技术特征:
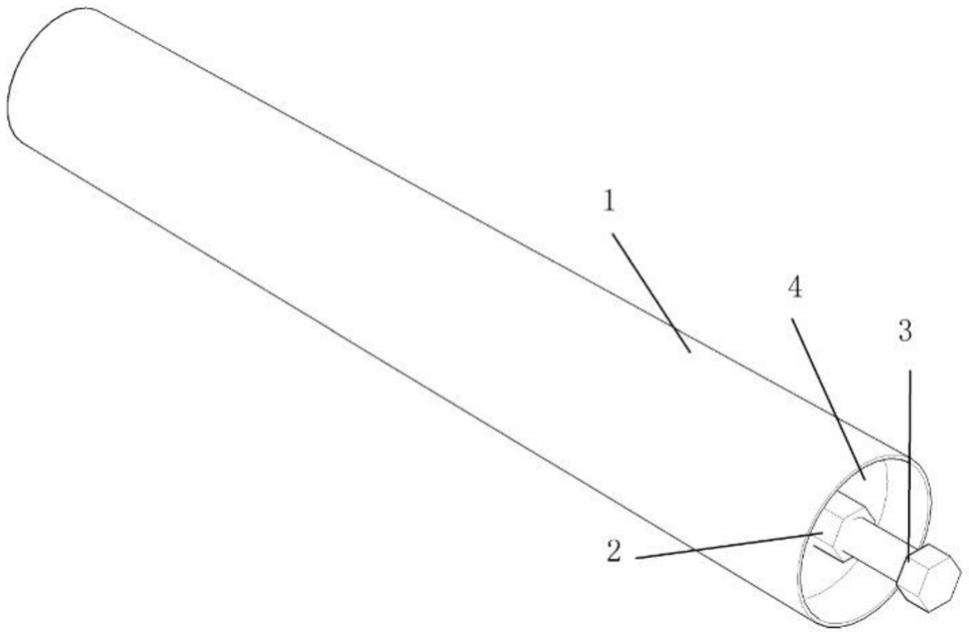
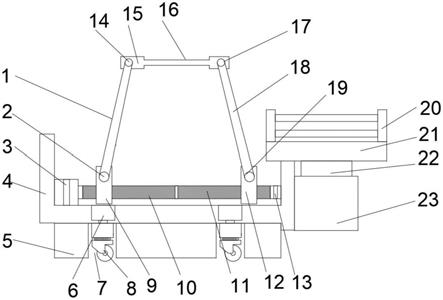
1.一种海参捕捞机器人,包括机架(1),所述机架(1)上设有控制系统、吸取动力机构(2)、海参存放容器(3)和海参吸取管(4),其特征在于:所述海参吸取管(4)与机架(1)之间设有吸取管俯仰机构(5),所述吸取管俯仰机构(5)与机架(1)相连接,所述吸取管俯仰机构(5)驱动海参吸取管(4)进行俯仰作业。2.根据权利要求1所述的一种海参捕捞机器人,其特征在于:所述吸取管俯仰机构(5)包括俯仰电机固定座(6)、俯仰电机(7)、同步带(8)、俯仰驱动轮(9)、俯仰从动轮(10)和连杆(14),所述海参吸取管(4)包括钢丝软管(11)、吸管夹套(12)和吸管弯头(13),所述钢丝软管(11)一端与海参存放容器(3)固定连接,另一端与吸管弯头(13)固定连接,所述钢丝软管(11)上固定设有俯仰电机固定座(6),所述钢丝软管(11)两侧分别设有连杆(14),所述吸管弯头(13)上设有吸管夹套(12),所述吸管夹套(12)套在吸管弯头(13)上并与吸管弯头(13)固定连接,所述俯仰电机固定座(6)与机架(1)连接,所述俯仰电机固定座(6)上固定设有俯仰电机(7),所述俯仰电机(7)与控制系统相连接,所述俯仰电机(7)的输出轴上固定设有俯仰驱动轮(9),所述俯仰驱动轮(9)经同步带(8)与俯仰从动轮(10)连接,所述俯仰从动轮(10)的固定轴经轴承与俯仰电机固定座(6)固定连接,所述钢丝软管(11)一侧的连杆(14)一端与俯仰从动轮(10)的固定轴固定连接,另一端与吸管夹套(12)固定连接,所述钢丝软管(11)另一侧的连杆(14)一端经轴、轴承与俯仰电机固定座(6)连接,另一端与吸管夹套(12)固定连接。3.根据权利要求2所述的一种海参捕捞机器人,其特征在于:所述海参吸取管(4)与机架(1)之间设有吸取管横转机构(15),所述吸取管横转机构(15)包括横转电机(16)、横转固定座(17)、横转驱动轮(18)、横转从动轮(19)、同步带和横转从动轮轴(20),所述俯仰电机固定座(6)一侧设有横转固定座(17),所述俯仰电机固定座(6)上端设有支撑轴(21),下端设有横转从动轮轴(20),所述俯仰电机固定座(6)上端经支撑轴(21)、轴承与机架(1)连接,所述横转固定座(17)与机架(1)固定连接,横转固定座(17)上固定设有横转电机(16),所述横转电机(16)与控制系统相连接,所述横转电机(16)的输出轴上固定设有横转驱动轮(18),所述横转驱动轮(18)经同步带与横转从动轮(19)连接,所述横转从动轮(19)固定在横转从动轮轴(20)上,所述横转从动轮轴(20)一端与俯仰电机固定座(6)固定连接,另一端经轴承与机架(1)固定连接。4.根据权利要求1或2或3所述的一种海参捕捞机器人,其特征在于:所述海参存放容器(3)内设有海参取放机构(22),所述海参取放机构(22)包括滚轮(23)、滑道、锁紧件(24)和海参抽取箱(25),所述海参存放容器(3)内设有海参抽取箱(25),所述海参抽取箱(25)上设有与钢丝软管相连通的通孔,所述海参抽取箱(25)两侧分别安装有滚轮(23),所述海参存放容器(3)内壁两侧固定设有与滚轮(23)相配合的滑道,所述海参抽取箱(25)经滚轮(23)、滑道与海参存放容器(3)滑动连接,所述海参抽取箱(25)和海参存放容器(3)之间设有锁紧件(24),所述海参抽取箱(25)经锁紧件(24)与海参存放容器(3)固定连接。5.根据权利要求1或2或3所述的一种海参捕捞机器人,其特征在于:所述吸取动力机构(2)由转接管(201)、螺旋管(202)、连接管(203)和负压动力源组成,所述海参吸取管(4)与海参存放容器(3)之间设有转接管(201),所述转接管(201)一端与海参吸取管(4)固定连接,另一端与海参存放容器(3)固定连接,所述转接管(201)内设有螺旋管(202),所述转接管(201)外设有连接管(203),所述转接管(201)朝向海参吸取管(4)的一端与螺旋管(202)
密封固定连接,所述螺旋管(202)一端与海参吸取管(4)相连通,另一端朝向海参存放容器(3)并与海参存放容器(3)相连通,所述海参存放容器(3)上间隔设有透水孔(205),所述螺旋管(202)外壁固定设有螺纹,所述螺旋管(202)外壁与转接管(201)内壁之间设有朝向海参存放容器(3)的水流通道,所述连接管(203)一端与转接管(201)固定连接并与水流通道相连通,另一端与负压动力源连接,所述负压动力源固定在机架(1),所述负压动力源由控制系统控制。6.根据权利要求5所述的一种海参捕捞机器人,其特征在于:所述负压动力源为水泵(204),所述水泵(204)的出水口与连接管(203)连接,水泵(204)的进水口与水源连接,所述水泵(204)与机架(1)固定连接,所述水泵(204)与控制系统相连接。7.根据权利要求5所述的一种海参捕捞机器人,其特征在于:所述负压动力源为螺旋桨驱动组件(206),所述螺旋桨驱动组件(206)包括螺旋桨(207)和集水罩(208),所述集水罩(208)一端与连接管(203)连接,另一端为自由进水端,所述集水罩(208)内设有螺旋桨(207),所述螺旋桨(207)与集水罩(208)固定连接,所述螺旋桨(207)由控制系统驱动。8.根据权利要求1或2或3所述的一种海参捕捞机器人,其特征在于:所述吸取动力机构(2)由吸水电机(29)、桨叶(30)和分隔罩(46)组成,所述海参存放容器(3)内固定设有分隔罩(46),所述分隔罩(46)内设有吸水电机(29)和桨叶(30),所述吸水电机(29)与分隔罩(46)固定连接,所述吸水电机(29)的输出轴上间隔固定有桨叶(30),所述吸水电机(29)与控制系统相连接。9.根据权利要求1或2或3所述的一种海参捕捞机器人,其特征在于:所述机架(1)上设有电池密封更换机构(31),所述电池密封更换机构(31)包括电池仓(32)、电池箱(33)、电池箱盖(34)和电池(35),所述机架(1)上设有电池仓(32),所述电池仓(32)一端开口,所述电池仓(32)与机架(1)固定连接,所述电池仓(32)内设有电池箱(33),所述电池(35)置于电池箱(33)内经电池箱盖(34)密封固定连接,所述电池箱(33)置于电池仓(32)内与电池仓(32)连接。10.根据权利要求2或3所述的一种海参捕捞机器人,其特征在于:所述俯仰电机固定座(6)两侧分别固定设有后连接座(41),所述吸管夹套(12)两侧分别固定设有前连接座(42),所述俯仰从动轮(10)的固定轴经轴承与后连接座(41)固定连接,所述钢丝软管(11)一侧的连杆(14)一端与俯仰从动轮(10)的固定轴固定连接,另一端与前连接座(42)固定连接,所述钢丝软管(11)另一侧的连杆(14)一端经轴、轴承与后连接座(41)固定连接,另一端与前连接座(42)固定连接。
技术总结
本实用新型涉及水下捕捞技术设备领域,具体是指一种海参捕捞机器人,包括机架,机架上设有控制系统、吸取动力机构、海参存放容器和海参吸取管,海参吸取管与机架之间设有吸取管俯仰机构,吸取管俯仰机构包括俯仰电机固定座、俯仰电机、同步带、俯仰驱动轮、俯仰从动轮和连杆,海参吸取管包括钢丝软管、吸管夹套和吸管弯头,钢丝软管一端与海参存放容器固定连接,另一端与吸管弯头固定连接,钢丝软管两侧分别设有连杆,海参吸取管与机架之间设有吸取管横转机构,吸取管横转机构包括横转电机、横转固定座、横转驱动轮、横转从动轮、同步带和横转从动轮轴,本实用新型吸取管可俯仰可横转、吸取海参效率高、能量消耗少、海参取出方便、电池更换方便。池更换方便。池更换方便。
技术研发人员:陶泽文 刘研峰 王亚丽 孙华磊 陶一锐 刘秀颖
受保护的技术使用者:未来海工智能装备(山东)有限公司
技术研发日:2021.03.04
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。