1.本发明涉及加氢领域,具体涉及一种全自动加氢机器人。
背景技术:
2.随着我国经济的发展和社会的不断进步,汽车已经成为现代人不可或缺的代步工具,氢燃料电池汽车具有环保性能好、转化效率高、加注速度快、续航里程长等优点,是未来汽车发展的新方向,而加氢站是给燃料电池汽车提供氢气的燃气站。
3.现有技术存在以下不足:现有的加氢站在进行加氢的时候一般是通过工作人员进行加氢的,但是这样不仅会提高劳动成本,还会提高劳动强度。
4.因此,发明一种全自动加氢机器人很有必要。
技术实现要素:
5.为此,本发明提供一种全自动加氢机器人,通过数据采集模块和位置传感器对机器人的位置数据进行采集,采集后通过识别模块,确定机器人与汽车加氢口的位置,确定后,通过控制模块对机器人的位置进行调整,从而使加氢枪放入到汽车加氢口中,以解决现有的加氢站在进行加氢的时候一般是通过工作人员进行加氢的问题。
6.为了实现上述目的,本发明提供如下技术方案:一种全自动加氢机器人,包括数据采集模块、位置传感器和地面,所述地面上方设有加氢设备、停车位和机器人,所述加氢设备右侧设有所述机器人,所述机器人右侧设有所述停车位,所述机器人包括盒体;和
7.安装在盒体中端内壁的驱动装置;和
8.安装在盒体底部的前后移动装置;和
9.连接在驱动装置和前后移动装置之间的传动装置一;和
10.连接在盒体顶部的升降装置;和
11.连接在驱动装置和升降装置之间的传动装置二;和
12.连接在升降装置一端的左右移动装置;和
13.连接在驱动装置和左右移动装置之间的传动装置;
14.所述驱动装置包括箱体、转轴一和转轴二,所述箱体内壁插接伺服电机,所述盒体左侧内壁通过轴承连接所述转轴一,所述盒体右侧内壁通过轴承连接所述转轴二,所述伺服电机输出端通过轴承连接所述转轴一,所述转轴一右侧固定安装液压缸一,所述液压缸一输出端通过液压杆固定安装挤压板一;
15.所述前后移动装置包括移动空心板,所述移动空心板内壁通过轴承连接两组转轴五,所述转轴五两端固定安装滚轮;
16.所述升降装置包括往复丝杠一和导杆一,所述盒体顶部呈方形排列固定安装导杆一,所述导杆一顶部固定安装顶板,所述顶板内壁通过轴承连接所述往复丝杠一,所述往复丝杠一一端螺纹连接升降板,所述升降板内壁插接所述导杆一;
17.所述左右移动装置包括往复丝杠二,所述升降板顶部右侧固定安装支撑板,所述
支撑板内壁通过轴承连接所述复丝杠二,所述复丝杠二一端螺纹连接移动板,所述移动板顶部固定安装大液压缸一,所述大液压缸一输出端通过液压杆固定安装连接块,所述连接块顶部固定安装连接板,所述连接板内壁固定安装加氢枪,所述连接板顶部固定安装摄像头,所述往复丝杠二右侧固定安装所述位置传感器。
18.优选的,所述盒体底部固定安装所述移动空心板,所述盒体左侧一端固定安装所述箱体,所述挤压板一位于所述转轴二一侧。
19.优选的,所述地面上方两端设有导轨,所述导轨内壁插接所述滚轮,所述加氢设备一端连接加氢管道,所述加氢管道末端连接加氢枪,所述加氢管道一端连接电磁阀。
20.优选的,所述传动装置一包括皮带轮一和皮带轮二,所述转轴二中端固定安装所述皮带轮二,所述移动空心板左侧内壁通过轴承连接转轴四,所述移动空心板右侧内壁通过轴承连接转轴三,所述转轴三一端固定安装所述皮带轮一,所述转轴五一端固定安装皮带轮四,所述转轴四一端固定安装皮带轮三。
21.优选的,所述皮带轮二通过皮带一连接所述皮带轮一,所述皮带轮三通过皮带二连接所述皮带轮四,所述转轴四右侧固定安装小液压缸,所述小液压缸输出端通过液压杆固定安装小挤压板,所述小挤压板位于所述转轴三一侧。
22.优选的,所述传动装置二包括齿轮一和齿轮二,所述转轴二左侧固定安装齿轮一,所述齿轮一啮合连接所述齿轮二,所述齿轮二内壁固定安装转轴六,所述转轴六顶端通过轴承连接在所述盒体顶端内壁,所述转轴六顶部固定安装液压缸二,所述液压缸二输出端通过液压杆固定安装挤压板二,所述挤压板二位于所述往复丝杠一下方。
23.优选的,所述支撑板一端固定安装导杆二,所述导杆二一端插接在所述移动板内壁。
24.优选的,所述传动装置包括皮带轮五、皮带轮六和皮带轮七,所述转轴二右侧固定安装所述皮带轮五,所述盒体内壁一端固定安装大液压缸二,所述大液压缸二输出端通过液压杆固定安装u形板,所述u形板内壁通过轴承连接转轴七,所述皮带轮六内壁固定安装所述转轴七,所述升降板顶部中端固定安装固定板,所述固定板内壁通过轴承连接转轴八,所述转轴八一端固定安装所述皮带轮七,所述皮带轮五、所述皮带轮六和所述皮带轮七通过皮带三连接。
25.优选的,所述转轴八右侧固定安装液压缸三,所述液压缸三输出端通过液压杆固定安装挤压板三,所述挤压板三位于往复丝杠二一侧。
26.优选的,所述数据采集模块连接储存模块,所述储存模块连接对比模块,所述对比模块连接终端,所述终端连接控制模块,所述控制模块连接机器人,所述位置传感器连接所述终端,所述数据采集模块设置为摄像头。
27.本发明的有益效果是:
28.1.在使用本发明时当驾驶员讲汽车停在停车位上时,并打开加氢口,打开后,通过数据采集模块就会得到汽车加氢口的图片,得到后,对比模块就会将采集到的数据与储存的数据进行对比和分析,从而选出相对应的图片数据,选出后,终端同时会通过位置传感器得到加氢枪的位置,得到后,终端就会通过相对应的图片数据和加氢枪的位置对控制模块进行控制,控制后的控制模块就会对机器人进行控制,首先伺服电机会通过转轴一带动液压缸一进行旋转,同时通过液压缸一使挤压板一对转轴二进行挤压,挤压后,液压缸一通过
挤压板一就会带动转轴二进行旋转,旋转的转轴二就会通过皮带轮二、皮带轮一和皮带一带动转轴三进行旋转,同时转轴二还会通过齿轮一和齿轮二带动转轴六进行旋转,以及旋转的转轴二还会通过皮带轮五、皮带轮六、皮带轮七和皮带三带动转轴八进行旋转,通过使用一个伺服电机实现自动前后移动、自动升降和自动左右移动,不仅具有降低成本的作用,还具有体积小的作用;
29.2.当需要进行前后移动时,通过小液压缸使小挤压板对转轴三进行挤压,从而使转轴三带动转轴四进行旋转,然后转轴四就会通过皮带轮三、皮带轮四和皮带二带动转轴五进行旋转,旋转的转轴五就会带动滚轮进行旋转,从而使加氢枪位于汽车加氢口一侧,当需要升降时,通过液压缸二使挤压板二对往复丝杠一进行挤压,挤压后,液压缸二就会通过挤压板二带动往复丝杠一进行旋转,旋转的往复丝杠一就会带动升降板进行升降,直至加氢枪与汽车加氢口的高度平齐,当需要左右移动时,通过液压缸三使挤压板三对往复丝杠二进行挤压,挤压后,液压缸三就会带动往复丝杠二进行旋转,旋转的往复丝杠二就会带动移动板进行移动,直至移动板移至往复丝杠二右端,然后大液压缸一就会带动连接板进行移动,移动的连接板就会带动加氢枪和摄像头进行移动,移动的摄像头具有对汽车加氢口的位置进行实时采集的作用,然后移动的加氢枪就会插入汽车加氢口中,从而完成加氢,通过自动化进行加氢,不仅节约了劳动成本,还提高了便捷性,以及节约了站内空间;
30.3.通过可以对自动前后移动、自动升降和自动左右移动进行独立控制,具有便于操作的作用。
附图说明
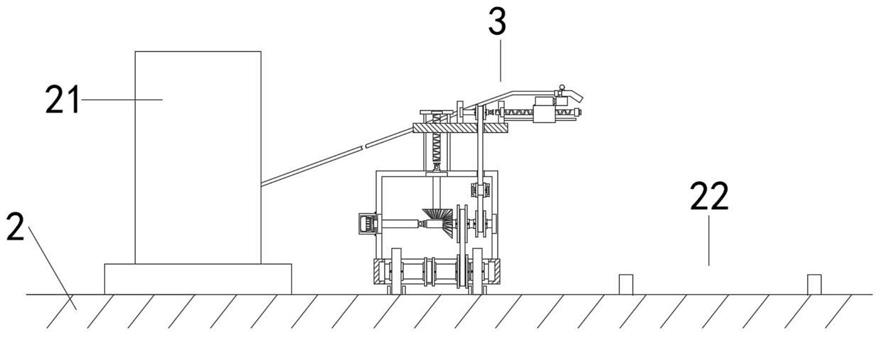
31.图1为本发明提供的整体结构正视示意图;
32.图2为本发明提供的机器人结构正视示意图;
33.图3为本发明提供的机器人结构正视a区域放大示意图;
34.图4为本发明提供的机器人结构正视b区域放大示意图;
35.图5为本发明提供的机器人结构正视c区域放大示意图;
36.图6为本发明提供的机器人结构正视d区域放大示意图;
37.图7为本发明提供的机器人结构正视e区域放大示意图;
38.图8为本发明提供的前后移动装置结构俯视示意图;
39.图9为本发明提供的前后移动装置结构俯视f区域放大示意图;
40.图10为本发明提供的机器人结构侧视示意图;
41.图11为本发明提供的流程示意图。
42.图中:数据采集模块1、储存模块11、对比模块12、终端13、控制模块14、位置传感器15、地面2、加氢设备21、加氢管道211、电磁阀212、加氢枪213、停车位22、机器人3、盒体31、驱动装置4、箱体41、伺服电机42、转轴一43、转轴二44、液压缸一45、挤压板一46、传动装置一5、皮带轮一51、皮带轮二52、皮带一53、转轴三54、转轴四55、皮带轮三56、皮带轮四57、皮带二58、小液压缸59、小挤压板591、前后移动装置6、移动空心板61、转轴五62、滚轮63、导轨64、传动装置二7、齿轮一71、齿轮二72、转轴六73、液压缸二74、挤压板二75、升降装置81、往复丝杠一811、升降板812、顶板813、导杆一814、左右移动装置82、往复丝杠二821、支撑板822、移动板823、导杆二824、大液压缸一825、连接块826、连接板827、摄像头828、传动装置
9、皮带轮五91、大液压缸二92、u形板93、转轴七94、皮带轮六95、皮带轮七96、皮带三97、固定板98、转轴八981、液压缸三99、挤压板三991。
具体实施方式
43.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
44.参照附图1
‑
图11,本发明提供的一种全自动加氢机器人,包括数据采集模块1、位置传感器15和地面2,所述地面2上方设有加氢设备21、停车位22和机器人3,所述加氢设备21右侧设有所述机器人3,所述机器人3右侧设有所述停车位22,所述机器人3包括盒体31;和
45.安装在盒体31中端内壁的驱动装置4;和
46.安装在盒体31底部的前后移动装置6;和
47.连接在驱动装置4和前后移动装置6之间的传动装置一5;和
48.连接在盒体31顶部的升降装置81;和
49.连接在驱动装置4和升降装置81之间的传动装置二7;和
50.连接在升降装置81一端的左右移动装置82;和
51.连接在驱动装置4和左右移动装置82之间的传动装置9;
52.进一步地,所述驱动装置4包括箱体41、转轴一43和转轴二44,所述箱体41内壁插接伺服电机42,所述盒体31左侧内壁通过轴承连接所述转轴一43,所述盒体31右侧内壁通过轴承连接所述转轴二44,所述伺服电机42输出端通过轴承连接所述转轴一43,所述转轴一43右侧固定安装液压缸一45,所述液压缸一45输出端通过液压杆固定安装挤压板一46,具体的,伺服电机42通过转轴一43具有带动液压缸一45进行旋转的作用,液压缸一45具有带动挤压板一46进行伸缩的作用,伸长的挤压板一46具有对转轴二44进行挤压的作用,挤压后,液压缸一45通过挤压板一46具有带动转轴二44进行旋转的作用。
53.进一步地,所述前后移动装置6包括移动空心板61,所述移动空心板61内壁通过轴承连接两组转轴五62,所述转轴五62两端固定安装滚轮63,具体的,旋转的转轴五62具有带动滚轮63进行旋转的作用,旋转的滚轮63具有带动移动空心板61进行移动的作用。
54.进一步地,所述升降装置81包括往复丝杠一811和导杆一814,所述盒体31顶部呈方形排列固定安装导杆一814,所述导杆一814顶部固定安装顶板813,所述顶板813内壁通过轴承连接所述往复丝杠一811,所述往复丝杠一811一端螺纹连接升降板812,所述升降板812内壁插接所述导杆一814,具体的,旋转的往复丝杠一811具有带动升降板812进行升降的作用,往复丝杠是能够在不改变主轴转动方向前提下,使滑块实现往复运动的一种丝杠。
55.进一步地,所述左右移动装置82包括往复丝杠二821,所述升降板812顶部右侧固定安装支撑板822,所述支撑板822内壁通过轴承连接所述复丝杠二821,所述复丝杠二821一端螺纹连接移动板823,所述移动板823顶部固定安装大液压缸一825,所述大液压缸一825输出端通过液压杆固定安装连接块826,所述连接块826顶部固定安装连接板827,所述连接板827内壁固定安装加氢枪213,所述连接板827顶部固定安装摄像头828,所述往复丝杠二821右侧固定安装所述位置传感器15,具体的,旋转的往复丝杠二821具有带动移动板823进行移动的作用,大液压缸一825具有带动连接板827进行移动的作用,连接板827具有
带动加氢枪213和摄像头828进行移动的作用,摄像头828具有采集汽车加氢口的位置作用,移动的加氢枪213具有插入汽车加氢口中的作用。
56.进一步地,所述盒体31底部固定安装所述移动空心板61,所述盒体31左侧一端固定安装所述箱体41,所述挤压板一46位于所述转轴二44一侧。
57.进一步地,所述地面2上方两端设有导轨64,所述导轨64内壁插接所述滚轮63,所述加氢设备21一端连接加氢管道211,所述加氢管道211末端连接加氢枪213,所述加氢管道211一端连接电磁阀212,具体的,导轨64对滚轮63的移动具有导向作用,电磁阀212具有对加氢管道211中的流体流量进行控制的作用。
58.进一步地,所述传动装置一5包括皮带轮一51和皮带轮二52,所述转轴二44中端固定安装所述皮带轮二52,所述移动空心板61左侧内壁通过轴承连接转轴四55,所述移动空心板61右侧内壁通过轴承连接转轴三54,所述转轴三54一端固定安装所述皮带轮一51,所述转轴五62一端固定安装皮带轮四57,所述转轴四55一端固定安装皮带轮三56,具体的,转轴二44通过皮带轮二52、皮带轮一51和皮带一53具有带动转轴三54进行旋转的作用。
59.进一步地,所述皮带轮二52通过皮带一53连接所述皮带轮一51,所述皮带轮三56通过皮带二58连接所述皮带轮四57,所述转轴四55右侧固定安装小液压缸59,所述小液压缸59输出端通过液压杆固定安装小挤压板591,所述小挤压板591位于所述转轴三54一侧,具体的,小液压缸59具有带动小挤压板591进行伸缩的作用,伸长的小挤压板591具有对转轴三54进行挤压的作用,挤压后,转轴三54具有带动转轴四55进行旋转的作用,转轴四55通过皮带轮三56、皮带轮四57和皮带二58具有带动转轴五62进行旋转的作用。
60.进一步地,所述传动装置二7包括齿轮一71和齿轮二72,所述转轴二44左侧固定安装齿轮一71,所述齿轮一71啮合连接所述齿轮二72,所述齿轮二72内壁固定安装转轴六73,所述转轴六73顶端通过轴承连接在所述盒体31顶端内壁,所述转轴六73顶部固定安装液压缸二74,所述液压缸二74输出端通过液压杆固定安装挤压板二75,所述挤压板二75位于所述往复丝杠一811下方,具体的,转轴二44通过齿轮一71和齿轮二72具有带动转轴六73进行旋转的作用,转轴六7具有带动液压缸二74进行旋转的作用,液压缸二74具有带动挤压板二75进行伸缩的作用,伸长的挤压板二75具有对往复丝杠一811进行挤压的作用,挤压后,液压缸二74通过挤压板二75具有带动往复丝杠一811进行旋转的作用。
61.进一步地,所述支撑板822一端固定安装导杆二824,所述导杆二824一端插接在所述移动板823内壁。
62.进一步地,所述传动装置9包括皮带轮五91、皮带轮六95和皮带轮七96,所述转轴二44右侧固定安装所述皮带轮五91,所述盒体31内壁一端固定安装大液压缸二92,所述大液压缸二92输出端通过液压杆固定安装u形板93,所述u形板93内壁通过轴承连接转轴七94,所述皮带轮六95内壁固定安装所述转轴七94,所述升降板812顶部中端固定安装固定板98,所述固定板98内壁通过轴承连接转轴八981,所述转轴八981一端固定安装所述皮带轮七96,所述皮带轮五91、所述皮带轮六95和所述皮带轮七96通过皮带三97连接,具体的,大液压缸二92通过u形板93具有带动皮带轮六95进行伸缩的作用,当升降板812带动皮带轮七96进行升降的时候,通过大液压缸二92带动皮带轮六95进行伸缩,具有使皮带三97始终呈紧绷状态连接在皮带轮五91、皮带轮六95和皮带轮七96上的作用,转轴二44通过皮带轮五91、皮带轮六95、皮带轮七96和皮带三97具有带动转轴八981进行旋转的作用。
63.进一步地,所述转轴八981右侧固定安装液压缸三99,所述液压缸三99输出端通过液压杆固定安装挤压板三991,所述挤压板三991位于往复丝杠二821一侧,具体的,旋转的转轴八981具有带动液压缸三99进行旋转的作用,液压缸三99具有带动挤压板三991进行伸缩的作用,伸长的挤压板三991具有对往复丝杠二821进行挤压的作用,挤压后,液压缸三99具有带动往复丝杠二821进行旋转的作用。
64.进一步地,所述数据采集模块1连接储存模块11,所述储存模块11连接对比模块12,所述对比模块12连接终端13,所述终端13连接控制模块14,所述控制模块14连接机器人3,所述位置传感器15连接所述终端13,所述数据采集模块1设置为摄像头828,具体的,数据采集模块1具有采集汽车加氢口的位置作用,储存模块11具有储存提前备好的汽车加氢口的不同角度的图片作用,对比模块12具有将采集到的数据与储存的数据进行对比和分析的作用,从而选出相对应的图片数据作用,选出后,终端13就会根据选出的相对应的图片数据对控制模块14进行控制的作用,终端13优选为计算机,控制模块14优选为控制器,控制器是由程序计数器、指令寄存器、指令译码器、时序产生器和操作控制器组成,它是发布命令的决策机构,即完成协调和指挥整个计算机系统的操作,控制模块14具有对机器人3进行控制的作用,位置传感器15是用来测量机器人3自身位置的传感器,位置传感器15具有检测机器人3的位置作用。
65.本发明的使用过程如下:在使用本发明时当驾驶员讲汽车停在停车位22上时,并打开加氢口,打开后,通过数据采集模块1就会得到汽车加氢口的图片,得到后,对比模块12就会将采集到的数据与储存的数据进行对比和分析,从而选出相对应的图片数据,选出后,终端13同时会通过位置传感器15得到加氢枪213的位置,得到后,终端13就会通过相对应的图片数据和加氢枪213的位置对控制模块14进行控制,控制后的控制模块14就会对机器人3进行控制,首先伺服电机42会通过转轴一43带动液压缸一45进行旋转,同时通过液压缸一45使挤压板一46对转轴二44进行挤压,挤压后,液压缸一45通过挤压板一46就会带动转轴二44进行旋转,旋转的转轴二44就会通过皮带轮二52、皮带轮一51和皮带一53带动转轴三54进行旋转,同时转轴二44还会通过齿轮一71和齿轮二72带动转轴六73进行旋转,以及旋转的转轴二44还会通过皮带轮五91、皮带轮六95、皮带轮七96和皮带三97带动转轴八981进行旋转,当需要进行前后移动时,通过小液压缸59使小挤压板591对转轴三54进行挤压,从而使转轴三54带动转轴四55进行旋转,然后转轴四55就会通过皮带轮三56、皮带轮四57和皮带二58带动转轴五62进行旋转,旋转的转轴五62就会带动滚轮63进行旋转,从而使加氢枪213位于汽车加氢口一侧,当需要升降时,通过液压缸二74使挤压板二75对往复丝杠一811进行挤压,挤压后,液压缸二74就会通过挤压板二75带动往复丝杠一811进行旋转,旋转的往复丝杠一811就会带动升降板812进行升降,直至加氢枪213与汽车加氢口的高度平齐,当需要左右移动时,通过液压缸三99使挤压板三991对往复丝杠二821进行挤压,挤压后,液压缸三99就会带动往复丝杠二821进行旋转,旋转的往复丝杠二821就会带动移动板823进行移动,直至移动板823移至往复丝杠二821右端,然后大液压缸一825就会带动连接板827进行移动,移动的连接板827就会带动加氢枪213和摄像头828进行移动,移动的摄像头828具有对汽车加氢口的位置进行实时采集的作用,然后移动的加氢枪213就会插入汽车加氢口中,从而完成加氢。
66.以上所述,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上
述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。