1.本发明属于航空航天实验技术领域,涉及一种进气道激波边界层干扰特性测量方法。
背景技术:
2.激波边界层干扰是超/高超声速飞行器中普遍存在的一种复杂流动现象,这一现象往往会对飞行器的气动力/热分布产生显著的影响,从而影响整个飞行器的气动性能和防热特性。尤其是对于复杂来流条件下跨声速机翼和叶栅、超燃冲压发动机进气道和隔离段等内流场激波边界层干扰特性分析中,缺乏对复杂流场的波系结构、流态变化、全场动态压力变化等多物理场参数非定常特性的全方位观测和分析,而现有的研究方法对典型激波边界层干扰流动结构、分离特征、激波串流场缺乏全局、直观辨识方法。传统测量方法一般采用单点传感器测量发动机内部压力特性来预测流动分离情况,由于布点不可能太多,对于分离位置判断精度很低,而且对大面积压力脉动无能为力,结果非常不直观而且获得信息量少。进气道实验项目大部分仅限于总压恢复系数、流量系数、进气道出口截面流场均匀性三项参数测量,对于进气道内表面全局压力分布、内流场速度场信息、波系结构、层流湍流流态变化、边界层厚度、激波边界层三维壁面效应、表面涡流近似摩擦力线分布等内流特性无法有效观测。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提出一种进气道激波边界层干扰特性测量方法。
4.本发明解决技术的方案是:
5.一种进气道激波边界层干扰特性测量方法,该方法的步骤包括:
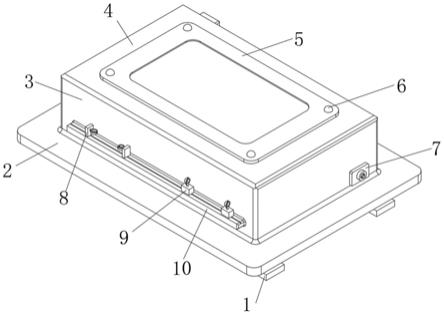
6.步骤一,根据风洞试验模拟相似性准则为发动机进气道设计缩比框架式试验模型,在缩比框架式试验模型上设计光学可视化窗口,用于观测缩比框架式试验模型中的内流场;
7.步骤二,在缩比框架式试验模型的待测量区域喷涂压敏漆,所述压敏漆为聚合物形成的多孔性涂层结构,孔中包含有荧光探针分子;
8.步骤三、选择psp测量使用的第一图像采集设备和第一光源,对压敏漆涂料的动态响应特性进行标定,确定第一图像采集设备的拍摄距离、曝光时间,第一光源的照射距离和光强度、压敏漆涂料的发光
‑
压力关系式;
9.步骤四、搭建psp测量系统,所述psp测量系统包括风洞、高超声速喷管、缩比框架式试验模型、第一光源和第一图像采集设备;
10.将缩比框架式试验模型和高超声速喷管放置在风洞试验段,且缩比框架式试验模型放置于高超声速喷管的均匀区域内,第一光源和第一图像采集设备放置于风洞光学顶窗外侧,透过风洞光学顶窗,能够观察到缩比框架式试验模型的光学可视化窗口;依据步骤三
确定的第一图像采集设备参数、第一光源参数对图像采集设备和光源进行设置;
11.步骤五、开启psp测量系统各设备,进行psp测量,获得进气道内表面压力分布特性、激波的大小、位置、激波边界层的流态发展和表面涡流近似摩擦力线分布特性;
12.步骤六、搭建piv测量系统,所述piv测量系统包括风洞、piv雾化示踪粒子发生器、高超声速喷管、缩比框架式试验模型、第二光源、第二图像采集设备以及同步触发器;
13.将缩比框架式试验模型和高超声速喷管放置在风洞试验段,且缩比框架式试验模型放置于高超声速喷管的均匀区域内,第二光源布置在风洞试验段顶部,第二图像采集设备位于风洞试验段一侧观察窗;piv雾化示踪粒子发生器放在高超声速喷管的前端;同步触发器用于控制第二光源和第二图像采集设备同步工作;
14.步骤七、先运行第二图像采集设备,拍摄缩比框架式试验模型内流场;然后开启piv雾化示踪粒子发生器,使其发出的粒子随喷管流场一起进入风洞,第二图像采集设备捕捉粒子从无到有全过程;根据拍摄的图像,利用自相关算法获取进气道内流场的速度场信息和波系结构;
15.步骤八、搭建纹影测量系统,所述纹影测量系统包括风洞、高超声速喷管、缩比框架式试验模型以及双镜平行光式纹影仪;
16.将缩比框架式试验模型和高超声速喷管放置在风洞试验段,且缩比框架式试验模型放置于高超声速喷管的均匀区域内,双镜平行光式纹影仪放置于风洞光学顶窗外侧;
17.步骤九、双镜平行光式纹影仪以平行光入射于风洞试验段,双镜平行光式纹影仪内的单反相机捕捉缩比框架式试验模型内部的密度场图像,获得进气道内层流湍流流态变化和边界层厚度。
18.所述步骤一中,光学窗口对于激发光源的波长和受激辐射光波长具有良好的透过率,且光学窗口各处等厚。
19.所述步骤五中,所述进行psp测量,获得进气道内表面压力分布特性、激波的大小、位置、激波边界层的流态发展和表面涡流近似摩擦力线分布特性的方法如下:
20.(5.1)开启psp测量系统各设备,来流通过高超声速喷形成高超声速流场,连续采集n张吹风状态下的图像;
21.关闭高超声速喷管,采集m张无风状态下的参考图像,n>>m;
22.(5.2)通过图像比获取流场的壁面表面基于时间序列的压力图像序列,实现方法如下:
23.计算m张参考图像上同一个像素点的平均灰度值,得到一张参考图像平均值图像;
24.利用如下公式计算m张参考图像上像素点(x
i
,y
i
)的平均灰度值g;
[0025][0026]
g
m
(x
i
,y
i
)为第m张参考图像中像素点(x
i
,y
i
)的灰度值,i∈[1,i],i为图像中的像素点总数;
[0027]
第j张吹风状态下图像上每个像素点的灰度值除以平均值图像上对应像素点的灰度值,得到第j张吹风状态下的压力图像;
[0028]
j遍历[1,n],得到n个相对于时间序列的压力图像序列;
[0029]
(5.3)利用正交变换方法将压力图像序列转换为模态序列,截取前n阶模态,从前n
阶模态中剔除与压力脉动无关的噪声和无效模态,将剩余与压力脉动相关的模态通过反正交变换重构得到与原来同时间分布的压力图像序列;
[0030]
(5.4)根据(5.3)重构得到的压力图像序列,获得每一点的压力值,从而得到压力分布特性、激波的大小、位置、激波边界层的流态发展。
[0031]
所述步骤(5.3)中,利用正交变换方法将压力图像序列转换为模态序列的方法如下:
[0032]
寻找一组最佳的标准正交基;
[0033]
使压力图像序列中每个压力图像数据在该标准正交基上的投影依次递减,每个压力图像数据在该标准正交基上的投影即为模态序列。
[0034]
所述步骤(5.3)中,前n阶模态的能量之和超过总能量的90%。
[0035]
所述步骤五中,所述进行psp测量,获得表面涡流近似摩擦力线分布特性的方法如下:
[0036]
采用表面近似摩擦力线提取方法,对流场的ns方程进行处理,得到压力梯度
‑
摩擦力方程;
[0037]
当边界层涡通量未知时,通过压力梯度解算压力梯度
‑
摩擦力方程,求得摩擦力矢量的相对大小和方向。
[0038]
对流场的ns方程进行处理,得到压力梯度
‑
摩擦力方程的处理方式如下:
[0039]
流场的ns方程如下:
[0040][0041]
在近壁面底层,ns方程简化为:
[0042][0043]
两端同时乘以摩擦力线方程τ=μω
×
n得:
[0044][0045]
引入涡通量ω=|ω|2/2,有:
[0046][0047]
方程中第二项为相对小量,引入边界层涡通量f
ω
,得到压力梯度
‑
摩擦力方程为:
[0048][0049]
其中,ρ为密度,u为速度,t为时间,为导数,为梯度,p为压力,μ为粘性系数,为拉普拉斯算子,θ为速度的旋度,f为单位质量彻体力,z为边界层厚度方向,τ为粘性摩擦力,ω为涡量,n为单位外法向矢量,k
ω
为涡量系数。
[0050]
第一光源为波长400nm的紫外光源,第一图像采集设备为普通相机。
[0051]
第二光源为yag双曝光激光器,激光器出光孔处装有导光臂和集成片光源;第二图像采集设备为跨帧数字相机。
[0052]
本发明与现有技术相比的有益效果是:
[0053]
(1)本发明方法获得的全局表面压力图像空间分辨率高,压力信息全面,流场可视化更直观,结合粒子图像测速和纹影等方法获取的空间脉动压力场、空间速度场和密度场信息,对进气道内部复杂流场的非定常特性和流态变化及精细结构进行全方位观测和分析,同时为激波边界层干扰、空间拓扑结构分析提供了强有力的分析手段。传统流场测量方法中,只能通过测压传感器或测温传感器获取关心测量区域的单点压力或单点温度,采用压敏漆测量方法获得的流场表面压力是全局测量的,大面积的定量测试方法,现有技术不存在针对连续大面积的表面压力分析和处理方法,目前没有其他方法能够获得这一观测结果。
[0054]
(2)基于模态进行表面全局压力信息分解和重构能更清晰、高效的获取流场的波系结构和能量分布,是传统测量方法和处理方法无法获取的。本发明中采用高效的降阶方法和psp非接触测量手段相结合方式,对激波边界层干扰引起的表面压力和全局分布特性进行分解再重构,能够清晰地捕捉到激波边界层干扰的区域和位置,帮助判定流场内部结构和特点,目前未有针对进气道内激波边界层和激波串结构分析等相关工作开展。
[0055]
(3)本发明能够有效观测进气道内表面全局压力分布、内流场速度场信息、波系结构、层流湍流流态变化、边界层厚度、激波边界层三维壁面效应、表面涡流近似摩擦力线分布等内流特性,弥补现有技术的不足,对典型激波边界层干扰流动结构、分离特征、激波串流场提供全局、直观辨识方法。
附图说明
[0056]
图1为发明提供的方法原理图;
[0057]
图2为本发明流程图;
[0058]
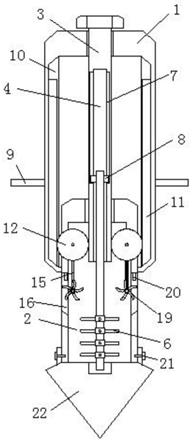
图3为psp测量系统示意图;
[0059]
图4为psp获取的表面结构和幅值与纹影对比结果;
[0060]
图5为粒子图像拍摄显示结果;
[0061]
图6为进气道内流的波系结构及激波边界层干扰;
[0062]
图7为pod模态分解重构得到主要压力脉动位置;
[0063]
图8为表面近似摩擦力大小相对分布。
具体实施方式
[0064]
下面结合附图对本发明作进一步阐述。
[0065]
本发明针对复杂流场激波边界层干扰特性分析测量需求,通过对模型进行光学可视化设计加工结合先进流动测试技术,开展对复杂流场激波边界层干扰的波系结构、流态变化、全场动态压力变化等非定常特性的全方位观测和分析,弥补数值模拟和常规风洞试验的不足,形成模型复杂流场可视化测试能力,为翼型、叶栅和进气道的设计、流动控制及改进提供原理性试验依据。图1为本发明的原理图。
[0066]
为了分析激波边界层干扰特性,本发明提出基于压敏漆和全场时间序列压力分布模态分解技术的方法,该方法是一种对大面积压力分布的高效的降阶方法,其核心思想是寻找一组最佳的标准正交基,使得样本数据在该标准正交基上的投影依次迅速递减,通过分析激波边界层干扰结构特性和能量特征,对压力相关分解的能量模态进行分析和截取,
剔除流场噪声、随机脉动等不相干模态,从而可以用较少的基展开获得较高阶数据的近似描述,尤其对激波入射结构判定、影响区域、三维效应等气动特征的描述更直观和定量。用模态分解方法对压力场图像进行分解后,得到了发生压力脉动的位置,波系结构特性和强度,不仅能够获得进气道气动特性研究方法,而且还能掌握流场非定常气动载荷流场显示技术,补充典型激波边界层干扰特性非定常气动载荷数据库。
[0067]
本发明方法,需要如下准备条件:首先准备三面带可视透明窗口的进气道缩比框架式试验模型,将进气道的主体结构分割为若干个块,对每个块建立缩比试验模型,若干个缩比实验模型拼接后形成缩比框架式试验模型。
[0068]
将进气道缩比框架式试验模型待测量底部区域喷涂有压敏漆,喷涂好的缩比框架式试验模型安装在风洞试验段内,通过测试设备和风洞进行流场测量,通过侧窗拍摄流场粒子图像和纹影结果,通过顶部测量底面表面发光图像,最终获取进气道内表面全局压力分布、内流场速度场信息、波系结构、层流湍流流态变化、边界层厚度、激波边界层三维壁面效应、表面涡流近似摩擦力线分布等内流特性。
[0069]
如图2所示,具体步骤如下:
[0070]
(1)缩比框架式试验模型设计:根据风洞试验模拟相似性准则为发动机进气道设计缩比框架式试验模型,合理简化试验模型,满足psp、piv、纹影三种非接触流动显示技术的测量需求。在缩比框架式试验模型待测量区域三面设计光学窗口。该光学窗口对于激发光源的波长和受激辐射光波长须具有良好的透过率,且光学窗口尽量为等厚,以减少光学畸变造成的影响。
[0071]
(2)在缩比框架式试验模型的底部待测量区域喷涂压敏漆
[0072]
1.取步骤(1)设计后的模型进行压敏漆涂料喷涂作业,压敏漆涂料采用pttfpp作为发光基团,其稳定性较强。涂料的激发光源为波长400nm紫外光源,激发出的荧光发射波长区域为600
‑
700nm。压敏漆涂料为由聚合物形成的多孔性的涂层结构,荧光探针分子(pttfpp)包含在这些微孔之中,增大了空气接触面积,使得响应扩散率增加即降低了反应时间。喷涂前清洁缩比框架式试验模型表面,用酒精、丙酮去除油污灰尘,后用质量好的清洁布擦除,避免使用棉花或纱布。喷涂前在通风柜开启条件下打扫实验室,保证喷涂室内清洁无灰尘,保证喷涂室内不会因为喷枪喷射气流过程中引起灰尘或颗粒混杂进涂料中。喷涂气源需要干净气源,可用2级过滤器清洁气源。喷涂时,选择高压喷枪喷涂气压3~4bar,喷涂距离18~23cm。如操作人员不够娴熟,可考虑加工固定距离的移动装置辅助喷涂。喷枪与待喷件保持一定垂直距离,匀速往复运行。喷涂过程中,喷枪与被喷件保持垂直90
°
角,以保证涂料完全均匀的喷涂在模型表面。喷枪要求喷幅重叠50%以上。喷枪移动保持平稳匀速,喷涂速度为30~50cm/s。喷涂速度太快会令油漆太干,表面粗糙,容易产生橘皮;而喷涂太慢较容易产生流挂及下坠。因此将喷枪的喷涂移动速度控制在30~50cm/s可有效防止褶皱、表面粗糙和橘皮现象。喷涂结束后静置10分钟左右,然后放进高温烘箱在60℃下加热5小时,待漆膜完全固化后,停止加热,自然冷却,待用。
[0073]
(3)对步骤(2)喷涂后的缩比框架式试验模型进行动态标定。动态标定试验应用专门设计的动态标定装置进行标定,可通过激波管、驻波管、高速喷流或振荡射流发生器产生压力阶跃或高频射流的方法对涂料的动态压力响应进行标定。涂料的动态响应特性需满足风洞试验流场特征频率要求。对动态标定后的模型进行发光
‑
压力对应关系校准,校准压力
和温度范围大于整个试验测量范围,校准后得到的发光
‑
压力关系式可用于表面压力的定量测量。得到第一图像采集设备3的拍摄距离、曝光时间,第一光源的照射距离和光强度、涂料的发光
‑
压力关系式。
[0074]
通过动态标定装置产生高频射流或阶跃压力的方法对压敏漆涂层的压力响应进行标定,响应时间在微秒量级的动态压敏漆才可用于本方法的高超声速流场进气道内表面的动态压力获取。
[0075]
(4)按照图3搭建psp测量系统,psp测量系统包括喷管1、缩比框架式试验模型2、第一图像采集设备3和第一光源4,搭建psp测量系统时,将缩比框架式试验模型和高超声速喷管放置在风洞试验段中,将缩比框架式试验模型放置于高超声速喷管的均匀区域内,第一光源和第一图像采集设备位于风洞光学顶窗5外侧,且透过风洞光学顶窗5,能够观察到缩比框架式试验模型的光学窗口7及缩比框架式试验模型的内流场。图3中,6为压敏漆涂层,光学窗口5材料为石英玻璃。每次试验都连续采集1000张吹风状态下的图像,然后采集100张无风状态下的参考图像。第一图像采集设备3采用35mm或50mm焦距的镜头,在风洞运行时保证采集图像不过曝前提下将光圈调到最大以最大程度的接受psp辐射出的荧光。在镜头前安装650
±
10nm的带通滤光片,防止其他波段光线的干扰。依照步骤三校准测量中确定的第一图像采集设备和第一光源参数调节设备进行风洞试验,并通过图像比最终获取流场的壁面表面压力分布数据。风洞试验得到所有图像后进行数据处理。将风洞停止运行后采集的所有参考图像做平均。风洞运行采集到的图像保持时间连续性。然后用光强
‑
压力转换公式计算基于时间序列的压力数据。
[0076]
进行psp测量,获得进气道内表面压力分布特性、激波的大小、位置、激波边界层的流态发展的方法如下:
[0077]
(4.1)开启psp测量系统各设备,来流通过高超声速喷形成高超声速流场,连续采集n张吹风状态下的图像;
[0078]
关闭高超声速喷管,采集m张无风状态下的参考图像,n>>m;
[0079]
(4.2)通过图像比获取流场的壁面表面基于时间序列的压力图像序列,实现方法如下:
[0080]
计算m张参考图像上同一个像素点的平均灰度值,得到一张参考图像平均值图像;
[0081]
利用如下公式计算m张参考图像上像素点(x
i
,y
i
)的平均灰度值g;
[0082][0083]
g
m
(x
i
,y
i
)为第m张参考图像中像素点(x
i
,y
i
)的灰度值,i∈[1,i],i为图像中的像素点总数;
[0084]
第j张吹风状态下图像上每个像素点的灰度值除以平均值图像上对应像素点的灰度值,得到第j张吹风状态下的压力图像;
[0085]
j遍历[1,n],得到n个相对于时间序列的压力图像序列;
[0086]
(4.3)利用正交变换方法将压力图像序列转换为模态序列,截取前n阶模态,从前n阶模态中剔除与压力脉动无关的噪声和无效模态,将剩余与压力脉动相关的模态通过反正交变换重构得到与原来同时间分布的压力图像序列;
[0087]
利用正交变换方法将压力图像序列转换为模态序列的方法如下:
[0088]
寻找一组最佳的标准正交基;
[0089]
使压力图像序列中每个压力图像数据在该标准正交基上的投影依次递减,每个压力图像数据在该标准正交基上的投影即为模态序列。
[0090]
前n阶模态的能量之和超过总能量的90%。
[0091]
图7为pod模态分解重构得到主要压力脉动位置。
[0092]
(4.4)根据(4.3)重构得到的压力图像序列,获得每一点的压力值,从而得到压力分布特性、激波结构的大小、位置和激波边界层的流态发展。
[0093]
对于进气道构型的典型激波边界层干扰,存在唇口激波和侧壁面形成扫略激波/边界层干扰诱发侧壁面低能扫略,肩部分离形成旋涡,沿流向形成强剪切流,即角涡。采用基于psp技术的表面近似摩擦力线提取方法,对流场的ns方程进行简化,得到流场近似的压力梯度
‑
摩擦力方程。
[0094]
由ns方程:
[0095][0096]
在近壁面底层,ns方程简化为:
[0097][0098]
两端同时乘以摩擦力线方程τ=μω
×
n得:
[0099][0100]
引入涡通量ω=|ω|2/2,有:
[0101][0102]
方程中第二项为相对小量,引入边界层涡通量f
ω
,得到近似的压力梯度
‑
摩擦力方程为:
[0103][0104]
其中,ρ为密度,u为速度,t为时间,为导数,为梯度,p为压力,μ为粘性系数,为拉普拉斯算子,θ为速度的旋度,f为单位质量彻体力,z为边界层厚度方向,τ为粘性摩擦力,ω为涡量,n为单位外法向矢量,k
ω
为涡量系数。
[0105]
该方程可通过类光流方程方法进行求解,通过压力梯度解算摩擦力矢量,当边界层涡通量未知时,能求得摩擦力矢量的相对大小和方向。
[0106]
图8为表面近似摩擦力大小相对分布。
[0107]
(5)搭建piv测量系统,所述piv测量系统包括风洞、piv雾化示踪粒子发生器、高超声速喷管、缩比框架式试验模型、第二光源、第二图像采集设备以及同步触发器。
[0108]
第二光源选用yag双曝光激光器作为照明光源,采用调q技术,最大脉冲能量350mj,工作频率1~10hz,脉冲宽度6
‑
8ns,激光器出光孔处装有导光臂和集成片光源;第二图像采集设备主要由跨帧数字相机、图像采集板和计算机组成,跨帧数字相机图像分辨率2048
×
2048;同步触发器为一台延时信号发生器作为同步控制器,可同时输出6路延时信
号,控制激光器和跨帧数字相机同步工作,同步控制器采用标准ttl信号格式,延时精度0.25ns,由软件控制。激光器、导光臂和集成片光源布置在激光光源布置在风洞试验段顶部,片光通过风洞试验段顶部的光学窗口和模型顶部的光学窗口,照明缩比框架式试验模型内流场对称中心截面,跨帧数字相机从风洞试验段一侧观察窗拍摄模型内流场粒子图像。选择多点标定对拍摄平面进行校准,通过校正算法修正拍摄图像的畸变,还原真实拍摄面图像;通过piv雾化示踪粒子发生器(放在1的前端,随喷管流场一起进入风洞)降低颗粒直径提高粒子在分离区的跟随性。风洞运行时,先运行piv图像采集系统记录图像,再开启粒子发生器,捕捉粒子从无到有全过程,确保有效图像的抓取,避免图像过曝光导致的无法计算。根据抓取的图像,利用自相关算法获取流场的速度场信息和波系结构。图5为粒子图像拍摄显示结果。
[0109]
纹影试验采用双镜平行光式纹影仪(放置于窗口外侧),以平行光入射于风洞试验段,开展纹影试验,双镜平行光式纹影仪内的单反相机捕捉缩比框架式试验模型内部的密度场图像,获得进气道内层流湍流流态变化和边界层厚度。
[0110]
图6为进气道内流的波系结构及激波边界层干扰。
[0111]
图4为psp获取的表面结构和幅值与纹影对比结果。
[0112]
本发明针对进气道激波边界层干扰特性,提出一种新型的流场波系结构测量方法,通过对压缩面压敏漆表面压力测量,并对获得的光场图像转换为压力值图像,通过模态分解方法实现流场能量的重构和降噪,最终获得清晰地流场激波形状。
[0113]
采用压敏漆(pressure sensitive paint,psp)、粒子图像测速(particle image velocimetry,piv)、纹影等光学非接触测试技术能够系统的开展对超燃冲压进气道内部复杂流场的波系结构、流态变化、速度场、全场动态压力变化等多物理场参数非定常特性的全方位观测和分析,弥补数值模拟和常规风洞试验的不足,揭示内流流动机理,形成模型复杂内流场可视化测试能力,为准确判别典型激波/边界层干扰分离类别、位置、干扰区形状、流向连续特性分布及三维效应提供测量参数,为型号研制过程中进气道的设计、流动控制及改进提供原理性试验依据。
[0114]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。