1.本发明涉及一种用于餐厨垃圾生物养殖的自动喂料设备及其生产线,属于餐厨垃圾处理技术领域。
背景技术:
2.湿垃圾包括餐厨垃圾和厨余垃圾。而餐厨垃圾主要是公共餐饮服务部门产生的食物残余,其成分复杂,系油、水、果皮、蔬菜、米面、鱼、肉、骨以及废餐具、塑料、纸巾等物质的混合物。餐厨垃圾具有较高的有机物含量和水分(含量为75~85%)。其次,餐厨垃圾具有较高的盐分和油脂含量(3~5%),若不经专门分类处理会对环境造成严重的危害。厨余垃圾为日常生活中产生的垃圾,包括果蔬垃圾、剩菜剩饭、玻璃陶瓷、纸张等,其中易腐类有机物含量低,含油量低,含杂率高,木质纤维素含量高。目前国内厨余垃圾并未做到很好的分类,塑料、织物等无机物含量较高,因此厨余垃圾中可利用的有机质可以通过妥善处理后资源化利用,但陶瓷玻璃等杂质资源利用存在一定的困难,而且在处理过程中容易损伤设备。
3.餐厨垃圾具有高含水率、有机质含量多以及易酸化等特性,每年产生餐厨垃圾不低于6000万吨,目前国内外常用的有机湿垃圾技术如卫生填埋、焚烧、厌氧消化和堆肥等,存在资源化利用效率低、成本高、附加值低、二次污染严重等问题,迫切需要开发出适合我国国情、环保安全、资源化利用率高的生物转化处理工艺。在这种背景下,生物转化技术的优势显得格外突出,在国内外都受到了广泛关注。而通过养殖蝇蛆/黑水虻来处理餐厨垃圾和厨余垃圾,借助生物繁殖的特性,将原本的二次污染物转化成了优质蛋白饲料,代替了以往填埋处理、焚烧处理、高温好氧堆肥处理以及机械预处理 厌氧发酵处理等处理方式该方法,有效拓展了餐厨残渣废弃物处理工艺。
4.在餐厨垃圾作为饲料时,由于餐厨垃圾的成份极其不稳定且水份含量高,因此在加料过程中,加料量无法达到精确控制,尤其针对不同昆虫,进食量不同,不能及时调节加料量会影响养殖效率。其次现有养殖大都以人工和半机械化养殖为主要模式占多数,这种模式适于小规模养殖,无法满足规模化、稳定化生产运行。
技术实现要素:
5.本发明的目的是提供一种加料稳定,适应性强,运行稳定可靠,能实现规模化养殖的用于餐厨垃圾生物养殖的自动喂料设备及其生产线。
6.本发明为达到上述目的的技术方案是:一种用于餐厨垃圾生物养殖的自动喂料设备,其特征在于:包括用于将饲料送至对辊挤压装置内的星形进料机,安装在机架上用于将饲料挤压成片状的对辊给料装置和用于将片状饲料间隔排至生物养殖盒内的导向下料装置,以及用于输送养殖盒的输送装置和喂料plc控制系统;
7.所述的星形进料机上方的进料口与料仓连接相通、下方的出料口与对辊给料装置的进料口连接相通;
8.所述的对辊给料装置包括给料框架、具有进料口的罩壳以及两个压辊和用于驱动
两压辊的压辊驱动机构;所述的罩壳安装在给料框架上并罩在两个压辊上,安装在机架上的给料框架上设有上下对应的导轨,所述两个压辊的两侧的轴段分别通过轴承安装在滑块上,滑块安装在对应的导轨上,调节组件安装在给料框架和各滑块上并用于调节饲料通过两压辊之间的间隙,压辊驱动机构与各压辊的连接用于驱动压辊转动对通过的饲料挤压成片状;
9.所述的导向下料装置位于对辊给料装置的下部,包括导料切断机构和挡料机构,所述的导料切断机构包括断料板、摆臂和断料驱动件,安装在机架上的断料驱动件与摆臂的一端连接,摆臂的另一端安装在机架上并与断料板连接用于驱动断料板沿旋转中心转动,所述断料板转动至竖向时用于对片料进行导向;所述断料板转动至横向时用于对片料进行切断;所述的挡料机构包括安装在机架上的闸座、设置在闸座内可移动的闸板以及闸板驱动件,闸座位于断料板的下部设有给料通道,安装在机架上的闸板驱动件与闸板的一端连接,所述的断料板切断片料时,闸板驱动件带动闸板的关闭闸座上的给料通道;
10.所述的输送装置包括输送支撑架、多个承载滚筒和驱动机构,多个并排的承载滚筒转动安装在输送支撑架上并与驱动机构连接,所述的承载滚筒转动时用于带动养殖盒移动,所述输送支撑架对应于导向下料装置安装有用于检测养殖盒位置的位置传感器及用于对移动的养殖盒停止或继续移动的限位机构;
11.所述喂料plc控制系统用于接受位置传感器监测到养殖箱的初始位置信号,并根据初始位置信号以及存储的运行程序输出信号,分别控制限位机构、压辊驱动机构、断料驱动件和闸板驱动件动作。
12.本发明一种用于餐厨垃圾生物养殖的生产线,其特征在:包括养殖立库以及用于餐厨垃圾生物养殖的自动喂料设备,所述的养殖立库包括用于存放养殖箱的多排立体货架、堆垛机以及搬运小车和养殖plc控制系统,输送装置与立体货架相对应,所述堆垛机设于两排立体货架之间,用于搬运立体货架上的养殖箱;所述搬运小车用于将立体货架内的养殖箱搬出放入输送装置上或将养殖箱从输送装置搬进立体货架上,所述的养殖plc控制系统用于控制堆垛机和搬运小车动作,对养殖箱的生物养殖、存储和出入库作业进行控制和管理。
13.本发明针对餐厨垃圾的成份极其不稳定且水份含量高的特点,通过星形进料机靠将饲料平稳加入至对辊给料装置内,对辊给料装置的两个压辊将饲料挤压成片状形,因此提高了喂料的可靠性和精度,并通过控制养殖堆积饲料的厚度,提升了喂料养殖箱的周转效率。本发明通过的导向下料装置对片状饲料排至养殖箱内,通过导料切断机构在落料时通过断料板对片状饲料的一侧进行限位继而实现导向,在不需喂料时及时对片状饲料进行断料,同时挡料机构尖关闭给料通道,停止落料的动作,能根据餐厨垃圾以及不同昆虫种类精确控制喂料量,将片状饲料堆积在养殖箱的指定位置,有利于生物养殖,通过喂料plc控制系统实现自动化喂料。本发明通过养殖立库对养殖箱进行存储和管理,由养殖plc控制系统对养殖箱存储及入出库作业进行管理,大大提高了仓储效率。本发明的餐厨垃圾生物养殖生产线拓展了餐厨垃圾资源化的应用领域,打通了餐厨垃圾预处理尾端资源化的道路,解决了规模化养殖高效周转与存储的技术难题,为实现有机固废的减量化与资源化做出了重大贡献,随着生物养殖自动化产线的推广与应用也将大大提高公司的市场竞争力。
附图说明
14.下面结合附图对本发明的实施例作进一步的详细描述。
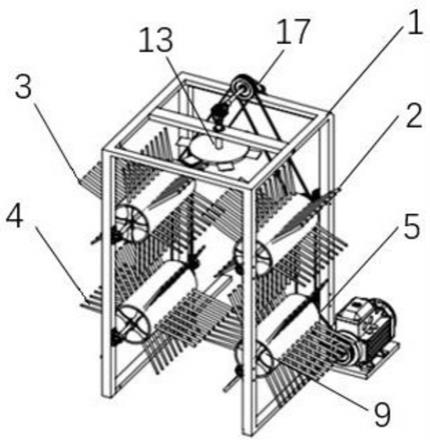
15.图1是本发明用于餐厨垃圾生物养殖的自动喂料设备的立体结构示意图。
16.图2是本发明用于餐厨垃圾生物养殖的自动喂料设备的结构示意图。
17.图3是图2的俯视结构示意图。
18.图4是图2的侧视结构示意图。
19.图5是图3的a
‑
a剖视喂料状态的结构示意图。
20.图6是图3的a
‑
a剖视停止喂料状态的结构示意图。
21.图7是本发明导料切断机构的结构示意图。
22.图8是本发明断料板的结构示意图。
23.图9是图6的i处放大结构示意图。
24.图10是本发明用于餐厨垃圾生物养殖的生产线的结构示意图。
25.其中:1—输送装置,1
‑
1—输送支撑架,1
‑
2—侧限位滚轮,1
‑
3—承载滚筒,1
‑
4—驱动机构,1
‑
5—位置传感器,1
‑
6—限位机构,1
‑
61—限位气缸,1
‑
62—挡板,1
‑
63—导向座,2—养殖箱,3—结构平台,3
‑
1—机架,3
‑
2—栏杆,3
‑
3—一体式爬梯,3
‑
4—斜板,4—对辊给料装置,4
‑
1—电机,4
‑
2—传动带,4
‑
3—给料框架,4
‑
31—导轨,4
‑
4—罩壳,4
‑
5—带轮,4
‑
6—滑块,4
‑
7—压辊,4
‑
8—调节杆,5—进料箱,6—星形进料机,7—导料切断机构,7
‑
1—断料板,7
‑
11—连接板、7
‑
12—弧形板,7
‑
13—转轴,7
‑
2—摆臂,7
‑
3—断料驱动件,8—挡料机构,8
‑
1—闸板驱动件,8
‑
2—闸座,8
‑
3—闸板,9—立体货架。
具体实施方式
26.见图1~6所示,本发明的用于餐厨垃圾生物养殖的自动喂料设备,包括用于将饲料送至对辊挤压装置4内的星形进料机6,安装在机架3
‑
1上用于将饲料挤压成片状的对辊给料装置4和用于将片状饲料间隔排至养殖箱2内的导向下料装置,以及用于输送养殖箱2的输送装置1和喂料plc控制系统。
27.见图1~4所示,本发明机架3
‑
1包括多个横梁和纵梁固定形成的设备框架和固定在设备框架上的多个立柱,栏杆3
‑
2固定在设备框架的周边进行有效防护,一体式爬梯3
‑
3固定在设备框架一侧,对辊给料装置4和导向下料装置安装在设备框架上,花纹钢板固定在设备框架上并构成结构平台3,方便对辊给料装置4和导向下料装置的检修与维护,而输送装置1则设置在设备框架的下部并穿过机架3
‑
1。
28.见图1~6所示,本发明的星形进料机6为现有的设备,星形进料机6上方的进料口与料仓连接相通、下方的出料口与对辊给料装置4的进料口连接相通,星形进料机6上方的进料口和下方的出料口均设有连接法兰,上部的连接法兰与料仓的出料口连接,本发明星形进料机6上部的连接法兰还可与皮带送料机的出料口连接,料仓内的饲料通过皮带送料机送到连接星形进料机6内,星形进料机6的下方的连接法兰与对辊给料装置4的进料口上的法兰连接,通过星形进料机6上的进料电机控制进料叶轮旋转而起着输送饲料的作用,同时进料叶轮起到较好的密封作用,保证定量而连续地的正常供料。
29.见图1~6所示,本发明的对辊给料装置4包括给料框架4
‑
3、具有进料口的罩壳4
‑
4以及两个压辊4
‑
7和用于驱动两压辊4
‑
7的压辊驱动机构,罩壳4
‑
4安装在给料框架4
‑
3上并
罩在两个压辊4
‑
7上,以提高设备的安全性,本发明罩壳4
‑
4的顶部还安装有进料箱5,进料箱5的进料口与星形进料机6的出料口连接相通,实现可靠稳定的加料并使对辊给料装置4具有较大物料容纳空量,确保稳定饲料进入压辊内。
30.见图1~4所示,本发明安装在机架3
‑
1上的给料框架4
‑
3上设有上下对应的导轨4
‑
31,给料框架4
‑
3呈矩形框架,可将罩壳4
‑
4安装在给料框架4
‑
3的顶部以及周边,给料框架4
‑
3上的导轨4
‑
31设有两个并位于两压辊对应的轴段,可沿送料方向平行设置,导轨4
‑
31可采用凸起导块或内凹导槽,两个压辊4
‑
7的两侧的轴段分别通过轴承安装在滑块4
‑
6上,滑块4
‑
6安装在对应的导轨4
‑
31上,压辊驱动机构与各压辊4
‑
7的连接用于驱动压辊4
‑
7转动对通过的饲料挤压成片状。见图1~4所示,本发明压辊驱动机构包括安装机架3
‑
1上的两个电机4
‑
1,两个电机4
‑
1安装在平板上,平板安装在机架3
‑
1上,方便安装和调节。本发明两个电机4
‑
1通过各自的传动带4
‑
2与对应压辊4
‑
7一端轴段上的带轮4
‑
5连接,通过压辊驱动机构带动两压辊4
‑
7转动对通过两压辊4
‑
7之间的饲料进行挤压成片状,本发明可根据养殖箱宽度来调整压辊4
‑
7的长度,并根据饲料含水率、不同昆虫种类的进食量,调整两个压辊4
‑
7之间的间隙,控制饲料的厚度,提高养殖箱内饲料有效堆积量,提升喂料养殖箱的周转效率。
31.见图1~4所示,本发明调节组件安装在给料框架4
‑
3和各滑块4
‑
6上并用于调节饲料通过两压辊4
‑
7之间的间隙,见图1、2所示,本发明调节组件包括调节杆4
‑
8和调节螺母,固定在滑块4
‑
6上的调节杆4
‑
8穿过给料框架4
‑
3的立柱上,旋接在调节杆4
‑
8上的调节螺母顶在立柱上,操作调节螺母方便快捷调节两压辊4
‑
7之间饲料通过的间隙。
32.见图5~7所示,本发明导向下料装置位于对辊给料装置4的下部,包括导料切断机构7和挡料机构8。本发明的导料切断机构7包括断料板7
‑
1、摆臂7
‑
2和断料驱动件7
‑
3,安装在机架3
‑
1上的断料驱动件7
‑
3与摆臂7
‑
2的一端连接,断料驱动件7
‑
3可采用气缸,摆臂7
‑
2另一端安装在机架3
‑
1上并与断料板7
‑
1连接用于驱动断料板7
‑
1沿旋转中心转动。见图5所示,本发明断料板7
‑
1转动至竖向时用于对片料进行导向,而挡住片料的前侧,不会使片料外漏。见图6所示,断料板7
‑
1转动至横向时用于对片料进行切断。见图8所示,本发明断料板7
‑
1包括转轴7
‑
13、固定在转轴7
‑
13上的弧形板7
‑
12,断料板7
‑
1的转轴7
‑
13与摆臂7
‑
2的另一端连接,弧形板7
‑
12的远端具有刃口,机架3
‑
1上固定有与弧形板7
‑
12远端对应的斜板3
‑
4,一方面方便断料,另一方面通过斜板3
‑
4挡住未及时加入养殖箱2内的片料,在给料通道打开后,自动落入养殖箱2内。本发明为使断料板7
‑
1工作更加可靠,转轴7
‑
13在弧形板7
‑
12两侧还套装有连接板7
‑
11,两连接板7
‑
11通过紧固件安装在机架3
‑
1上。
33.见图5~6所示,本发明挡料机构8包括安装在机架3
‑
1上的闸座8
‑
2、设置在闸座8
‑
2内可移动的闸板8
‑
3以及闸板驱动件8
‑
1,闸座8
‑
2位于断料板7
‑
1的下部设有给料通道,该给料通道与断料板7
‑
1对应,安装在机架3
‑
1上的闸板驱动件8
‑
1与闸板8
‑
3的一端连接,断料板7
‑
1切断片料,闸板驱动件8
‑
1带动闸板8
‑
3的关闭给料通道;而断料板7
‑
1对片料导向,闸板驱动件8
‑
1带动闸板8
‑
3的打开给料通道,闸板驱动件8
‑
1可采用气缸,可根据喂料plc控制系统输出的信号动作,并通过控制阀来控制断料驱动件7
‑
3和闸板驱动件8
‑
1动作。
34.见图1~6所示,本发明输送装置1包括输送支撑架1
‑
1、多个承载滚筒1
‑
3和驱动机构1
‑
4,多个并排的承载滚筒1
‑
3转动安装在输送支撑架1
‑
1上并与驱动机构1
‑
4连接,本发明的驱动机构1
‑
4通过电机及链带动传动机构与多个驱动轴连接,继而与承载滚筒1
‑
3连
接,承载滚筒1
‑
3转动时带动养殖箱2向前移动。见图1、2所示,本发明在输送支撑架1
‑
1上部还安装有对养殖箱2两侧限位的侧限位滚轮1
‑
2,在养殖箱2被输送时,不会脱离输送装置1。
35.见图1~6所示,本发明输送支撑架1
‑
1对应于导向下料装置安装有用于检测养殖箱2位置的位置传感器1
‑
5及用于对移动的养殖箱2停止或解除停止的限位机构1
‑
6,本发明的位置传感器1
‑
5可采用光电传感器或其它传感器,当输送装置1把养殖箱2向喂料工位输送时,位置传感器1
‑
5会输出养殖箱初始位置信号给喂料plc控制系统。见图9所示,本发明的限位机构1
‑
6包括限位气缸1
‑
61、导向座1
‑
63和挡板1
‑
61,导向座1
‑
63和限位气缸1
‑
61安装在输送支撑架1
‑
1上,限位气缸1
‑
61与挡板1
‑
61连接,挡板1
‑
61安装在限位气缸1
‑
61的活塞杆上,挡板1
‑
61设置在导向座1
‑
63内并能上下移动。本发明的挡板1
‑
61可设有多个,可采用一个限位气缸1
‑
61带动多个挡板1
‑
61同步移动,也可多个限位气缸1
‑
61分别与各自的挡板1
‑
61并同步移动,挡板1
‑
61的顶部超出承载滚筒1
‑
3上方用于对养殖箱2的限位,挡板1
‑
61的顶端低于承载滚筒的上方解除对养殖箱2的限位,在养殖箱2移动到喂料工位,则限位机构1
‑
6挡住养殖箱2不能前移而进行喂料操作。
36.本发明的喂料plc控制系统用于接受位置传感器1
‑
5监测的养殖箱2的初始位置信号,并根据初始位置信号以及存储设定的运行程序输出信号,分别控制限位机构1
‑
6、压辊驱动机构、断料驱动件7
‑
3和闸板驱动件8
‑
1动作。本发明的喂料plc控制系统可采用现有的工控机,工控机内存储有设定的运行程序,在接收养殖箱2的初始位置信号后,根据设定的运行程序,在养殖箱2进入喂料工位后,输出信号控制限位机构1
‑
6动作,限位气缸1
‑
61带动挡板1
‑
61伸出挡住养殖箱2而停止前移,此时喂料plc控制系统输出信号控制两电机4
‑
1运行,两压辊4
‑
7旋转而挤压饲料,同时喂料plc控制系统输出信号给断料驱动件7
‑
3带动摆臂7
‑
2使断料板7
‑
1向上转动,而闸板驱动件8
‑
1带动闸板8
‑
3缩回,给料通道被打开,片状饲料加入养殖箱2,当饲料堆积完成后,喂料plc控制系统输出信号,两电机4
‑
1停止运行、压辊4
‑
7停止旋转,断料驱动件7
‑
3带动摆臂7
‑
2使断料板7
‑
1向下转动并切断饲料,而闸板驱动件8
‑
1带动闸板8
‑
3伸出挡住给料通道,限位气缸1
‑
61带动挡板1
‑
61缩回至初始位置,养殖箱2继续向前运行,实现自动化喂料操作。
37.见图10所示,本发明的用于餐厨垃圾生物养殖的生产线,包括养殖立库以及用于餐厨垃圾生物养殖的自动喂料设备,本发明的养殖立库包括用于存放养殖箱2的多排立体货架9、堆垛机以及搬运小车和养殖plc控制系统,输送装置1与立体货架9相对应,本发明的输送装置1可采用多条组装而成,输送装置1贯穿于整条养殖生产线,带动养殖箱2将喂料设备和养殖立库结合成为一条产线,高层的立体货架9用于存放养殖箱2并进行管理。本发明的堆垛机设于两排立体货架9之间,可采用一个或多个,将堆垛机集成在立体货架9上,用于以搬运立体货架9上的养殖箱2。本发明的搬运小车用于将立体货架9内的养殖箱2搬出放入输送装置1上或将养殖箱2从输送装置1搬进立体货架9上,养殖plc控制系统用于控制堆垛机和搬运小车动作,实现对养殖箱2的生物养殖、存储和出入库作业的自动控制和管理。本发明的养殖plc控制系统根据养殖箱2在立体货架9上的存放位置信息以及预存的养殖程序控制堆垛机和搬运小车动作。本发明的喂料plc控制装置可采用工控机,内存储有养殖程序,如昆虫的类别、生长周期、吃食情况等信息,根据养殖昆虫的类别以及生长周期和吃食情况进行养殖管理,堆垛机和搬运小车动作由喂料plc控制装置对养殖箱2执行出入库动作。
38.本发明还具有远程监控系统,远程监控系统用于对养殖立库内的养殖箱2的位置以及养殖状态和喂料状态进行监控,并将监控数据发送给上位机,养殖plc控制系统及喂料plc控制装置与远程监控系统通讯,对养殖箱2喂料状态、养殖状态以及出入库状态实现远程监控。
39.见图1~10所示,本发明工作时,将预处理后的餐厨垃圾饲料经料仓、螺旋皮带机送入星形给料机内,星形给料机内的叶片均速运行,餐厨垃圾饲料经进料箱5进入对辊给料装置4内,输送装置1带动养殖箱2向前移动,当位置传感器1
‑
5监测到养殖箱2的初始位置时,喂料plc控制系统根据接收到的初始位置信号,当养殖箱2到达喂料工位后,限位气缸1
‑
61带动挡板1
‑
61伸出挡住养殖箱2,养殖箱2停止向前移动,此时喂料plc控制系统输出信号控制两电机4
‑
1运行,两压辊4
‑
7旋转而挤压饲料,同时断料驱动件7
‑
3带动摆臂7
‑
2转动,使断料板7
‑
1向上转动至竖向而对片料导向,闸板驱动件8
‑
1带动闸板8
‑
3缩回,给料通道打开,片料加入养殖箱2内。当饲料堆积完成后,喂料plc控制系统输出信号,控制两电机4
‑
1停止运行,两压辊4
‑
7停止旋转而停止给料,断料驱动件7
‑
3带动摆臂7
‑
2使断料板7
‑
1向下转动并切断饲料,同时闸板驱动件8
‑
1带动闸板8
‑
3伸出关闭给料通道,此时限位气缸1
‑
61带动挡板1
‑
61缩回至初始位置,养殖箱2继续向前运行。堆积有饲料的养殖箱2在输送装置1上加入虫卵或幼虫,并送至养殖立库处,搬运小车将加料的养殖箱2搬至立体货架9上,堆垛机根据养殖plc控制系统的信息放置立体货架9不同的区域进行入库储存,随幼虫生长发育,如果还需要接收饲料,搬运小车将的养殖箱2搬至输送装置1上再次接收饲料,再将养殖箱2搬至立体货架9上,养殖plc控制系统根据昆虫的类别、生长周期、吃食情况进行养殖控制和管理,在幼虫成型后,再控制搬运小车将养殖箱2搬出,执行出库动作,对养殖箱2的喂料、生物养殖、存储及入出库作业进行自动控制和管理。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。