1.本发明涉及一种沥青滚平机。
背景技术:
2.以往,已知有具备相对于前侧整平机能够向左右方向伸缩的后侧整平机的沥青滚平机(参考专利文献1。)。该沥青滚平机能够通过使后侧整平机伸长来扩大所铺设的道路的宽度。
3.以往技术文献
4.专利文献
5.专利文献1:日本特开2017
‑
160636号公报
技术实现要素:
6.发明要解决的技术课题
7.然而,当相对于铺设铺路材料的预定区域(以下,称为“铺装预定区域”。)机身被配置于不适当的位置时,上述沥青滚平机可能会导致铺装施工的工作效率降低。不适当的位置例如为离铺装预定区域的端部近的位置,即从铺装预定区域的中心偏离的位置。
8.例如,在沿行进方向笔直延伸的铺装预定区域的最终部分,在铺装预定区域的左端存在加宽部的情况下,当在开始铺装时机身配置于离铺装预定区域的右端近的位置时,沥青滚平机即便向左侧最大限度地伸长后侧整平机,也无法覆盖其加宽部的整个区域,从而可能会无法铺装其加宽部的边缘部。此时,未通过沥青滚平机100进行铺装的边缘部,需要由工作人员通过手动工作来进行铺装。这会引起铺装施工的工作效率的降低。
9.因此,希望提供一种能够通过机身的适当配置来提高铺装施工的工作效率的沥青滚平机。
10.用于解决技术课题的手段
11.本发明的实施方式所涉及的沥青滚平机具备:牵引机;料斗,设置于所述牵引机的前侧并容纳铺路材料;输送机,将所述料斗内的铺路材料供给至所述牵引机的后侧;螺杆,在所述牵引机的后侧铺展由所述输送机供给的铺路材料;整平机,在所述螺杆的后侧压实通过所述螺杆铺展的铺路材料;信息获取装置,获取与被铺设的道路相关的信息;及控制装置,所述控制装置根据所述信息获取装置所获取的信息,支援将所述牵引机的中心与铺装预定区域的中心对齐的操作。
12.发明的效果
13.上述本发明的实施方式所涉及的沥青滚平机,能够通过机身的适当配置来提高铺装施工的工作效率。
附图说明
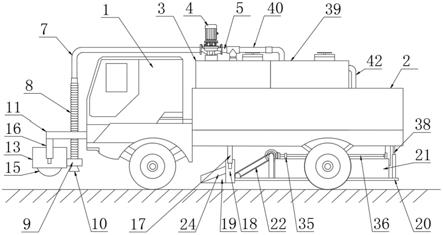
14.图1是本发明的实施方式所涉及的沥青滚平机的侧视图。
15.图2是图1的沥青滚平机的俯视图。
16.图3是表示工作支援系统的结构例的图。
17.图4a是铺装现场的俯视图。
18.图4b是铺装现场的俯视图。
19.图4c是铺装现场的俯视图。
20.图5是表示进行配置支援处理时显示的画面的显示例的图。
21.图6a是另一铺装现场的俯视图。
22.图6b是另一铺装现场的俯视图。
23.图6c是另一铺装现场的俯视图。
24.图7是表示工作支援系统的另一结构例的图。
25.图8a是又一铺装现场的俯视图。
26.图8b是又一铺装现场的俯视图。
具体实施方式
27.图1是本发明的实施方式所涉及的道路机械的一例即沥青滚平机100的侧视图。图2是沥青滚平机100的俯视图。沥青滚平机100主要由牵引机1、料斗2及整平机3构成。以下,将从牵引机1观察的料斗2的方向( x方向)设为前方,将从牵引机1观察的整平机3的方向(
‑
x方向)设为后方。道路机械可以是基层摊铺机、接缝摊铺机或多功能沥青摊铺机等。
28.牵引机1为用于使沥青滚平机100移动的机构。在本实施方式中,牵引机1具备包括后侧行走用液压马达59b及前侧行走用液压马达59f的行走用马达59。具体而言,牵引机1使用后侧行走用液压马达59b而使后轮5旋转,且使用前侧行走用液压马达59f而使前轮6旋转,以使沥青滚平机100移动。后侧行走用液压马达59b及前侧行走用液压马达59f从液压泵接收工作油的供给而进行旋转。可以用履带来替换后轮5及前轮6。行走用马达可以是电动马达。
29.控制器50为控制沥青滚平机100的控制装置。在本实施方式中,控制器50由包括cpu、易失性存储装置及非易失性存储装置等的微型计算机构成,且搭载于牵引机1。cpu执行存储于非易失性存储装置的程序,由此实现基于控制器50的各功能。但是,控制器50的各功能可以通过硬件或固件来实现。
30.料斗2为用于容纳铺路材料的机构。在本实施方式中,料斗2设置于牵引机1的前侧,且构成为能够通过料斗缸而在车宽度方向(y轴方向)上开闭。通常,沥青滚平机100使料斗2处于全开状态而从自卸车的货箱接收铺路材料。铺路材料例如为沥青混合物。自卸车为运输铺路材料的运输车辆的一例。图1及图2表示料斗2处于全开状态。通常,沥青滚平机100的操作者为,若料斗2内的铺路材料减少则关闭料斗2,并且将存在于料斗2的内壁附近的铺路材料集中到料斗2的中央部。这是为了能够通过存在于料斗2中央部的输送机cv向牵引机1的后侧供给铺路材料。在牵引机1的后侧且在整平机3的前侧,通过螺杆sc将供给至牵引机1后侧的铺路材料向车宽度方向铺展。在本实施方式中,螺杆sc处于在左右连结有延长螺杆的状态。
31.整平机3为用于铺平铺路材料pv的机构。在本实施方式中,如图2所示,整平机3包括前侧整平机30及后侧整平机31。前侧整平机30包括左前侧整平机30l及右前侧整平机
30r。后侧整平机31包括左后侧整平机31l及右后侧整平机31r。整平机3为由牵引机1牵引的浮动整平机,并且经由调平臂3a与牵引机1连结。
32.在本实施方式中,后侧整平机31构成为能够通过伸缩缸28向车宽度方向伸缩。具体而言,左后侧整平机31l通过左伸缩缸28l向车宽度方向伸缩,右后侧整平机31r通过右伸缩缸28r向车宽度方向伸缩。即,左后侧整平机31l及右后侧整平机31r能够彼此独立地伸缩。但是,后侧整平机31可以是使用起重机等在使用时连结的能够装卸的固定式(非伸缩式)整平机。并且,后侧整平机31可以是两档伸缩式整平机等多档伸缩式整平机。
33.在整平机3的前部安装有造型板43。造型板43构成为能够调整滞留于整平机3前方的铺路材料pv的量。铺路材料pv通过造型板43的下端与路基bs之间的间隙而到达后侧整平机31的前方。
34.在牵引机1中安装有信息获取装置51。信息获取装置51构成为能够获取与道路的铺装相关的信息,并且将所获取的信息输出至控制器50。与道路的铺装相关的信息包括与新设铺装体相关的信息、与未设铺装体相关的信息及与环境(例如天气等)相关的信息等中的至少一个。在本实施方式中,信息获取装置51包括前方监视装置51f及后方监视装置51b。
35.前方监视装置51f构成为能够监视沥青滚平机100的前方。在本实施方式中,前方监视装置51f为将存在于牵引机1前方的空间设为监视范围rf的相机,且安装于牵引机1的上表面的前端中央部。但是,前方监视装置51f也可以以能够监视沥青滚平机100前方的方式安装于沥青滚平机100的其他部位。
36.后方监视装置51b构成为能够监视沥青滚平机100的后方。在本实施方式中,后方监视装置51b为将存在于整平机3后方的空间设为监视范围rb的相机,且安装于作为用于沥青滚平机100的操作者的扶手发挥作用的导轨1g。但是,后方监视装置51b也可以以能够监视沥青滚平机100的后方的方式,安装于驾驶座1s的下部,也可以安装于沥青滚平机100的其他部位。
37.前方监视装置51f及后方监视装置51b中的至少一个可以是lidar、立体摄像机、激光雷达、毫米波雷达、激光扫描器、深度摄像机或激光测距仪等装置,也可以是该装置与摄像机的组合。
38.前方监视装置51f的监视范围rf优选包括料斗2内侧的空间及料斗2前方的空间。在料斗2前方的空间优选包括路基bs及存在于路基bs外侧的地上物ap。其目的在于,即使在路基bs上铺设了新设铺装体np之后,也能够导出路基bs的表面相对于未被新设铺装体np覆盖的地上物ap上的规定点的高度(深度)。并且,为了导出作为铺装预定区域的路基bs的宽度。在本实施方式中,监视范围rf具有比作为铺装预定区域的路基bs的宽度大的宽度。地上物ap为路缘石。地上物ap只要是能够利用于确定铺装预定区域的宽度的地上物,则也可以是已设铺装体、l型侧槽块或木框等路缘石以外的其他地上物。
39.后方监视装置51b的监视范围rb优选包括新设铺装体np及存在于新设铺装体np外侧的地上物ap。这是为了导出新设铺装体np的表面相对于未被新设铺装体np覆盖的地上物ap上的规定点的高度。在本实施方式中,监视范围rb具有比新设铺装体np的宽度大的宽度。
40.前方监视装置51f可以包括定位装置及惯性测量装置。这是为了检测前方监视装置51f的位置及姿势。定位装置例如为gnss接收机。关于后方监视装置51b也相同。
41.信息获取装置51可以包括构成为能够检测沥青滚平机100的位置的定位装置、构
成为能够检测沥青滚平机100的操舵角的操舵角传感器及构成为能够检测后侧整平机31的伸长量而计算铺装宽度的铺装宽度传感器等。
42.显示装置52构成为能够显示与沥青滚平机100相关的信息。在本实施方式中,显示装置52为设置于驾驶座1s前方的液晶显示器。但是,显示装置52可以设置于整平机3的左端部及右端部中的至少一个端部。
43.通信装置53构成为能够控制沥青滚平机100与存在于沥青滚平机100外部的设备之间的通信。在本实施方式中,通信装置53设置于驾驶座1s的前方,且构成为能够控制经由移动电话通信网、近距离无线通信网或卫星通信网等的通信。
44.操舵装置54为用于沥青滚平机100的操舵的输入装置。在本实施方式中,操舵装置54为设置于驾驶座1s前方的方向盘。但是,操舵装置54可以是设置于驾驶座1s前方的转向杆。当作为行走装置具备履带时,典型地,沥青滚平机100作为操舵装置54具备转向杆。
45.行走转盘55为用于调整沥青滚平机100的移动速度的输入装置。在本实施方式中,行走转盘55由电位差计构成,且设置于驾驶座1s的前方。但是,可以利用由单轴杆构成的行走杆等来进行沥青滚平机100的移动速度的调整。
46.行走速度传感器56构成为能够检测沥青滚平机100的行走速度。在本实施方式中,行走速度传感器56为车轮速度传感器,且构成为能够检测后轮5的旋转角速度及旋转角度,进而能够检测沥青滚平机100的行走速度及行走距离。
47.声音输出装置57构成为能够听觉性输出与沥青滚平机100相关的信息。在本实施方式中,声音输出装置57为设置于驾驶座1s前方的扬声器。
48.操舵用马达58构成为能够辅助操作者对操舵装置54的手动操作。操舵用马达58可以构成为能够与有无由操作者进行的手动操作无关地驱动操舵装置54。在本实施方式中,操舵用马达58为利用液压泵所吐出的工作油进行动作的液压马达(摆线转子马达)。具体而言,液压马达使设置于前轮的轮轴的左右一对液压缸伸缩而改变前轮的操舵角。另外,操舵装置54可以是能够对设置于将液压马达与左右一对液压缸分别连结的管路上的2个转换阀进行开闭的按键式操舵开关。此时,操作者通过按下操舵开关能够改变操舵角。
49.但是,操舵用马达58也可以是根据操作者对操舵装置54的手动操作,或根据来自控制器50的控制指令进行动作的电动马达。
50.并且,沥青滚平机100的操舵可以通过使左侧的车轮或履带的旋转速度与右侧的车轮或履带的旋转速度不同来实现。
51.接着,参考图3对搭载于沥青滚平机100的工作支援系统ds的结构例进行说明。图3是表示工作支援系统ds的结构例的图。
52.工作支援系统ds主要由控制器50、前方监视装置51f、后方监视装置51b、显示装置52、通信装置53、操舵装置54、行走转盘55、行走速度传感器56、声音输出装置57、操舵用马达58、前侧行走用液压马达59f及后侧行走用液压马达59b等构成。作为担负沥青滚平机100的一部分功能的功能要件,控制器50包括运算部50a及操作支援部50b。为了便于说明而区别示出了运算部50a及操作支援部50b,但也可以无需物理性地区别,而整体性或局部性地由共同的软件构件或硬件构件构成。
53.运算部50a构成为导出沥青滚平机100的控制中所利用的信息。在本实施方式中,运算部50a构成为能够导出铺装预定区域的中心线的位置。
54.运算部50a例如根据前方监视装置51f的输出,检测对作为铺装预定区域的路基bs(参考图2。)的边界进行规定的地上物ap(参考图2。)。具体而言,运算部50a检测对路基bs的右侧(
‑
y侧)边界进行规定的右侧地上物ap1及对路基bs的左侧( y侧)边界进行规定的左侧地上物ap2。而且,运算部50a计算右侧地上物ap1与左侧地上物ap2之间的车宽度方向(y轴方向)上的距离,作为铺装预定区域的路基bs的宽度。而且,运算部50a导出穿过具有计算出的宽度的路基bs的中央的线,作为铺装预定区域的中心线。
55.并且,运算部50a构成为能够导出沥青滚平机100的机身的中心线的位置。在本实施方式中,沥青滚平机100的机身的中心线为牵引机1的中心线。
56.运算部50a例如根据在监视范围内包括料斗2的内部空间的前方监视装置51f的输出,检测料斗2的内部形状。而且,运算部50a根据检测到的料斗2的内部形状,导出料斗2的中心线作为牵引机1的中心线。
57.在本实施方式中,运算部50a使用以作为前方监视装置51f的摄像机为中心的局部坐标系,表示铺装预定区域的中心线的位置及牵引机1的中心线的位置。具体而言,运算部50a使用局部坐标系中的2个以上的坐标点,表示铺装预定区域的中心线的位置及牵引机1的中心线的位置。
58.操作支援部50b构成为能够支援操作者对沥青滚平机100的操作。在本实施方式中,操作支援部50b将运算部50a所导出的铺装预定区域的中心线与牵引机1的中心线之间的关系提示给操作者,由此支援操作者对沥青滚平机100的配置工作。
59.沥青滚平机100的配置工作为,在开始铺装施工之前,用于相对于铺装预定区域将沥青滚平机100配置于适当位置的工作。典型地,该配置工作伴随使用了操舵装置54的操舵及使用了行走转盘55的沥青滚平机100的移动。
60.在本实施方式中,操作支援部50b将作为前方监视装置51f的摄像机所拍摄的图像(以下,称为“摄像机图像”。)显示于显示装置52。而且,操作支援部50b将表示铺装预定区域的中心线的图形(线图像)及表示牵引机1的中心线的图形(线图像)重叠显示于摄像机图像上。这是为了使操作者能够直观地识别铺装预定区域的中心线与牵引机1的中心线之间的偏移(以下,称为“中心偏移”。)的大小。并且,这是为了使操作者能够直观地识别是在牵引机1的中心线的右侧存在铺装预定区域的中心线,还是在牵引机1的中心线的左侧存在铺装预定区域的中心线。
61.操作支援部50b可以构成为听觉性地支援操作者对沥青滚平机100的配置工作。例如,操作支援部50b可以从声音输出装置57输出与中心偏移的大小相对应的间歇音。此时,操作支援部50b也可以为,中心偏移的大小越大则使间歇音的间隔越长。并且,操作支援部50b也可以在中心偏移的大小成为零时,即铺装预定区域的中心线与牵引机1的中心线一致时输出连续音。
62.操作支援部50b也可以使沥青滚平机100自主地或半自主地移动,以使铺装预定区域的中心线与牵引机1的中心线一致。自主的移动是指与由操作者进行的手动操作无关地使沥青滚平机100移动的情况。半自主的移动指示通过由操作者进行的手动操作与由控制器50进行的自动操作的组合来使沥青滚平机100移动的情况。例如,半自主的移动包括通过操作者对行走转盘55的手动操作与控制器50对操舵装置54的自动操作的组合来使沥青滚平机100移动。
63.在进行自主的移动或半自主的移动时,运算部50a可以根据铺装预定区域的中心线的位置及牵引机1的中心线的位置导出目标轨道。目标轨道为操作支援部50b使沥青滚平机100自主地或半自主地移动时沥青滚平机100追随的轨道。
64.操作支援部50b使操舵用马达58、前侧行走用液压马达59f及后侧行走用液压马达59b中的至少一个工作,由此实现沥青滚平机100的自主的移动或半自主的移动。
65.接着,参考图4a、图4b、图4c及图5对控制器50支援沥青滚平机100的配置工作的处理(以下,称为“配置支援处理”。)的具体例进行说明。图4a~图4c为铺装现场的俯视图。图5表示在执行配置支援处理时显示于显示装置52的画面的显示例。
66.具体而言,图4a表示开始配置支援处理之前的铺装现场的状态。配置支援处理例如在按下了规定的按钮时开始。图4b表示通过开始配置支援处理而沥青滚平机100自主地前进从而铺装预定区域的中心线与牵引机1的中心线一致时的铺装现场的状态。图4c表示沥青滚平机100自主地后退至铺装工作开始位置时的铺装现场的状态。在图4a~图4c中,以斜线阴影线来表示铺装预定区域。
67.首先,若按下规定的按钮,则控制器50开始配置支援处理。具体而言,如图4所示,控制器50的运算部50a根据在监视范围rf内包括料斗2的内部空间的前方监视装置51f的输出,检测料斗2的内部形状。而且,运算部50a根据检测到的料斗2的内部形状,导出料斗2的中心线而作为牵引机1的中心线l0。
68.并且,运算部50a根据前方监视装置51f的输出,检测对铺装预定区域的右侧(
‑
y侧)边界进行规定的右侧地上物ap1及对铺装预定区域的左侧( y侧)边界进行规定的左侧地上物ap2。而且,运算部50a计算右侧地上物ap1与左侧地上物ap2之间的车宽度方向(y轴方向)上的距离即宽度w1,作为铺装预定区域的宽度。而且,运算部50a导出穿过具有计算出的宽度w1的铺装预定区域的中央的线,作为铺装预定区域的中心线l1。即,运算部50a在距地上物ap1为距离w1/2且距地上物ap2为距离w1/2的位置上设定中心线l1。
69.如此,运算部50a在导出牵引机1的中心线l0及铺装预定区域的中心线l1之后计算中心偏移的值gp1。
70.此时,如图5所示,操作支援部50b将牵引机1的中心线l0与铺装预定区域的中心线l1之间的关系显示于显示装置52。图5的画面包括图形g1~图形g4。在图5所示的例中,图形g1~图形g4重叠显示于摄像机图像上。图形g1为表示牵引机1的中心线l0的线段。图形g2为表示铺装预定区域的中心线l1的线段。图形g3为表示中心偏移的大小的箭头。箭头的长度与中心偏移的大小对应。朝左的箭头表示在牵引机1的中心线l0的左侧存在铺装预定区域的中心线l1。操作支援部50b可以将中心偏移的值gp1与箭头一同显示。图形g4为分别强调运算部50a导出铺装预定区域的中心线l1时检测到的地上物ap1及地上物ap2的图形。通过观察图形g4,操作者能够判断是否适当地导出了铺装预定区域的中心线l1。
71.然后,运算部50a根据计算出的中心偏移的值gp1导出目标轨道tr。在本实施方式中,目标轨道tr包括使沥青滚平机100如图4b所示那样前进时所利用的目标轨道tr1、及使沥青滚平机100如图4c所示那样后退时所利用的目标轨道tr2。在本实施方式中,目标轨道tr设定为沥青滚平机100的后轮5追随的轨道。
72.操作支援部50b通过使操舵用马达58、前侧行走用液压马达59f及后侧行走用液压马达59b工作,由此如箭头ar1所示,使沥青滚平机100沿图4b的粗点线所示的目标轨道tr1
前进。图4b中的被虚线包围的范围100p表示沥青滚平机100开始前进之前的沥青滚平机100的位置。在该例子中,操作支援部50b使沥青滚平机100前进,直至牵引机1的中心线l0与铺装预定区域的中心线l1一致为止。
73.然后,操作支援部50b使操舵用马达58、前侧行走用液压马达59f及后侧行走用液压马达59b工作,如箭头ar2所示,使沥青滚平机100沿图4c的粗点线所示的目标轨道tr2后退。图4c中的被虚线包围的范围100p表示沥青滚平机100开始后退之前的沥青滚平机100的位置。在该例子中,操作支援部50b使沥青滚平机100后退,直至沥青滚平机100到达铺装工作开始位置为止。
74.然后,操作支援部50b一边监视铺装宽度传感器的输出,一边使伸缩缸28自动地伸长,直至与铺装预定区域的宽度一致为止。图4c示出了后侧整平机31伸长至与铺装预定区域的宽度一致的状态的沥青滚平机100。在该例子中,操作支援部50b能够使左后侧整平机31l的伸长量与右后侧整平机31r的伸长量大致相同。
75.如此,控制器50通过执行配置支援处理,在开始铺装施工时,能够将沥青滚平机100自动地配置于适当的位置。然后,沥青滚平机100在料斗2内容纳铺路材料并通过输送机cv将铺路材料供给至牵引机1的后侧,且通过螺杆sc向车宽度方向铺展铺路材料的基础上,开始用于铺装的前进。
76.接着,参考图6a~图6c对配置支援处理的另一具体例进行说明。图6a~图6c是铺装现场的俯视图。在图6a~图6c的例子中,铺装预定区域包括加宽部wd。图6a~图6c中,以交叉阴影线示出加宽部wd。加宽部wd例如为形成于公交车站的位置的部分。
77.若按下规定的按钮,则控制器50开始配置支援处理。导出牵引机1的中心线l0的方法、计算不包括加宽部wd的铺装预定区域的宽度w1的方法及导出不包括加宽部wd的铺装预定区域的中心线l1的方法与图4a~图4c的情况相同。
78.在图6a~图6c的例子中,控制器50代替不包括加宽部wd的铺装预定区域的中心线l1,使包括加宽部wd的铺装预定区域的中心线l2与牵引机1的中心线l0一致。
79.如图6a所示,运算部50a根据前方监视装置51f的输出,检测对包括加宽部wd的铺装预定区域的右侧(
‑
y侧)边界进行规定的右侧地上物ap3、及对包括加宽部wd的铺装预定区域的左侧( y侧)边界进行规定的左侧地上物ap4。而且,运算部50a计算右侧地上物ap3与左侧地上物ap4之间的车宽度方向(y轴方向)上的距离即宽度w2,作为包括加宽部wd的铺装预定区域的宽度。而且,运算部50a导出穿过具有计算出的宽度w2的铺装预定区域的中央的线,作为包括加宽部wd的铺装预定区域的中心线l2。即,运算部50a在距地上物ap3为距离w2/2且距地上物ap4为距离w2/2的位置上设定中心线l2。
80.而且,运算部50a在导出牵引机1的中心线l0及包括加宽部wd的铺装预定区域的中心线l2之后计算中心偏移的值gp2。而且,运算部50a根据计算出的中心偏移的值gp2导出目标轨道tr。
81.图6b表示假设控制器50在配置支援处理中在使牵引机1的中心线l0与不包括加宽部wd的宽度w1的铺装预定区域的中心线l1一致了的情况下进行的铺装施工的情况。
82.图6b中的虚线l3示出了右后侧整平机31r最大限度地伸长时的右后侧整平机31r的右端位置,即右侧最大铺装宽度rmax的右端位置。同样地,图6b中的虚线l4示出了左后侧整平机31l最大限度地伸长时的左后侧整平机31l的左端位置,即左侧最大铺装宽度lmax的
左端位置。而且,图6b中的虚线l5示出了加宽部wd的左端位置。
83.从图6b明确可知,当在使牵引机1的中心线l0与铺装预定区域的中心线l1一致了的状态开始了铺装时,沥青滚平机100无法铺装加宽部wd的边缘部ed。这是因为,沥青滚平机100即便将左后侧整平机31l最大限度地伸长,对于覆盖加宽部wd的整个区域来说,伸长量不足与距离sh相当的量。
84.因此,在图6c的例子中,控制器50在配置支援处理中,使牵引机1的中心线l0与包括加宽部wd的宽度w2的铺装预定区域的中心线l2一致,而不是使其与不包括加宽部wd的宽度w1的铺装预定区域的中心线l1一致。即,控制器50在配置支援处理中,事先使沥青滚平机100的配置向加宽部wd侧偏置,由此防止导致左后侧整平机31l的伸长量不足。
85.图6c表示控制器50在配置支援处理中在使牵引机1的中心线l0与包括加宽部wd的宽度w2的铺装预定区域的中心线l2一致了的情况下进行的铺装施工的情况。
86.从图6c明确可知,当在使牵引机1的中心线l0与包括加宽部wd的铺装预定区域的中心线l2一致了的状态下开始了铺装时,沥青滚平机100能够铺装加宽部wd的边缘部ed。这是因为,沥青滚平机100能够使左后侧整平机31l伸长至从加宽部wd的边缘部远离距离mg的位置。
87.在图6c的例子中,控制器50为,当左后侧整平机31l的后端到达箭头ar3所示的地点或其附近时,开始左后侧整平机31l的伸长,当左后侧整平机31l的后端到达箭头ar4所示的地点或其附近时,停止左后侧整平机31l的伸长。然后,控制器50为,当左后侧整平机31l的后端到达箭头ar5所示的地点或其附近时,开始左后侧整平机31l的收缩,当左后侧整平机31l的后端到达箭头ar6所示的地点或其附近时,停止左后侧整平机31l的收缩。
88.另外,在图6c的例子中,控制器50通过对作为前方监视装置51f的摄像机所拍摄的图像实施图像处理,由此导出包括加宽部wd的宽度w2的铺装预定区域的中心线l2。然而,控制器50可以构成为,根据存储于非易失性存储装置的设计数据及定位装置所获取的沥青滚平机100的位置信息来导出中心线l2。此时,控制器50例如即使在通过摄像机无法拍摄那样的远方存在加宽部wd的情况下,也能够适当地导出中心线l2。
89.接着,参考图7对搭载于沥青滚平机100的工作支援系统ds的另一结构例进行说明。图7是表示工作支援系统ds的结构例的图。
90.图7的工作支援系统ds与图3的工作支援系统ds的主要不同点在于,具备作为信息获取装置51发挥作用的定位装置60,以及,构成为操作支援部50b不仅在开始铺装施工之前的配置工作中而且在开始铺装施工之后的铺装工作中也能够支援操作者对沥青滚平机100的操作。但是,在其他方面,图7的工作支援系统ds与图3的工作支援系统ds相同。因此,以下,省略共同部分的说明,对不同部分进行说明。
91.定位装置60构成为能够检测沥青滚平机100的位置。在本实施方式中,定位装置60为gnss接收机。沥青滚平机100的位置使用基准坐标系来表现。即,沥青滚平机100的位置通过基准坐标系中的坐标来确定。基准坐标系例如为世界大地坐标系。世界大地坐标系为在地球的重心放置原点,在格林威治子午线与赤道的交点的方向上取x轴,在东经90度的方向上取y轴,而且在北极的方向上取z轴的三维直角xyz坐标系。
92.并且,在图7的例子中,控制器50构成为通过存储卡读卡器等输入装置或通信装置53等获取与铺装预定区域相关的信息。与铺装预定区域相关的信息例如为道路的设计数
据,包括铺装预定区域的宽度、总长度、形状以及与加宽部wd的位置及大小等相关的信息。与沥青滚平机100的位置同样地,与铺装预定区域相关的信息使用基准坐标系来表现。
93.操作支援部50b构成为根据与铺装预定区域相关的信息,在铺装工作中,即在沥青滚平机100的前进中,导出沥青滚平机100的中心点追随的目标轨道tr。
94.而且,操作支援部50b根据定位装置60检测到的沥青滚平机100的位置,使操舵用马达58、前侧行走用液压马达59f及后侧行走用液压马达59b中的至少一个工作,使沥青滚平机100沿目标轨道tr移动。
95.并且,操作支援部50b根据铺装预定区域的宽度方向上的牵引机1的中心线l0的移动,改变左后侧整平机31l及右后侧整平机31r各自的伸缩量。这是为了使整平机3能够覆盖铺装预定区域的整个宽度。具体而言,操作支援部50b使左伸缩缸28l伸缩而改变左后侧整平机31l的伸缩量,且使右伸缩缸28r伸缩而改变右后侧整平机31r的伸缩量。
96.根据该结构,操作支援部50b例如即使在如图6b所示那样的状况下,也能够在铺装工作中使沥青滚平机100沿车宽度方向移动,以便能够适当地铺装包括加宽部wd的铺装预定区域。即,如图6b所示,即使在继续沥青滚平机100的直进时,在即便将左后侧整平机31l最大限地伸长也无法铺装加宽部wd等的状况下,操作支援部50b也能够通过在铺装工作中使沥青滚平机100接近铺装预定区域的左端,由此适当地铺装加宽部wd。
97.而且,操作支援部50b能够与由操作者进行的手动操作无关地,使沥青滚平机100接近铺装预定区域的左端,且能够适当地改变左右后侧整平机31的伸缩量。因此,操作者能够执行其他工作,而不会受到沥青滚平机100的操舵及左右后侧整平机31的伸缩等工作的干扰。
98.另外,在图7的例子中,操作支援部50b根据通过输入装置或通信装置53获取的与铺装预定区域相关的信息导出目标轨道tr,但也可以根据前方监视装置51f的输出导出目标轨道tr。
99.并且,在图7的例子中,操作支援部50b构成为使沥青滚平机100沿车宽度方向自主地移动,但也可以构成为使用声音、光及振动中的至少一个来支援用于使沥青滚平机100沿车宽度方向移动的由操作者进行的手动操作。
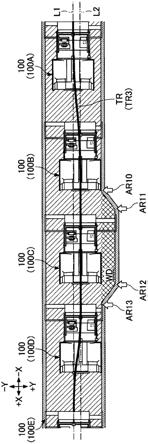
100.接着,参考图8a及图8b对控制器50支援由沥青滚平机100进行的铺装工作的处理(以下,称为“铺装支援处理”。)的具体例进行说明。图8a及图8b是铺装现场的俯视图。具体而言,图8a及图8b示出了在配置支援处理中,使牵引机1的中心线l0与不包括加宽部wd的宽度w1的铺装预定区域的中心线l1一致时进行的铺装施工的情况。更具体而言,图8a及图8b示出了作为以适当地铺装加宽部wd的方式在沥青滚平机100的行走中一边改变左右后侧整平机31的伸缩量一边使牵引机1的中心线l0沿车宽度方向移动的处理的铺装支援处理的2个具体例。
101.图8a示出了使牵引机1的中心线l0较缓慢地移动时的铺装施工的情况。图8b示出了使牵引机1的中心线l0较快地移动时的铺装施工的情况。
102.图8a及图8b分别示出了沥青滚平机100按照地点ta、tb、tc、td及te的顺序从
‑
x侧向 x侧行进的情况。并且,在图8a及图8b中,沥青滚平机100a示出了地点ta处的沥青滚平机100的情况,沥青滚平机100b示出了地点tb处的沥青滚平机100的情况,沥青滚平机100c示出了地点tc处的沥青滚平机100的情况,沥青滚平机100d示出了地点td处的沥青滚平机100
的情况,沥青滚平机100e示出了地点te处的沥青滚平机100的情况。
103.在图8a的例子中,控制器50的操作支援部50b为,当按下规定的按钮时,开始铺装支援处理,并导出目标轨道tr3。
104.目标轨道tr3为前侧整平机30的后端中央部追随的轨道。目标轨道tr3设定为,当沥青滚平机100位于地点ta时,前侧整平机30的后端中央部位于中心线l1上,当沥青滚平机100位于地点tb时,前侧整平机30的后端中央部位于中心线l2上,当沥青滚平机100位于地点tc时,前侧整平机30的后端中央部位于中心线l2上。并且,目标轨道tr3设定为,当沥青滚平机100位于地点td时,前侧整平机30的后端中央部位于中心线l2上,当沥青滚平机100位于地点te时,前侧整平机30的后端中央部位于中心线l1上。
105.控制器50以使前侧整平机30的后端中央部沿目标轨道tr3移动的方式使沥青滚平机100移动。
106.并且,当沥青滚平机100位于地点ta时,控制器50开始左后侧整平机31l的收缩及右后侧整平机31r的伸长,当沥青滚平机100到达地点tb时,结束左后侧整平机31l的收缩及右后侧整平机31r的伸长。
107.然后,当左后侧整平机31l的后端到达箭头ar10所示的地点或其附近时,控制器50开始左后侧整平机31l的伸长,当左后侧整平机31l的后端到达箭头ar11所示的地点或其附近时,结束左后侧整平机31l的伸长。并且,当左后侧整平机31l的后端到达箭头ar12所示的地点或其附近时,控制器50开始左后侧整平机31l的收缩,当左后侧整平机31l的后端到达箭头ar13所示的地点或其附近时,结束左后侧整平机31l的收缩。另一方面,控制器50不会使右后侧整平机31r伸缩,直至沥青滚平机100到达地点td。
108.然后,当沥青滚平机100到达地点td时,控制器50开始左后侧整平机31l的伸长及右后侧整平机31r的收缩,当沥青滚平机100到达地点te时,结束左后侧整平机31l的伸长及右后侧整平机31r的收缩。
109.在图8b的例子中,控制器50的操作支援部50b为,当按下规定的按钮时,开始铺装支援处理,并导出目标轨道tr4。
110.目标轨道tr4为前侧整平机30的后端中央部追随的轨道。目标轨道tr4设定为,前侧整平机30的后端中央部继续位于中心线l1上,直至左后侧整平机31l的后端到达箭头ar10所示的地点。并且,目标轨道tr4设定为,当左后侧整平机31l的后端位于箭头ar11所示的地点时,前侧整平机30的后端中央部位于中心线l2上。并且,目标轨道tr4设定为,前侧整平机30的后端中央部继续位于中心线l2上,直至左后侧整平机31l的后端到达箭头ar12所示的地点。而且,目标轨道tr4设定为,当左后侧整平机31l的后端位于箭头ar13所示的地点时,前侧整平机30的后端中央部位于中心线l1上。
111.控制器50以使前侧整平机30的后端中央部沿目标轨道tr4移动的方式使沥青滚平机100移动。
112.并且,当左后侧整平机31l的后端位于箭头ar10所示的地点时,控制器50开始左后侧整平机31l的伸长及右后侧整平机31r的伸长,当左后侧整平机31l的后端到达箭头ar11所示的地点或其附近时,结束左后侧整平机31l的伸长及右后侧整平机31r的伸长。并且,当左后侧整平机31l的后端位于箭头ar12所示的地点时,控制器50开始左后侧整平机31l的收缩及右后侧整平机31r的收缩,当左后侧整平机31l的后端到达箭头ar13所示的地点或其附
近时,结束左后侧整平机31l的收缩及右后侧整平机31r的收缩。
113.通过如上所述的铺装支援处理,控制器50在配置支援处理中,即使在以牵引机1的中心线l0不是与中心线l2一致而是与中心线l1一致的方式使沥青滚平机100移动的情况下,也能够支援操作者对沥青滚平机100的操作,以便能够适当地铺装加宽部wd。这是因为,控制器50在沥青滚平机100的行走中,在沥青滚平机100到达加宽部wd之前,能够使牵引机1的中心线l0与包括加宽部wd的铺装预定区域的中心线l2一致。
114.在图8a的例子中,控制器50以较缓慢地进行沥青滚平机100的车宽度方向上的移动的方式设定目标轨道tr3,因此能够抑制由急剧的操舵引起的不良影响。
115.在图8b的例子中,控制器50以较快速地进行沥青滚平机100的车宽度方向上的移动的方式设定目标轨道tr4,因此能够缩小由沥青滚平机100的车宽度方向上的移动引起的不良影响所波及的范围。
116.如上所述,本发明的实施方式所涉及的沥青滚平机100具备牵引机1、设置于牵引机1的前侧并容纳铺路材料的料斗2、将料斗2内的铺路材料供给至牵引机1后侧的输送机cv、在牵引机1的后侧铺展由输送机cv供给的铺路材料的螺杆sc、在螺杆sc的后侧压实通过螺杆sc铺展的铺路材料的整平机3、获取与被铺设的道路相关的信息的信息获取装置51及作为控制装置的控制器50。而且,控制器50构成为根据信息获取装置51所获取的信息,支援将牵引机1的中心与铺装预定区域的中心对齐的操作。
117.该结构能够提高铺装施工的工作效率。这是因为,沥青滚平机100的操作者在开始铺装施工之前,能够将沥青滚平机100配置于适合于铺装预定区域的宽度的位置。该结构例如能够防止由于沥青滚平机100的不适当配置而产生如图6b所示那样的未被铺装的部分。因此,该结构能够减少用于加工这种未被铺装的部分的手动工作的时间和劳力,进而能够提高作为整个铺装施工的工作效率。
118.并且,该结构基本上能够使左右后侧整平机31的伸缩长度均等,并且能够使之后由沥青滚平机100进行的铺装工作稳定。这是因为,能够防止由左右后侧整平机31的不均等的伸缩长度引起的沥青滚平机100的直进性的恶化等。
119.控制器50例如构成为根据信息获取装置51所获取的信息,自主地控制牵引机1的动作,并且将牵引机1的中心与铺装预定区域的中心对齐。在该结构中,沥青滚平机100自主地配置于适合于铺装预定区域的位置。因此,该结构能够减轻与沥青滚平机100的配置工作相关的操作者的负担。该结构例如能够防止由未适当地进行操作者对操舵装置54及行走转盘55等的手动操作而引起的配置工作的重做,进而能够提高作为整个铺装施工的工作效率。
120.控制器50例如可以构成为能够使用声音、光及振动中的至少一个而向外部通知牵引机1的中心与铺装预定区域的中心之间的距离的大小。该结构能够支援进行配置工作时的操作者对操舵装置54及行走转盘55等的手动操作。
121.铺装预定区域的中心例如可以根据铺装预定区域的最大宽度来确定。例如,如图6a~图6c所示,当铺装预定区域包括加宽部wd时,铺装预定区域的中心可以根据包括加宽部wd的部分的宽度w2来确定,而不是根据不包括加宽部wd的部分的宽度w1来确定。具体而言,控制器50可以将包括加宽部wd的部分的中心线l2用作铺装预定区域的中心线,而不是将不包括加宽部wd的部分的中心线l1用作铺装预定区域的中心线。根据该结构,控制器50
能够防止在铺装加宽部wd时后侧整平机31的伸长量不足。
122.信息获取装置51例如为摄像机或lidar。此时,控制器50可以构成为根据作为信息获取装置51的摄像机或lidar的输出确定铺装预定区域的中心。
123.控制器50也可以构成为根据预先存储的与铺装预定区域相关的信息及安装于牵引机1的定位装置60的输出,支援将牵引机1的中心与铺装预定区域的中心对齐的操作。根据该结构,控制器50即便不利用作为信息获取装置51的摄像机或lidar的输出也能够实现如上所述那样的效果。
124.典型地,整平机3包括在车长方向上错开配置的前侧整平机30及后侧整平机31。而且,后侧整平机31包括构成为相对于前侧整平机30能够向左方伸缩的左后侧整平机31l及构成为相对于前侧整平机30能够向右方伸缩的右后侧整平机31r。此时,例如,如图8b所示,在大部分铺装工作中,可以以使左后侧整平机31l的伸长量与右后侧整平机31r的伸长量相等的方式确定铺装预定区域的中心。此时,后侧整平机31可以构成为在行走中伸缩。
125.以上,对本发明的优选实施方式已进行说明。然而,本发明并不限定于上述实施方式。上述实施例在不脱离本发明的范围内,能够适用各种变形或置换等。并且,参考上述实施方式进行说明的各特征只要在技术上不矛盾,则能够适当进行组合。
126.例如,在上述实施方式中,沥青滚平机100构成为能够支援铺装笔直延伸的铺装预定区域时由操作者进行的操作,但也可以构成为能够支援铺装包括弯曲部的铺装预定区域时由操作者进行的操作。
127.并且,在上述实施方式中,沥青滚平机100构成为能够支援同时铺装被铺装的道路整个宽度时由操作者进行的操作,但也可以构成为能够支援仅铺装被铺装的道路的单侧车线时由操作者进行的操作。
128.本技术主张基于2019年3月25日于日本技术的日本专利申请2019
‑
057339号的优先权,该日本专利申请的全部内容通过参考援用于本说明书中。
129.符号的说明
[0130]1‑
牵引机,1g
‑
导轨,1s
‑
驾驶座,2
‑
料斗,3
‑
整平机,3a
‑
调平臂,5
‑
后轮,6
‑
前轮,28
‑
伸缩缸,28l
‑
左伸缩缸,28r
‑
右伸缩缸,30
‑
前侧整平机,30l
‑
左前侧整平机,30r
‑
右前侧整平机,31
‑
后侧整平机,31l
‑
左后侧整平机,31r
‑
右后侧整平机,43
‑
造型板,50
‑
控制器,50a
‑
运算部,50b
‑
操作支援部,51
‑
信息获取装置,51b
‑
后方监视装置,51f
‑
前方监视装置,52
‑
显示装置,53
‑
通信装置,54
‑
操舵装置,55
‑
行走转盘,56
‑
行走速度传感器,57
‑
声音输出装置,58
‑
操舵用马达,59
‑
行走用马达,59f
‑
前侧行走用液压马达,59b
‑
后侧行走用液压马达,60
‑
定位装置,100
‑
沥青滚平机,ap
‑
地上物,bs
‑
路基,cv
‑
输送机,ds
‑
工作支援系统,np
‑
新设铺装体,pv
‑
铺路材料,sc
‑
螺杆。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。