1.本发明属于大气污染检测技术领域,具体地说是涉及一种工业园区异味检测的方法。
背景技术:
2.恶臭作为一种感觉性公害,已成为当前不容忽视的大气环境污染问题。工业园区存在大量vocs、h2s、nh3等恶臭气体的排放源,包括有组织和无组织排放,污染物种类多、成分复杂,如何准确、快速检测异味气体是治理恶臭污染的关键前提,然而目前尚未有行之有效的方法。
3.气体传感器在大气污染物检测领域应用广泛,具有极大的发展潜力,相比常用的质谱、光谱、色谱等方法,气体传感器具有成本低、体积小、速度快的优势。在使用传感器法分析多组分复杂气体时,其基本技术路线是使用多个传感器组成阵列,再利用模式识别算法来分析物质种类和浓度,从而解决不同气体对传感器的干扰问题。市场上存在一些基于传感器阵列的异味检测设备,例如德国airsense公司、美国sensigent公司、韩国科学技术分析中心(slc)等推出了异味电子鼻产品,主要以在线监测微站和手持式测量仪为主,对于大范围监测需要布置大量点位。
4.随着无人机技术的发展,一些研究尝试将传感器阵列搭载于无人机上,可以较少的设备完成整个园区的巡检,然而无法直接建立起污染源特征与巡检结果的关系,巡检数据的准确性和解释性较差。
技术实现要素:
5.为了克服现有技术存在的不足,本发明提供了一种工业园区异味检测的方法,可以高效、准确、便捷地对工业园区的异味气体污染物进行监测。本发明定点检测和飞行巡检的联合使用有利于扩展监测范围、提高巡检精度,可解决工业园区异味监测系统的准确性、覆盖范围、成本等要素之间的矛盾。
6.本发明采用的技术方案为:
7.一种工业园区异味检测方法,包括下述步骤:
8.s1、将异味检测装置固定在监测点上,接通电源;
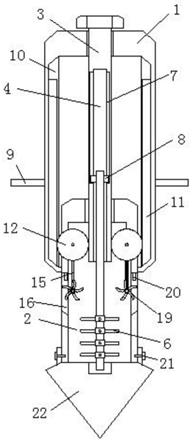
9.所述异味检测装置包括气体采样模块、异味检测模块、电源模块、外壳、巡检安装板;所述气体采样模块包括抽气泵、清洗气瓶;所述异味检测模块包括气体传感器阵列(包含但不仅限于vocs传感器、h2s传感器、nh3传感器、温湿度传感器)、测试腔、信号采集及传输单元,通过算法解析传感器阵列对待测气体的响应特征进行异味分析;
10.s2、打开清洗气瓶,将洁净空气通入测试腔,待传感器信号稳定后作为基线,通过信号采集及传输单元发送至服务器,存入数据库;
11.s3、关闭清洗气瓶,打开抽气泵将待测气体吸入测试腔内,待传感器信号稳定后作为检测值,通过信号采集及传输单元发送至服务器,存入数据库;
12.s4、重复步骤s2
‑
s3,获取该监测点位的特征污染物,积累数据库;数据库中包含了该点位的传感器阵列响应特征图谱;
13.s5、拆下异味检测装置,将外壳嵌入巡检安装板,用安装板夹持无人机起落架;
14.s6、操控无人机在指定位置悬停或按指定路线飞行,进入巡检模式,执行步骤s2
‑
s3,获取和保存传感器阵列响应信号;
15.s7、操控无人机到指定的固定监测站点,拆下巡检安装板,执行步骤s1
‑
s4,实现不同点位之间的切换,并积累不同排放源的特征污染物数据库;
16.s8、接步骤s4或步骤s6,通过每次检测时获得的传感器阵列响应信号分析出本次检测的异味结果。
17.作为优选,步骤s3与s4之间还包括下述步骤:
18.采集待测气体样品,通过实验室分析方法标定异味气体组分和浓度,存入数据库,与步骤s3的信号组合,作为传感器模式识别算法训练数据。
19.作为优选,数据库还包含了特征污染物种类和浓度范围,以及传感器响应与特征污染物的对应关系。
20.作为优选,每次检测时获得的传感器响阵列应信号根据传感器响应数据库、特征污染物数据库、模式识别算法分析出本次检测的异味结果。
21.本发明不同固定监测点和飞行巡检共享数据库,并在检测过程中不断积累数据,可提高检测精度。
22.作为优选,所述采样模块、异味检测模块、电源模块分别安装在外壳内,所述外壳两侧设有外壳滑接口,所述巡检安装板上设有与外壳滑接口对应的安装接口,巡检安装板两端还设有用于夹持无人机起落架的角卡扣;所述外壳上还设有把手。
23.作为优选,所述抽气泵通过管路与外壳上的进气孔相连通,抽气泵与测试腔相连通,所述清洗气瓶上设有电磁阀,所述气体传感器阵列通过信号采集及传输单元与服务器相连,所述抽气泵、电磁阀通过控制电路与服务器相连。电磁阀可由控制电路控制开关和出口压力,控制电路用于连接和控制气体采样、清洗腔体、数据传输、在线监测、飞行巡检等动作。
24.作为优选,所述抽气泵为微型气泵,流量在20~100ml/min之间;所述清洗气瓶容积为500ml;所述测试腔采用分层设计,测试腔的气体流道体积小于2ml。异味检测模块中的测试腔通过合理设计,气体流道体积小于2ml,采用500ml小体积清洗气瓶,降低了运载负荷,提高无人机巡检续航能力。
25.作为优选,所述传感器阵列由若干传感器组成,所述传感器包括异味气体传感器、光离子化传感器、乙烯传感器、温湿度传感器;所述异味气体传感器检测的异味气体包括氨气、硫化氢、一氧化氮、二氧化氮、二氧化硫、甲硫醇、环氧乙烷。
26.作为优选,所述巡检安装板包括第一安装板和第二安装板,所述外壳上设有翻盖。外壳可通过翻盖开启,便于定期更换清洗气瓶。
27.外壳用于封装其他模块,两侧带有滑接口,可直接嵌入微型空气监测站在固定点工作;安装板分左右两块,带有与外壳匹配的安装接口,两端带有角卡扣,外壳插入安装板后通过其角卡扣可夹持在无人机起落架上,随无人机飞行完成巡检。
28.作为优选,所述电源模块中内置移动电源,所述移动电源采用7.4v双节串联锂电
池组,容量为3400mah。采用可充放电池,异味检测装置嵌入微型监测站工作时可对巡检时所用的移动电源进行充电。
29.所述气体采样模块通过控制清洗气瓶上的电磁阀开关与压力完成对异味监测模块中测试腔的清洗和传感器阵列零点标定;通过控制抽气泵将待测气体抽入异味监测模块进行检测;
30.所述异味检测模块集成了多种污染物的传感器阵列,采集传感器信号后通过无线传输的方式导出数据;
31.所述电源模块可直接接入220v标准交流电,输出直流电对其他模块进行供电,同时对其中包含的移动电源进行充电;
32.所述外壳对各模块进行封装,其结构设计可直接嵌入微型监测站对固定点进行异味在线检测,也可夹持无人机起落架进行园区范围内的飞行巡检。
33.本发明基于传感器阵列的异味检测装置可以搭载无人机平台进行巡检,也可以嵌入微型监测站检测污染源气体组分,建立园区大气环境和各类异味污染源之间的联系,有利于异味溯源和评估。
34.本发明有益效果:
35.本发明定点检测和飞行巡检的联合使用及数据库共享,有利于扩展监测范围、提高巡检精度,可解决工业园区异味监测系统的准确性、覆盖范围、成本等要素之间的矛盾,同时建立起污染源特征与大气环境污染情况的联系,为园区异味污染溯源和评估提供支撑。本发明克服了定点检测覆盖范围小、飞行巡检缺乏与污染源的关联问题,适用于工业园区多污染源、多污染物造成的复杂环境异味监测与评估。
附图说明
36.图1是本发明异味检测装置结构示意图;
37.图2是本发明异味检测模块示意图;
38.图3本发明异味检测装置外壳与巡检安装板的结构示意图;
39.图4是本发明异味检测装置与无人机配合使用的结构示意图;
40.图5本发明异味检测方法流程图;
41.图6本发明异味检测案例结果图;
42.图7本发明异味连续监测结果图。
具体实施方式
43.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面结合附图和实施例对本发明作进一步说明,但本发明所要保护的范围并不限于此。在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。应当理解,本发明的实施并不局限于下面的实施例,对本发明所做的任何形式上的变通和/或改变都将落入本发明保护范围。
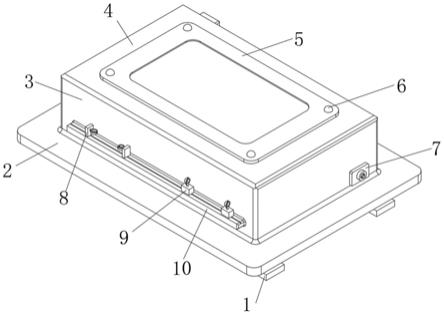
44.参照图1~4,一种工业园区异味检测方法,采用异味检测装置,所述异味检测装置包括气体采样模块、异味检测模块2、电源模块3、外壳4、巡检安装板5;
45.所述气体采样模块包括抽气泵1
‑
1,管路1
‑
2,电磁阀1
‑
3,清洗气瓶1
‑
4;
46.所述抽气泵1
‑
1用于抽取待测气体,选用微型气泵,流量在20~100ml/min之间可调;
47.所述电磁阀1
‑
3可由程序控制开关和出口压力;
48.所述清洗气瓶1
‑
4用于定期清洗测试腔和传感器基线标定,容积为500ml,装有高压洁净空气,可对测试腔完成约100次以上清洗;
49.所述异味检测模块包括气体传感器阵列2
‑
1,测试腔2
‑
2,信号采集及传输单元(信号采集及传输电路)2
‑
3;
50.所述传感器阵列2
‑
1包含nh3、h2s、no、no2、so2、甲硫醇(ch4s)、环氧乙烷(eto)等几种恶臭气体的传感器各一个;还包括光离子化传感器(pid)一个,用于检测vocs;c2h4传感器一个,用于弥补pid对小分子vocs检测的不足;
51.所述传感器阵列2
‑
1还包含温湿度传感器,便于校正环境对测试结果的影响;
52.所述测试腔2
‑
2采用分层设计,可有效提高响应速度、节省气量,本实例采用的测试腔的气体流道体积仅为1.6ml;
53.所述信号采集及传输单元2
‑
3接收电压模拟信号作为输入,并对电压信号进行滤波放大,其中滤波放大后的电压信号在0~3.3v之间,采样周期为500ms,采样通道数为10,集成了4g无线传输模块,用于将数据发送至服务器;
54.所述抽气泵1
‑
1、电磁阀1
‑
3通过控制电路与服务器相连,控制电路具有对抽气泵1
‑
1和电磁阀1
‑
3程序控制功能,也可以接收服务器发送指令进行控制。
55.所述电源模块3中内置移动电源采用7.4v双节串联锂电池组,容量为3400mah,可供装置稳定运行约8小时;电源模块3可直接接入220v标准交流电,输出直流电压对其他模块进行供电,同时对内置的移动电源进行充电。
56.所述外壳可通过两侧滑接口4
‑
1单独嵌入微型监测站固定,也可以与巡检安装板上的滑接口5
‑
1连接,并通过巡检安装板两端的角接口5
‑
2夹持无人机起落架5
‑
3实现固定;
57.外壳上设有把手4
‑
2,便于检测模式切换时装置的拆装与手提;所述巡检安装板包括第一安装板和第二安装板,所述外壳上设有翻盖,外壳可通过翻盖开启,便于定期更换清洗气瓶。
58.所述搭载无人机选用eft六轴无人机,自带飞控模块、gps定位模块、超声波测距模块。
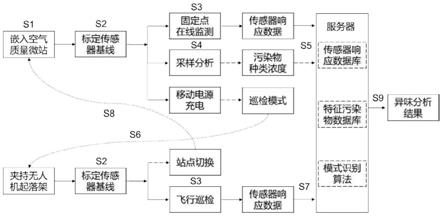
59.采用上述装置的工业园区异味检测方法,运行逻辑如图5所示,包括下述步骤:
60.s1、嵌入空气质量微站:将异味检测装置通过外壳的滑接口4
‑
1嵌入固定监测点(空气质量微站)上的接口,接通电源,进入固定点在线监测模式;
61.s2、标定传感器基线:打开电磁阀1
‑
3,将清洗气瓶1
‑
4中的洁净空气通入测试腔2
‑
2,待传感器阵列2
‑
1信号稳定后作为基线,通过信号采集及传输单元2
‑
3发送至服务器,存入数据库;
62.s3、固定点在线监测:关闭电磁阀1
‑
3,打开抽气泵1
‑
1将待测气体吸入测试腔2
‑
2内,待传感器阵列2
‑
1信号稳定后作为检测值,通过信号采集及传输单元2
‑
3发送至服务器,存入数据库(传感器响应数据);
63.s4、采样分析:可选地,采集待测气体样品,通过实验室分析方法标定主要异味气
体组分和浓度,存入数据库(污染物种类浓度),与步骤s3的信号组合,作为传感器模式识别算法训练数据,本实例中所选气体传感器选择性较好,不易受干扰气体影响,因此本步骤可以视情况省略;
64.s5、重复步骤s2
‑
s4,获取该监测点位的特征污染物,积累数据库,数据库中包含了该点位的传感器阵列响应特征图谱,若步骤s4被执行,则数据库还包含了特征污染物种类和浓度范围,以及传感器响应与特征污染物的对应关系;
65.s6、根据需要,可随时拆下异味检测装置,将外壳嵌入巡检安装板,用安装板夹持无人机起落架,本实例中固定点监测的同时对内置移动电源进行充电,充电完成可随时进入飞行巡检模式;
66.s7、进入巡检模式后,操控无人机在指定位置悬停或按指定路线飞行,执行步骤s2
‑
s3获取和保存传感器阵列响应信号;
67.s8、根据需要,操控无人机到指定的固定监测站点,拆下巡检安装板,执行步骤s1
‑
s5,实现不同点位之间的切换,并积累不同排放源的特征污染物数据库;
68.s9、接步骤s5或步骤s7,每次检测时获得的传感器响应信号根据传感器响应数据库、特征污染物数据库、模式识别算法分析出本次检测的异味结果。
69.异味气体检测效果
70.本发明实例中异味检测模块选用传感器型号、量程、分辨率如表1所示:
71.表1
72.传感器名称型号量程分辨率nh3传感器honeywell 4nh3
‑
1000
‑
100pm0.5ppmh2s传感器membrapor h2s/m
‑
500
‑
50ppm0.05ppmno传感器alphasense no
‑
a40
‑
20ppm20ppbno2传感器alphasense no2
‑
a43f0
‑
20ppm20ppbso2传感器alphasense so2
‑
a40
‑
50ppm20ppb甲硫醇传感器honeywell 4ch3sh
‑
100
‑
10ppm0.1ppmeto传感器membrapor eto/m
‑
100
‑
10ppm0.1ppmc2h4传感器membrapor c2h4/m
‑
100
‑
10ppm0.1ppmpidbaseline evx 20ppm0
‑
20ppm1.5ppb
73.在某精细化工企业废水处理站环境空气中各污染气体的传感器响应情况如图6所示,雷达图中传感器响应浅色图形为基线,深色图形为检测值,左中右雷达图分别为不同时刻(不同日期)检测的结果。对比左图和中图,两者均反映了甲硫醇、硫化氢、二氧化硫、二氧化氮污染,两者检测结果图形相似说明不同时刻发生了同一类异味污染特征,而中图各传感器响应值均等比例高于左图,说明后者的污染情况更严重。对比右图和中图,发现污染物种类明显变化,此时主要异味污染物为氨气和二氧化硫。从雷达图中可以看出,本发明对同种类型的异味污染具有很好的重复性,不同类型的异味检测有明显的响应差异,且对污染程度有直观的反映。
74.某天连续监测过程中各传感器响应随时间的变化如图7所示,在近12小时的时间段内,大部分时间传感器处于平稳的基线状态(no2传感器基线为2000mv左右,pid基线为60mv左右,其余传感器基线为300mv左右,响应值可在0~3300mv之间变化),在晚间18:00~
22:00之间一些传感器响应值明显变大,意味着检测到异味污染物,事实上晚间21:00时刻的响应值即为图5中间雷达图所示。
75.以上结果有效说明了本实例对异味气体检测的优良效果。
76.本发明通过嵌入固定点空气质量微站,可识别污染源排放的特征异味污染物;可结合现场采样分析,标定和校准传感器信号;可为飞行巡检的电源充电;通过无人机搭载飞行巡检,可扩大检测范围、快速切换检测点位;定点检测与飞行巡检可共享异味数据库。本发明克服了定点检测覆盖范围小、飞行巡检缺乏与污染源的关联问题,适用于工业园区多污染源、多污染物造成的复杂环境异味监测与评估。
77.以上结合实施例对本发明进行了详细说明,但所述内容仅为本发明的具体实施方式,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,凡依本发明申请范围所做出的若干变形与改进等,均应仍属于本发明的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。