1.本实用新型涉及智能制造机械手技术领域,具体为一种用于智能制造的机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.现有的智能制造机械手通常设有俩个或四个机械抓,但俩个机械抓的机械手在抓取物品时,对夹紧后,与物品的接触面积较小,时常会出现物品脱离的情况,并且现有的智能制造机械手在对玻璃制品进行抓取时,由于机械手通常是金属材料,致使玻璃制品在抓取过程中出现抓取较紧,使玻璃出现裂纹和破碎的情况,导致实用性较低。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于智能制造的机械手。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于智能制造的机械手,包括主体和气缸,所述主体内侧通过螺丝固定安装有气缸,所述主体右侧固定连接有固定杆,且固定杆右侧通过转轴活动连接有活动杆,所述活动杆右侧固定连接有第一抓手,且第一抓手顶部固定安装有电动伸缩筒,所述电动伸缩筒顶部固定连接有第二抓手,所述主体顶部通过螺丝固定安装有控制盒,所述气缸右侧活动连接有驱动杆,且驱动杆右侧设有连接块,所述连接块上下两侧焊接有固定块,且固定块外侧通过转轴活动连接有连接杆,所述连接杆另一侧通过转轴与活动杆活动连接,所述驱动杆上下两侧固定连接有限位块,所述连接块内侧固定安装有弹簧,所述连接块内侧开设有滑槽,所述限位块一侧嵌入滑槽内。
6.优选的,所述弹簧共设有俩个,所述驱动杆右侧伸入连接块左侧并与弹簧左侧固定连接。
7.优选的,所述限位块通过滑槽左右滑动。
8.优选的,所述连接块通过固定块和连接杆与活动杆连接。
9.优选的,所述第二抓手与第一抓手大小一致,且第二抓手与第一抓手平行对齐。
10.优选的,所述第一抓手和第二抓手一侧均为圆弧状。
11.优选的,所述第一抓手与第二抓手另一侧均设有橡胶层,且橡胶层一侧设有多个圆形凸点。
12.为克服背景技术中存在的问题,本使用新型提供了。具备以下有益效果:
13.(1)该用于智能制造的机械手,通过设置第一抓手、第二抓手、电动伸缩筒和橡胶层的配合使用下,当第一抓手在对物品进行抓取时,通过启动电动伸缩筒,由电动伸缩筒推动第二抓手向上移动,通过第二抓手增加对物品的接触面积,便于抓取的物品更加稳定,再由于第一抓手和第二抓手一侧均为圆弧状,在第一抓手和第二抓手抓取物品时,通过圆弧
状设置,防止第一抓手和第二抓手抓取过快或夹持过紧时,让物品有一个缓冲空间,防止对物品造成损坏,并通过橡胶层一侧设有多个圆形凸点,使第一抓手和第二抓手与物品之间的摩擦力增加,防止物品脱离,然后通过橡胶层具有柔软的特性,防止第一抓手和第二抓手在对易碎或容易变形的物品时,对物品造成损坏,提高机械手的实用性和稳定性。
14.(2)该用于智能制造的机械手,通过设置弹簧和滑槽的配合使用,当气缸推动驱动杆向右推出时,使驱动杆对连接块左侧推动,通过弹簧的弹力将气缸推动驱动杆时产生的冲击力进行减弱,提高机械手的使用寿命。
附图说明
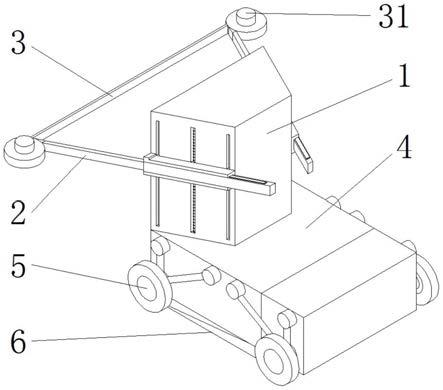
15.图1为本实用新型整体结构示意图。
16.图2为本实用新型图1中a处结构示意图。
17.图3为本实用新型第一抓手局部结构示意图。
18.图中:1
‑
主体;2
‑
气缸;3
‑
驱动杆、301
‑
限位块;4
‑
连接块、401
‑
弹簧、402
‑
滑槽;5
‑
固定杆;6
‑
活动杆;7
‑
第一抓手、701
‑
第二抓手、702
‑
电动伸缩筒、703
‑
橡胶层;8
‑
固定块、801
‑
限位轴;9
‑
连接杆、10
‑
控制盒。
具体实施方式
19.如图1
‑
3所示,本实用新型提供一种技术方案:一种用于智能制造的机械手,包括主体1和气缸2,主体1内侧通过螺丝固定安装有气缸2,主体1右侧固定连接有固定杆5,且固定杆5右侧通过转轴活动连接有活动杆6,活动杆6右侧固定连接有第一抓手7,且第一抓手7顶部固定安装有电动伸缩筒702,电动伸缩筒702顶部固定连接有第二抓手701,主体1顶部通过螺丝固定安装有控制盒10,气缸2右侧活动连接有驱动杆3,且驱动杆3右侧设有连接块4,连接块4上下两侧焊接有固定块8,且固定块8外侧通过转轴活动连接有连接杆9,连接杆9另一侧通过转轴与活动杆6活动连接,驱动杆3上下两侧固定连接有限位块301,连接块4内侧固定安装有弹簧401,连接块4内侧开设有滑槽402,限位块301一侧嵌入滑槽402内。
20.其中,弹簧401共设有俩个,驱动杆3右侧伸入连接块4左侧并与弹簧401左侧固定连接,当气缸2推动驱动杆3向右移动,并推动连接块4时,由弹簧401对气缸2推动驱动杆3产生的冲击力进行缓冲,提高机械手的使用寿命。
21.其中,限位块301通过滑槽402左右滑动,由限位块301防止驱动杆3在收缩时脱离连接块4左侧。
22.其中,连接块4通过固定块8和连接杆9与活动杆6连接,连接块4在向右移动时,通过固定块8和连接杆9带动活动杆6通过固定杆5向内移动,并将第一抓手7向内移动。
23.其中,第二抓手701与第一抓手7大小一致,且第二抓手701与第一抓手7平行对齐,便于对物品进行抓取。
24.其中,第一抓手7和第二抓手701一侧均为圆弧状,在第一抓手7和第二抓手701在物品进行抓取时,通过圆弧状设置,防止第一抓手7和第二抓手701向内移动过快或夹持过紧时,让物品有一个缓冲空间,防止对物品造成损坏。
25.其中,第一抓手7与第二抓手701另一侧均设有橡胶层703,且橡胶层703一侧设有多个圆形凸点,第一抓手7和第二抓手701对物品抓取时,通过橡胶层703增加第一抓手7和
第二抓手701与物品之间的摩擦力,防止物品在抓取过程中脱落,提高机械手抓取的稳定性。
26.使用中,首先将控制盒10通过外接电源线电连接,气缸2和电动伸缩筒702均与控制盒10通过内部电源线电连接,需要对物品进行抓取时,通过启动气缸2,由气缸2推动驱动杆3向右移动,驱动杆3在对连接块4向右推动时,固定块8和连接杆9带动活动杆6绕固定杆5转轴处向右侧展开,且通过弹簧401对气缸2和驱动杆3推动时产生的冲击力进行缓冲,提高机械手的使用寿命,然后需要抓取时,将气缸2推动驱动杆3向左收缩,使其连接块4向左移动时,通过固定块8和连接杆9带动活动杆6绕固定杆5转轴处向左侧收缩,进而带动第一抓手7向内移动夹紧,第一抓手7在对物品进行抓取时,同时启动电动伸缩筒702,由电动伸缩筒702推动第二抓手701向上移动,且通过第一抓手7和第二抓手701一侧为圆弧状,防止第一抓手7和第二抓手701向内移动过快或夹持过紧时,增加对物品的接触面积,并且让物品有一个缓冲空间,防止对物品造成损坏,最后在橡胶层703一侧设有多个圆形凸点,使其橡胶层703增加第一抓手7和第二抓手701与物品之间的摩擦力,防止物品在抓取过程中脱落,提高机械手抓取的稳定性,完成整个过程。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。