1.本实用新型属于深海取样钻机技术领域,具体是涉及一种多点位移动式深海取样钻机。
背景技术:
2.海洋蕴含着极为丰富的资源,包括了多金属结核、石油、天然气及粘土矿物等,这些资源具有极大的经济和科研探索价值。深海钻机是开展海洋资源勘探和海底工程地质勘察所必备的关键技术装备。
3.目前有非常多的单位在研究深海钻机,中国有色金属长沙勘察设计研究院有限公司研究的一种岩心取样钻机,该钻机能够实现自动化输送两种及以上尺寸的杆件和两种及以上不同直径尺寸的杆件的交替自动化抓取,整机自动化程度高。中南大学研究的一种深海岩芯钻探取样装置,该装置可以携带多根钻筒,提高了单次下海的采集样本数量,成倍提高了深海岩芯钻探取样装置的工作效率。广州海洋地质调查局提出的一种基于移动型深海取样钻机的深海取样方法,能够使深海取样钻机保持悬浮并根据图像的内容不断地调整水平方位至找到下钻点取样。但是上述所研发的钻机不能够实现取样钻机在海底自动避障和路径规划、多位置采集样品和高有效样品率。因此深海取样钻机从整体上有很大的改进空间,设计一种高自动化程度、高有效样品率的深海取样设备对海底资源勘探具有重要的意义。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供一种多点位移动式深海取样钻机,能够实现取样钻机在海底自动避障和路径规划;能够实现取样钻机在海底多个位置采集样品,提高有效样品率;更适应深海恶劣环境,提高系统的稳定性;能够实现海底底质不平的调节,提高了钻进效率。
5.本实用新型采用的技术方案是:一种多点位移动式深海取样钻机,包括视觉装置、多点位取样装置、行走车、液压装置;所述的视觉装置安装在行走车上,视觉装置包括光源、相机和镜头;所述的多点位取样装置安装在行走车的前端或后端;多点位取样装置包括液压马达a、安装座、钻杆、立杆、转接头、立柱、拧卸装置、转盘、钻头、液压马达b、底板、液压缸;所述的立杆、立柱固定安装在底板上,底板安装在行走车上;所述的转盘套在立柱上,转盘的底部设有齿轮;所述的液压马达b固定安装在底板上,液压马达b的输出轴上设有主动齿轮,主动齿轮与齿轮啮合;所述的转盘上设有多个钻头孔,每个钻头孔内插装有一个钻头,钻头的上部设有拧卸装置;所述的立杆上设有一竖直设置的滑槽,所述的安装座上设有滑块,滑块嵌装在滑槽内,滑块与液压缸的一端铰接,液压缸的另一端与底板铰接;所述的液压马达a安装在安装座上,液压马达a的输出轴连接钻杆,钻杆的下端设有转接头;所述的液压装置设有压力补偿器,液压装置与液压马达a、液压马达b及液压缸连接,视觉装置和液压装置分别与控制装置连接。
6.上述的多点位移动式深海取样钻机中,所述的行走车包括车架及底盘,所述的底盘包括履带架,履带架的两侧分别设有一组引导轮、托轮、支重轮、传动轮及一行走马达,传动轮与行走马达的输出轴连接;每组引导轮、托轮、支重轮、传动轮上包绕有一履带;所述的车架固定安装在履带架上;行走马达与液压装置连接,底板与履带架铰接。
7.上述的多点位移动式深海取样钻机中,所述的多点位取样装置还包括托盘,所述的托盘固定安装在立杆上,托盘的中心处设有钻杆孔,钻杆穿过钻杆孔。
8.上述的多点位移动式深海取样钻机中,所述的多点位取样装置还包括摆动液压缸,所述摆动液压缸一端与车架铰接,另一端与立柱的上端铰接。
9.上述的多点位移动式深海取样钻机中,所述的液压装置安装在车架后端凹槽内;车架后端设有配重块。
10.上述的多点位移动式深海取样钻机中,所述的转盘包括上环板、下环板;上环板与下环板平行设置,上环板与下环板之间通过多个筋板连接,沿圆周方向均匀分布;上环板、下环板上分别设有五个钻头孔,上环板上的五个钻头孔分别与下环板上的五个钻头孔同轴。
11.与现有技术相比,本实用新型的有益效果是:
12.1、本实用新型设有视觉装置,能够实现取样钻机在海底自动避障和路径规划。
13.2、本实用新型的转盘上设有多个钻头,能够实现取样钻机在海底多个位置采集样品,提高有效样品率;
14.3、本实用新型采用液压装置作为动力,更适应深海恶劣环境,提高系统的稳定性;
15.4、本实用新型采用多点位取样装置与摆动液压缸,能够实现海底底质不平的调节,提高了钻进效率。
附图说明
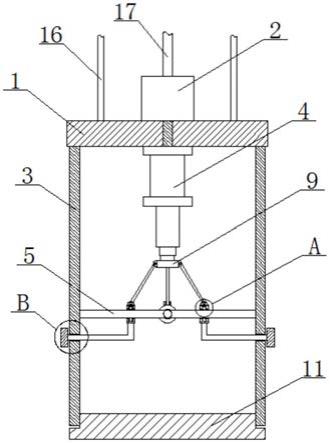
16.图1为本实用新型的结构图。
17.图2为本实用新型视觉装置与车架结构图。
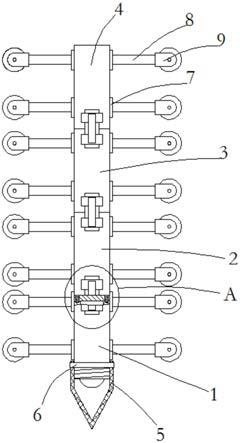
18.图3为本实用新型的多点位取样装置结构图。
19.图4为本实用新型的俯视图。
20.图5为本实用新型的液压装置布置图。
21.图6为本实用新型的主视图。
22.图7为本实用新型的左视图。
23.1—视觉装置,1
‑
1—光源,1
‑
2—镜头、相机,2—多点位取样装置,2
‑
1—液压马达a,2
‑
2—安装座,2
‑
3—钻杆,2
‑
4—立杆,2
‑
5—转接头,2
‑
6—托盘,2
‑
7—立柱,2
‑
8—拧卸装置,2
‑
9—转盘,2
‑
10—钻头,2
‑
11—液压马达b,2
‑
12—齿轮,2
‑
13—底板,2
‑
14—液压缸,2
‑
15—摆动液压缸,2
‑
16—电磁阀,3—车架,4—液压装置,4
‑
1—电器控制系统,4
‑
2—主阀,4
‑
3—主泵,4
‑
4—油箱,5—底盘,5
‑
1—引导轮,5
‑
2—履带,5
‑
3—托轮,5
‑
4—支重轮,5
‑
5—履带架,5
‑
6—传动轮,5
‑
7—行走马达。
具体实施方式
24.下面结合附图对本实用新型作进一步的说明。
25.如图1
‑
7所示,本实用新型包括视觉装置1、多点位取样装置2、液压装置4和行走车,所述的行走车包括车架3和底盘5。所述的底盘包括履带架5
‑
5,履带架5
‑
5的两侧分别设有一组引导轮5
‑
1、托轮5
‑
3、支重轮5
‑
4、传动轮5
‑
6及一行走马达5
‑
7,传动轮5
‑
6与行走马达5
‑
7的输出轴连接。每组引导轮5
‑
1、托轮5
‑
3、支重轮5
‑
4、传动轮5
‑
6上包绕有一履带5
‑
2;所述的车架3固定安装在履带架5
‑
5上;行走马达5
‑
7与液压装置4连接。
26.如图1、2所示,所述的视觉装置1安装在行走车的车架3上,视觉装置1包括光源、相机和镜头。所述视觉装置1的引入,能够实现取样钻机在海底自动避障和路径规划;所述视觉装置1安装在车架3上,光源1
‑
1、相机和镜头1
‑
2在俯仰方向均可调。
27.所述的多点位取样装置2安装在行走车的前端或后端。多点位取样装置包括液压马达a 2
‑
1、安装座2
‑
2、钻杆2
‑
3、立杆2
‑
4、转接头2
‑
5、托盘2
‑
6、立柱2
‑
7、拧卸装置2
‑
8、转盘2
‑
9、钻头2
‑
10、液压马达b 2
‑
11、齿轮2
‑
12、底板2
‑
13、液压缸2
‑
14、摆动液压缸2
‑
15和电磁阀2
‑
16;所述的立杆2
‑
4、立柱2
‑
7固定安装在底板上,底板2
‑
13与履带架5
‑
5前端铰接。所述摆动液压缸2
‑
15一端与车架3铰接,另一端与立柱2
‑
7的上端铰接,用于缓解取样钻机工作过程中的摆动。所述的转盘2
‑
9包括上环板、下环板;上环板与下环板平行设置,上环板与下环板之间通过多个筋板连接,沿圆周反向均匀分布。上环板、下环板上分别设有五个钻头孔,上环板上的五个钻头孔分别与下环板上的五个钻头孔同轴。所述的转盘2
‑
9套在立柱2
‑
7上,转盘2
‑
9的底部设有齿轮2
‑
12;所述的液压马达b 2
‑
11固定安装在底板2
‑
13上,液压马达b2
‑
11的输出轴上设有主动齿轮,主动齿轮与齿轮2
‑
12啮合。所述的转盘2
‑
9上的每个钻头孔内插装有一个钻头,钻头的上部设有拧卸装置2
‑
8;拧卸装置2
‑
8用于拧紧与松开钻头2
‑
10与转接头2
‑
5的连接,拧紧与松开通过电磁阀2
‑
16。所述的立杆2
‑
4上设有一竖直设置的滑槽,所述的安装座2
‑
2上设有滑块,滑块嵌装在滑槽内,滑块与液压缸2
‑
14的一端铰接,液压缸2
‑
14的另一端与底板铰接。所述的托盘2
‑
6固定安装在立杆2
‑
4上,托盘2
‑
6位于转盘2
‑
9上方。所述的液压马达a2
‑
1安装在安装座2
‑
2上,液压马达a2
‑
1的输出轴连接钻杆2
‑
3,钻杆的下端穿过托盘2
‑
6中心处的圆孔连接转接头2
‑
5。所述的液压装置4设有压力补偿器,液压装置4与液压马达a2
‑
1、液压马达b及液压缸2
‑
14连接。视觉装置1和液压装置4分别与控制装置连接。
28.转盘2
‑
9的回转是通过液压马达b2
‑
11上的主动齿轮带动齿轮2
‑
12转动,使得转盘2
‑
9绕立柱2
‑
7作圆周运动,每次回转一定角度,此时拧卸装置2
‑
8夹持的钻头刚好在托盘2
‑
6中圆孔正下方。钻机工作过程中,将通过摆动液压缸2
‑
15进行调节缓冲。如图2和图6所示,所述车架3固定安装在底盘5的履带架5
‑
5上,车架3采用型材搭建而成。如图5所示,所述的液压装置4安装在车架3后端凹槽内。车架后端设有配重块。
29.本实用新型的工作原理如下:本实用新型通过脐带缆下放到海底,通过视觉装置1进行自动避障,同时实现路径规划。当寻找到取样地点时,拧卸装置2
‑
8松开钻头,多点位取样装置2开始钻探取样,此时液压马达a2
‑
1回转,同时液压缸2
‑
14工作,取样完毕,拧卸装置2
‑
8夹紧钻头,在液压马达a2
‑
1和液压缸2
‑
14的作用下使得钻杆2
‑
3与钻头2
‑
10脱离,完成第一个位置的钻探取样。接着在视觉装置1的作用下继续寻找第二个取样位置完成上述步骤,直到完成第五个位置的取样。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。