆对应的所述待分析目的地和所述地理位置,生成总路程最短的通向所述待分析目的地的且不途径所述拥堵路段的第三行驶路径,并基于所述第三车辆组内的所述待分析车辆对应的所述待分析目的地和所述地理位置,生成总路程最短的通向所述待分析目的地的且不途径所述拥堵路段的第四行驶路径,其中,所述第二行驶路径、所述第三行驶路径和所述第四行驶路径彼此之间的路段重合率不超过第一预设值。
[0132]
具体的,这里的第一预设值为30%;这里的第二行驶路径、第三行驶路径和第四行驶路径即是彼此路径重合率低于30%的导航路径,且第二行驶路径和第一车辆组对应,第三行驶路径和第二车辆组对应,第四行驶路径和第三车辆组对应,这样的话,不同组的车辆对应的导航路径的重合率低于30%,从而降低3组车辆扎堆于同一路段的概率。
[0133]
步骤s560:所述云服务器将所述第一行驶路径发送至对应的所述待分析车辆的所述交互终端,并将所述第二行驶路径发送至对应的所述待分析车辆的所述交互终端,并将所述第三行驶路径发送至对应的所述待分析车辆的所述交互终端。
[0134]
步骤s570:接收到所述第一行驶路径的所述交互终端将所述第一行驶路径作为导航路径向车辆内人员进行反馈。
[0135]
步骤s580:接收到所述第二行驶路径的所述交互终端将所述第二行驶路径作为导航路径向车辆内人员进行反馈。
[0136]
步骤s590:接收到所述第三行驶路径的所述交互终端将所述第三行驶路径作为导航路径向车辆内人员进行反馈。
[0137]
本实施例的目的,在于针对第二预设公里内存在过多行驶目的地时,对对应的车辆分配重合率低于30%的导航路径,从而避免出现交通拥堵。
[0138]
在本发明提出的一种基于物联网的智慧交通管理方法的第六实施例中,基于第一实施例,所述交互终端具有图像采集功能和扬声功能;本实施例还包括如下步骤:
[0139]
步骤s610:所述交互终端实时采集车辆前方的图像,并标记为前方图像。
[0140]
步骤s620:所述交互终端实时采集车辆内驾驶员的图像,并标记为驾驶员图像。
[0141]
步骤s630:所述交互终端对所述前方图像进行图像分析,以判断所述前方图像中是否出现交通信号红灯。
[0142]
若是,执行步骤s640:所述交互终端将所前方图像开始出现交通信号红灯的时刻标记为起始时刻。
[0143]
步骤s640:所述交互终端将所述起始时刻后开始出现交通信号黄灯的时刻标记为目标时刻。
[0144]
具体的,这里的目标时刻即是自起始时刻后开始出现黄灯的时刻。
[0145]
步骤s650:所述交互终端对所述驾驶员图像进行图像分析,以判断自所述目标时
刻后的第一预设时间段内,车辆内的驾驶员的视角是否一直未朝向车辆前方。
[0146]
这里的第一预设时间段为3秒。
[0147]
若是,执行步骤s660:所述交互终端发出第一提示音。
[0148]
具体的,若是,说明车辆在等红灯时后,在出现黄灯后的3秒内,车辆内的驾驶员的视角一致未朝向车辆前方,即未注意到信号灯已经变为黄灯,说明驾驶员已经走神,为了不耽误本车辆后面的车辆通过交通信号灯,故直接通过交互终端发出第一提示音,这里的第一提示音的内容为提醒驾驶员注意交通信号灯。
[0149]
在本发明提出的一种基于物联网的智慧交通管理方法的第七实施例中,基于第六实施例,所述交互终端具有声音采集功能和速度采集功能;所述交互终端包括用于监测车辆的方向盘的转动角度的角度传感器、设置于车辆方向盘的握力传感器;本实施例还包括如下步骤:
[0150]
步骤s701:所述交互终端获取当前时间,并基于所述当前时间生成时间因数y
t
,其中,当所述当前时间落入预设时间区间时,所述时间因数y
t
取1,当所述当前时间不落入所述预设时间区间时,所述时间因数y
t
取0。
[0151]
具体的,这里的预设时间区间对应夜间的时间区间,例如凌晨12点至早上7点,在此时间区间内驾驶,驾驶员更容易疲劳;故当当前时间落入预设时间区间时,时间因数y
t
取1,当当前时间不落入预设时间区间时,时间因数y
t
取0。
[0152]
步骤s702:所述交互终端对当前时刻的前第二预设时间段内的所述驾驶员图像进行图像分析,以获取驾驶员在当前时刻的前所述第二预设时间段内头部位移量s
t
,并基于所述第二预设时间段生成标准头部位移量s
b
。
[0153]
具体的,本实施例中第二预设时间段为1小时,正常情况下,驾驶员的头部位移量是比较小的,这里的头部位移量s
t
越大,说明驾驶员出现打盹瞌睡情况的次数越多;同时,这里的标准头部位移量s
b
即对应正常驾驶情况下,驾驶员在1小时内的头部位移量。
[0154]
步骤s703:所述交互终端通过所述角度传感器获取车辆在当前时刻的前所述第二预设时间段内的方向盘的累计转动角度j
l
,并基于所述第二预设时间段生成标准转动角度j
b
。
[0155]
具体的,当驾驶员正常驾驶时,对应的累计转动角度j
l
应该是稳定的,而当驾驶员出现疲劳瞌睡情况时,这里的累计转动角度j
l
会偏小;同时,这里的标准转动角度j
b
是驾驶员在正常驾驶情况下,1小时内方向盘的累计角度角度。
[0156]
步骤s704:所述交互终端通过所述握力传感器获取车辆在当前时刻的前所述第二预设时间段内的驾驶员握住方向盘的握力小于预设握力的次数c
w
。
[0157]
具体的,这里的预设握力即是正常驾驶情况下司机握住方向盘的握力值区间的最小值;若小于预设握力,则说明驾驶员出现了手放松的情况,即驾驶员出现了疲劳驾驶的情况;故正常驾驶情况下,这里的次数c
w
应该为0,;而当驾驶员出现疲劳瞌睡情况时,这里的次数c
w
会增加。
[0158]
步骤s705:所述交互终端对当前时刻的前所述第二预设时间段内的所述驾驶员图像进行图像分析,以获取驾驶员在当前时刻的前所述第二预设时间段内打哈欠的次数c
h
。
[0159]
具体的,正常驾驶情况下,这里的打哈欠的次数c
h
应该为0。
[0160]
步骤s706:所述交互终端实时采集车辆内副驾人员的图像,并标记为副驾图像。
[0161]
步骤s707:所述交互终端对当前时刻的前所述第二预设时间段内的所述副驾图像进行图像分析,以判断在当前时刻的前所述第二预设时间段内车辆内是否存在副驾人员。
[0162]
具体的,当存在副驾人员时,因副驾人员和驾驶员的沟通交流,会使得驾驶员不容易出现疲劳驾驶。
[0163]
若是,执行步骤s708:所述交互终端生成副驾常数a,且所述副驾常数a取0,并对车辆内的副驾区域进行声音采集,以判断在当前时刻的前所述第二预设时间段内车辆内的副驾人员发出声音的次数c
y
,并基于所述第二预设时间段生成第一标准次数c1。
[0164]
具体的,若是,这里的发出声音的次数c
y
越大,则说明副驾说的话越多,则驾驶员相应的越不容易出现疲劳驾驶;这里的第一标准次数c1则是在正常驾驶情况下,副驾的人员在1小时内发出声音的平均次数。
[0165]
若否,执行步骤s709:所述交互终端生成副驾常数a,且所述副驾常数a取1。
[0166]
步骤s710:所述交互终端通过实时采集车辆前方的路况图像,并实时分析车辆的行驶速度,以判断在当前时刻的前所述第二预设时间段内车辆是否出现了非必要刹车情况。
[0167]
具体的,这里的非必要刹车情况即是指前方道路并未出现车辆,或车辆位于安全刹车距离之外的情况下,出现的刹车情况;这种非必要刹车情况是驾驶员在出现瞌睡打盹的情况时,出现的突然惊醒的反馈刹车情况,出现了非必要刹车情况,则说明驾驶员正在疲劳驾驶,且疲劳的程度较深。
[0168]
若是,执行步骤s711:所述交互终端生成刹车常数b,且所述刹车常数b取10。
[0169]
若否,执行步骤s712:所述交互终端生成刹车常数b,且所述刹车常数b取0。
[0170]
步骤s713:所述交互终端生成疲劳驾驶指示值z:
[0171][0172]
其中,所述疲劳驾驶指示值z越大,说明驾驶员正在疲劳驾驶的概率越大。
[0173]
步骤s714:当所述疲劳驾驶指示值大于第二预设值时,所述交互终端发出第二提示音。
[0174]
具体的,这里的第二预设值为10,当疲劳驾驶指示值z大于10时,说明驾驶员正在疲劳驾驶,为了安全,交互终端发出第二提示音,这里的第二提示音的内容为提醒驾驶员不要疲劳驾驶。
[0175]
在本发明提出的一种基于物联网的智慧交通管理方法的第八实施例中,基于第一实施例,本实施例还包括如下步骤:
[0176]
步骤s810:所述交互终端获取本车辆与最近的前车之间的实时距离。
[0177]
步骤s820:所述交互终端获取本车辆对应的安全距离值。
[0178]
具体的,这里的安全距离值即是本车辆应该减速或刹车的距离。
[0179]
步骤s830:当所述实时距离小于所述安全距离值时,所述交互终端发出第三提示音。
[0180]
具体的,当实时距离小于安全距离值时,通过交互终端发出第三提示音,以提醒驾
驶员进行减速或刹车操作。
[0181]
在本发明提出的一种基于物联网的智慧交通管理方法的第九实施例中,基于第八实施例,所述交互终端具有图像采集功能、声音采集功能和速度采集功能;所述交互终端获取本车辆对应的安全距离值,包括如下步骤:
[0182]
步骤s910:所述交互终端实时采集车辆内驾驶员的图像,并标记为驾驶员图像。
[0183]
步骤s920:所述交互终端对当前时刻的前第三预设时间段内的所述驾驶员图像进行图像分析,以获取驾驶员在当前时刻的前所述第三预设时间段内看手机的次数c
k
,并基于所述第三预设时间段生成第二标准次数c2。
[0184]
具体的,这里的第三预设时间段为3个月,这里的看手机的次数c
k
越大,说明驾驶员的驾驶专心程度越低,则该驾驶员越容易出现交通安全事故;这里的第二标准次数c2为正常驾驶员在过去3个月内驾驶车辆时查看手机的平均次数,是一个用于衡量c
k
的标准值。
[0185]
步骤s930:所述交互终端通过所述云服务器和交管大数据采集本车辆自当前时刻的前所述第三预设时间段内出现交通事故的次数c
s
,并基于所述第三预设时间段生成第三标准次数c3。
[0186]
具体的,这里的出现交通事故的次数c
s
越大,则该驾驶员越容易出现交通事故;这里的第三标准次数c3为在过去3个月内每个驾驶员出现交通事故的平均次数,是一个用于衡量c
s
的标准值。
[0187]
步骤s940:所述交互终端对当前时刻的前所述第三预设时间段内的本车辆的行驶速度进行分析,以获取本车辆出现急刹车和急加速的总次数c
z
,并基于所述第三预设时间段生成第四标准次数c4。
[0188]
具体的,这里的急刹车和急加速的总次数c
z
越大,说明驾驶员驾驶车辆的风格越急躁,则该驾驶员越容易出现交通事故;这里的第四标准次数c4即是过去3个月内每个驾驶员出现急刹车和急加速的平均次数,是一个用于衡量c
z
的标准值。
[0189]
步骤s950:所述交互终端通过图像采集功能和速度采集功能,获取当前时刻的前所述第三预设时间段内,本车辆在最近的前车亮起刹车尾灯后,至本车辆出现速度骤降的时间间隔的平均值t
j
,并获取标准平均值t
b
。
[0190]
具体的,这里的平均值t
j
即是驾驶员在过去3个月内,每次出现前车刹车情况后,本车反应过来进行减速的时间间隔的平均值,这个平均值t
j
越长,说明驾驶员对应前车刹车的反应时长越长,则该驾驶员越容易出现交通事故;这里的标准平均值t
b
为所有的驾驶员对于出现前车刹车情况后,反应过来进行减速的时间间隔的平均值,是一个用于衡量平均值t
j
的标准值。
[0191]
步骤s960:所述交互终端生成本车辆对应的安全距离值d:
[0192][0193]
其中,d1为标准距离值,单位为米,取常数,本实施例中优选为80米,通过上述公式,能够对每个驾驶员基于自身的驾驶习惯来设置个性化的安全距离值,即驾驶习惯良好的驾驶员,其安全距离值可相对变短;而对于驾驶习惯不好的驾驶员,其安全距离值应该变长,从而实现个性化安全驾驶提醒。
[0194]
本发明还提出一种基于物联网的智慧交通管理系统,本应用于如上述中任一项所
述的基于物联网的智慧交通管理方法;所述系统包括云服务器、设置于车辆内的交互终端和设置于各路段的摄像头;所述交互终端和所述摄像头均与所述云服务器通信连接。
[0195]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
[0196]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,计算机软件产品存储在一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端(可以是手机,计算机,服务器,空调器,或者网络设备等)执行本发明各个实施例所述的方法。
[0197]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。