1.本实用新型涉及水下捕捞技术设备领域,具体是指一种海参捕捞机器人。
背景技术:
2.目前,海参捕捞普遍采用人工捕捞的方式,机器捕捞的应用比较少,人工捕捞工作繁琐,工作强度大,需要潜水员穿着潜水衣背着氧气罩潜到海底,找寻海参并逐个拾取装入网袋,这种捕捞方式不但效率低,而且较低的海水温度、较大的水下压强和恶劣的水底环境等因素都会对人的身体造成一定的危害,中国专利cn210538307u公开了一种吸取式海参捕捞机器人,包括箱盖,盛装容器和支撑底座,浮力装置布置在盛装容器的左右两侧,浮力装置内部设置海参识别定位系统、蓄电池和驱动控制系统,在盛装容器的左右两侧和底部分别布置竖直推进装置和水平推进装置,吸取软管安装在箱盖上,吸入端与刚性机械手相连,刚性机械手的一端与安装在盛装容器底部的舵机输出端连接,吸取动力装置安装在盛装容器内部,固定在箱盖上,盛装容器前端和刚性机械手上设有摄像头和照明装置,所述箱盖上设有排水口,把手方便箱盖的开合,吸入口用于吸取软管的安装,固定环用于固定吸取软管,所述刚性机械手,包括旋转支柱、机械臂和卡环,旋转支柱控制机械臂的运动,卡环与吸取软管连接,带动吸取软管运动,所述水平推进装置和竖直推进装置具有相同的结构,水平推进装置包括推进驱动电机、机架、安全罩和推进螺旋桨;推进驱动电机驱动推进螺旋桨旋转提供推动力,机架用来固定安装推进驱动电机,安全罩保护推进螺旋桨,所述吸取动力装置,包括吸取驱动电机、分隔罩和排水螺旋桨;吸取驱动电机安装在分隔罩下端,分隔罩上部通过螺栓与箱盖连接,上述专利的不足:一是当海参存在水下不同高度的地方时,上述专利中机器人需要频繁的上下移动来带动吸取软管上下移动来拾取海参,费时费力,能量消耗多,海参拾取作业效率低;二是上述专利中箱盖通过把手开合,而吸取软管也装在箱盖上,这就使得箱盖打开不方便,海参取出需要一个一个从箱盖中取出,很麻烦,如果整体倾倒,还要搬动机器人,十分费力。
技术实现要素:
3.本实用新型的目的是为了解决现有技术不足,提供一种吸取管可俯仰可横转、吸取海参效率高、能量消耗少、海参取出方便、速度快、电池更换方便的海参捕捞机器人。
4.为实现上述目的,本实用新型所采用的技术方案是:
5.一种海参捕捞机器人,包括机架,所述机架上设有控制系统、吸取动力机构、海参存放容器和海参吸取管,其特征在于:所述海参吸取管与机架之间设有吸取管俯仰机构,所述吸取管俯仰机构与机架相连接,所述吸取管俯仰机构驱动海参吸取管进行俯仰作业。
6.本实用新型所述吸取管俯仰机构包括俯仰电机固定座、俯仰电机、同步带、俯仰驱动轮、俯仰从动轮和连杆,所述海参吸取管包括钢丝软管、吸管夹套和吸管弯头,所述钢丝软管一端与海参存放容器固定连接,另一端与吸管弯头固定连接,所述钢丝软管上固定设有俯仰电机固定座,所述钢丝软管两侧分别设有连杆,所述吸管弯头上设有吸管夹套,所述
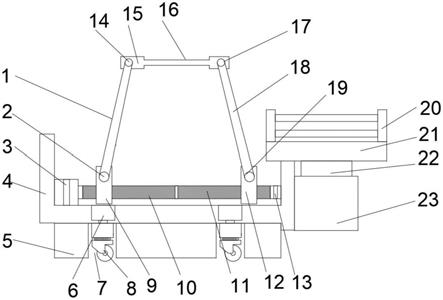
吸管夹套套在吸管弯头上并与吸管弯头固定连接,所述俯仰电机固定座与机架连接,所述俯仰电机固定座上固定设有俯仰电机,所述俯仰电机与控制系统相连接,所述俯仰电机的输出轴上固定设有俯仰驱动轮,所述俯仰驱动轮经同步带与俯仰从动轮连接,所述俯仰从动轮的固定轴经轴承与俯仰电机固定座固定连接,所述钢丝软管一侧的连杆一端与俯仰从动轮的固定轴固定连接,另一端与吸管夹套固定连接,所述钢丝软管另一侧的连杆一端经轴、轴承与俯仰电机固定座连接,另一端与吸管夹套固定连接,以利于通过俯仰电机驱动俯仰驱动轮通过同步带带动俯仰从动轮转动,俯仰从动轮通过连杆带动钢丝软管俯仰运动实现吸管弯头的俯仰,实现对于水下不同高度海参的拾取,无需移动机架,拾取海参效率高、能量消耗少。
7.本实用新型所述海参吸取管与机架之间设有吸取管横转机构,所述吸取管横转机构包括横转电机、横转固定座、横转驱动轮、横转从动轮、同步带和横转从动轮轴,所述俯仰电机固定座一侧设有横转固定座,所述俯仰电机固定座上端设有支撑轴,下端设有横转从动轮轴,所述支撑轴上端经轴承与机架固定连接,下端与俯仰电机固定座固定连接,所述横转固定座与机架固定连接,横转固定座上固定设有横转电机,所述横转电机与控制系统相连接,所述横转电机的输出轴上固定设有横转驱动轮,所述横转驱动轮经同步带与横转从动轮连接,所述横转从动轮固定在横转从动轮轴上,所述横转从动轮轴一端与俯仰电机固定座固定连接,另一端经轴承与机架固定连接,以利于通过横转电机驱动横转驱动轮通过同步带带动横转从动轮旋转,进而带动俯仰电机固定座左右横转,实现海参吸取管的左右横转。
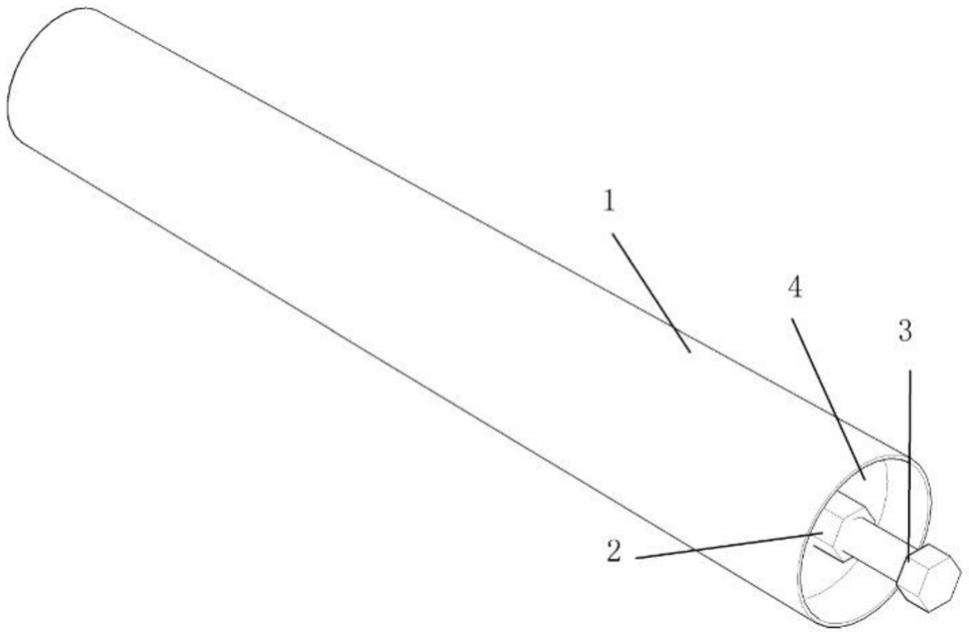
8.本实用新型所述海参存放容器内设有海参取放机构,所述海参取放机构包括滚轮、滑道、锁紧件和海参抽取箱,所述海参存放容器内设有海参抽取箱,所述海参抽取箱一端设有与钢丝软管相连通的通孔,另一端固定设有抽取板,所述海参抽取箱两侧分别安装有滚轮,所述海参存放容器内壁两侧固定设有与滚轮相配合的滑道,所述海参抽取箱经滚轮、滑道与海参存放容器滑动连接,所述海参抽取箱和海参存放容器之间设有锁紧件,所述锁紧件包括锁紧杆、锁紧把手、销轴和锁扣挂钩,所述抽取板的宽度大于海参抽取箱的宽度,所述抽取板两端分别设有锁紧把手,所述海参存放容器内壁两侧分别固定设有锁扣挂钩,所述锁紧杆一端与锁紧把手铰接,另一端穿过抽取板与锁扣挂钩相配合挂接,所述海参抽取箱置于海参存放容器内,抽取板与海参存放容器端面相抵靠,海参抽取箱经锁紧杆、锁扣挂钩和锁紧把手与海参存放容器固定连接,以利于通过旋转锁紧把手,锁紧杆与锁扣挂钩挂接固定,将海参抽取箱限位在海参存放容器内。
9.本实用新型所述吸取动力机构可以由转接管、螺旋管、连接管和负压动力源组成,所述钢丝软管与海参存放容器之间设有转接管,所述转接管一端与钢丝软管的固定连接,另一端与海参存放容器固定连接,所述转接管内设有螺旋管,所述转接管外设有连接管,所述转接管朝向钢丝软管的一端与螺旋管密封固定连接,所述螺旋管一端与钢丝软管相连通,另一端朝向海参存放容器并与海参抽取箱相连通,所述海参存放容器和海参抽取箱上分别间隔设有透水孔,所述螺旋管外壁固定设有螺纹,所述螺旋管外壁与转接管内壁之间设有朝向海参抽取箱的水流通道,所述连接管一端与转接管固定连接并与水流通道相连通,另一端与负压动力源连接,所述负压动力源固定在机架,所述负压动力源由控制系统控制,以利于通过负压动力源在海参存放容器内产生负压,使得海参吸取管前端产生吸力,实
现海参的吸取。
10.本实用新型所述负压动力源可以为水泵,所述水泵的出水口与连接管连接,水泵的进水口经水管与水源连接,所述水泵与机架固定连接,所述水泵与控制系统相连接,以利于水泵经连接管向水流通道内泵送高速水流,水流通过螺旋管外部的螺纹输送进入海参存放容器内,在螺纹管朝向海参抽取箱的端口处产生负压,在外界水压作用下,海参吸取管前端产生吸力,完成海参吸取作业。
11.本实用新型所述负压动力源也可以为螺旋桨驱动组件,所述螺旋桨驱动组件包括螺旋桨和集水罩,所述集水罩一端与连接管连接,另一端为自由进水端,所述集水罩内设有螺旋桨,所述螺旋桨与集水罩固定连接,所述螺旋桨由控制系统驱动,以利于通过螺旋桨驱动水流进入海参存放容器内,经透水孔渗出,使得海参存放容器内产生负压,促使海参吸取管完成海参吸取作业。
12.本实用新型所述吸取动力机构也可以由吸水电机、桨叶和分隔罩组成,所述海参抽取箱内设有分隔罩,所述分隔罩与抽取板固定连接,所述分隔罩内设有吸水电机和桨叶,所述吸水电机与分隔罩固定连接,所述吸水电机的输出轴上间隔固定有桨叶,所述吸水电机与控制系统相连接,以利于通过吸水电机带动桨叶旋转,使得海参抽取箱内的水向外排出,海参抽取箱内产生负压,海参吸取管产生吸力,完成海参吸取作业。
13.本实用新型所述机架上设有电池密封更换机构,所述电池密封更换机构包括电池仓、电池箱、电池箱盖、电池和螺钉,所述机架上设有电池仓,所述电池仓一端开口,所述电池仓与机架固定连接,所述电池仓内设有电池箱,所述电池置于电池箱内经电池箱盖密封固定连接,所述电池箱置于电池仓内,电池箱两侧经螺钉与电池仓固定连接,以利于需要更换电池时,将螺钉取下,即可将电池箱取出,进行电池更换,同时电池存放在电池箱内,密封保存,防止海水入侵。
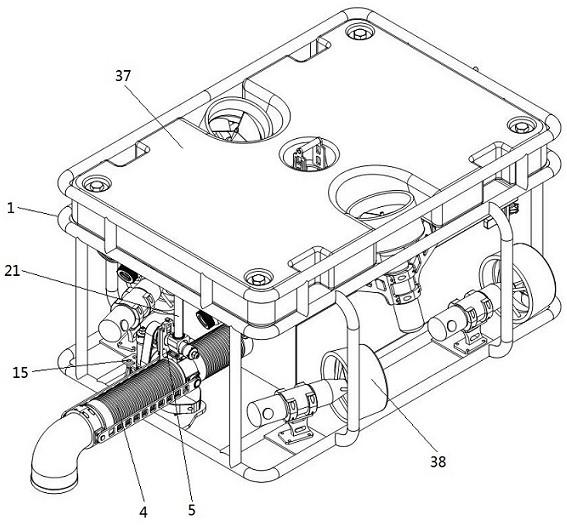
14.本实用新型所述机架上固定设有浮板,以利于通过浮板提高机架在水下所受的浮力。
15.本实用新型所述机架上固定设有推进器、摄像装置和照明装置,所述推进器、摄像装置和照明装置分别与控制系统相连接,以利于通过推进器驱动机器人移动,通过摄像装置和照明装置观察和寻找海参。
16.本实用新型所述俯仰电机固定座两侧分别固定设有后连接座,所述吸管夹套两侧分别固定设有前连接座,所述俯仰从动轮的固定轴经轴承与后连接座固定连接,所述钢丝软管一侧的连杆一端与俯仰从动轮的固定轴固定连接,另一端与前连接座固定连接,所述钢丝软管另一侧的连杆一端经轴、轴承与后连接座固定连接,另一端与前连接座固定连接,以利于通过前连接座和后连接座提高海参吸取管的结构强度。
17.本实用新型所述抽取板上至少固定设有一个抽取把手,以利于通过抽取把手方便海参抽取箱的取放。
18.本实用新型所述电池箱上固定设有电池抽拉把手,以利于通过电池抽拉把手方便更换电池箱。
19.本实用新型由于采用上述结构,具有吸取管可俯仰可横转、吸取海参效率高、能量消耗少、海参取出方便、速度快、电池更换方便等优点。
附图说明
20.图1是本实用新型一个角度的结构示意图。
21.图2是本实用新型另一个角度的结构示意图。
22.图3是本实用新型图1的主视图。
23.图4是本实用新型中海参吸取管、吸取管俯仰机构和吸取管横转机构的放大结构示意图。
24.图5是本实用新型图4的后视图。
25.图6是本实用新型中吸取动力机构一种结构示意图。
26.图7是本实用新型中图6的剖视图。
27.图8是本实用新型中电池密封更换机构的结构示意图。
28.图9是本实用新型中图8的剖视图。
29.图10是本实用新型另一种吸取动力机构中负压动力源为水泵的结构示意图。
30.图11是本实用新型图10中吸取动力机构的部分剖视图。
31.图12是本实用新型另一种吸取动力机构中负压动力源为螺旋桨驱动组件的结构示意图。
32.图13是本实用新型图12中吸取动力机构的部分剖视图。
33.附图标记:机架1,吸取动力机构2,转接管201,螺旋管202,连接管203,水泵204,透水孔205,螺旋桨驱动组件206,螺旋桨207,集水罩208,海参存放容器3,海参吸取管4,吸取管俯仰机构5,俯仰电机固定座6,俯仰电机7,同步带8,俯仰驱动轮9,俯仰从动轮10,钢丝软管11,吸管夹套12,吸管弯头13,连杆14,吸取管横转机构15,横转电机16,横转固定座17,横转驱动轮18,横转从动轮19,横转从动轮轴20,支撑轴21,海参取放机构22,滚轮23,锁紧件24,海参抽取箱25,抽取板26,锁紧杆27,锁紧把手28,吸水电机29,桨叶30,电池密封更换机构31,电池仓32,电池箱33,电池箱盖34,电池35,螺钉36,浮板37,推进器38,摄像装置39,照明装置40,后连接座41,前连接座42,抽取把手44,电池抽拉把手45,分隔罩46。
具体实施方式
34.下面结合附图,对本实用新型的具体实施方式作进一步详细描述。
35.一种海参捕捞机器人,包括机架1,所述机架1上设有控制系统、吸取动力机构2、海参存放容器3和海参吸取管4,其特征在于:所述海参吸取管4与机架1之间设有吸取管俯仰机构5,所述吸取管俯仰机构5与机架1相连接,所述吸取管俯仰机构5驱动海参吸取管4进行俯仰作业。
36.本实用新型所述吸取管俯仰机构5包括俯仰电机固定座6、俯仰电机7、同步带8、俯仰驱动轮9、俯仰从动轮10和连杆14,所述海参吸取管4包括钢丝软管11、吸管夹套12和吸管弯头13,所述钢丝软管11一端与海参存放容器3固定连接,另一端与吸管弯头13固定连接,所述钢丝软管11上固定设有俯仰电机固定座6,所述钢丝软管11两侧分别设有连杆14,所述吸管弯头13上设有吸管夹套12,所述吸管夹套12套在吸管弯头13上并与吸管弯头13固定连接,所述俯仰电机固定座6与机架1连接,所述俯仰电机固定座6上固定设有俯仰电机7,所述俯仰电机7与控制系统相连接,所述俯仰电机7的输出轴上固定设有俯仰驱动轮9,所述俯仰驱动轮9经同步带8与俯仰从动轮10连接,所述俯仰从动轮10的固定轴经轴承与俯仰电机固
定座6固定连接,所述钢丝软管11一侧的连杆14一端与俯仰从动轮10的固定轴固定连接,另一端与吸管夹套12固定连接,所述钢丝软管11另一侧的连杆14一端经轴、轴承与俯仰电机固定座6固定连接,另一端与吸管夹套12固定连接,以利于通过俯仰电机驱动俯仰驱动轮通过同步带带动俯仰从动轮转动,俯仰从动轮通过连杆带动钢丝软管俯仰运动实现吸管弯头的俯仰,实现对于水下不同高度海参的拾取,无需移动机架,拾取海参效率高、能量消耗少。
37.本实用新型所述海参吸取管4与机架1之间设有吸取管横转机构15,所述吸取管横转机构15包括横转电机16、横转固定座17、横转驱动轮18、横转从动轮19、同步带和横转从动轮轴20,所述俯仰电机固定座6一侧设有横转固定座17,所述俯仰电机固定座6上端设有支撑轴21,下端设有横转从动轮轴20,所述支撑轴21上端经轴承与机架1固定连接,下端与俯仰电机固定座6固定连接,所述横转固定座17与机架1固定连接,横转固定座17上固定设有横转电机16,所述横转电机16与控制系统相连接,所述横转电机16的输出轴上固定设有横转驱动轮18,所述横转驱动轮18经同步带与横转从动轮19连接,所述横转从动轮19固定在横转从动轮轴20上,所述横转从动轮轴20一端与俯仰电机固定座6固定连接,另一端经轴承与机架1固定连接,以利于通过横转电机驱动横转驱动轮通过同步带带动横转从动轮旋转,进而带动俯仰电机固定座左右横转,实现海参吸取管的左右横转。
38.本实用新型所述海参存放容器3内设有海参取放机构22,所述海参取放机构22包括滚轮23、滑道、锁紧件24和海参抽取箱25,所述海参存放容器3与机架1固定连接,所述海参存放容器3内设有海参抽取箱25,所述海参抽取箱25一端设有与钢丝软管相连通的通孔,另一端固定设有抽取板26,所述海参抽取箱25两侧分别安装有滚轮23,所述海参存放容器3内壁两侧固定设有与滚轮23相配合的滑道,所述海参抽取箱25经滚轮23、滑道与海参存放容器3滑动连接,所述海参抽取箱25和海参存放容器3之间设有锁紧件24,所述锁紧件24包括锁紧杆27、锁紧把手28、销轴和锁扣挂钩,所述抽取板26的宽度大于海参抽取箱25的宽度,所述抽取板26两端分别设有锁紧把手28,所述海参存放容器3内壁两侧分别固定设有锁扣挂钩,所述锁紧杆27一端与锁紧把手28铰接,另一端穿过抽取板26与锁扣挂钩相配合挂接,所述海参抽取箱25置于海参存放容器3内,抽取板26与海参存放容器3端面相抵靠,海参抽取箱25经锁紧杆27、锁扣挂钩和锁紧把手28与海参存放容器3固定连接,以利于通过旋转锁紧把手,锁紧杆与锁扣挂钩挂接固定,将海参抽取箱限位在海参存放容器内。
39.本实用新型所述吸取动力机构2可以由转接管201、螺旋管202、连接管203和负压动力源组成,所述钢丝软管11与海参存放容器3之间设有转接管201,所述转接管201一端与钢丝软管11的固定连接,另一端与海参存放容器3固定连接,所述转接管201内设有螺旋管202,所述转接管201外设有连接管203,所述转接管201朝向钢丝软管11的一端与螺旋管202密封固定连接,所述螺旋管202一端与钢丝软管11相连通,另一端朝向海参存放容器3并与海参抽取箱25相连通,所述海参存放容器3和海参抽取箱25上分别间隔设有透水孔205,所述螺旋管202外壁固定设有螺纹,所述螺旋管202外壁与转接管201内壁之间设有朝向海参抽取箱25的水流通道,所述连接管203一端与转接管201固定连接并与水流通道相连通,另一端与负压动力源连接,所述负压动力源固定在机架1,所述负压动力源由控制系统控制,以利于通过负压动力源在海参存放容器内产生负压,使得海参吸取管前端产生吸力,实现海参的吸取。
40.本实用新型所述负压动力源可以为水泵204,所述水泵204的出水口与连接管203
连接,水泵204的进水口与水源连接,所述水泵204与机架1固定连接,所述水泵204与控制系统相连接,以利于水泵经连接管向水流通道内泵送高速水流,水流通过螺旋管外部的螺纹输送进入海参存放容器内,在螺纹管朝向海参抽取箱的端口处产生负压,在外界水压作用下,海参吸取管前端产生吸力,完成海参吸取作业。
41.本实用新型所述负压动力源也可以为螺旋桨驱动组件206,所述螺旋桨驱动组件206包括螺旋桨207和集水罩208,所述集水罩208一端与连接管203连接,另一端为自由进水端,所述集水罩208内设有螺旋桨207,所述螺旋桨207与集水罩208固定连接,所述螺旋桨207由控制系统驱动,以利于通过螺旋桨驱动水流进入海参存放容器内,经透水孔渗出,使得海参存放容器内产生负压,促使海参吸取管完成海参吸取作业。
42.本实用新型所述吸取动力机构2也可以由吸水电机29、桨叶30和分隔罩46组成,所述海参抽取箱25内设有分隔罩46,所述分隔罩46与抽取板26固定连接,所述分隔罩46内设有吸水电机29和桨叶30,所述吸水电机29与分隔罩46固定连接,所述吸水电机29的输出轴上间隔固定有桨叶30,所述吸水电机29与控制系统相连接,以利于通过吸水电机带动桨叶旋转,使得海参抽取箱内的水向外排出,海参抽取箱内产生负压,海参吸取管产生吸力,完成海参吸取作业。
43.本实用新型所述机架1上设有电池密封更换机构31,所述电池密封更换机构31包括电池仓32、电池箱33、电池箱盖34、电池35和螺钉36,所述机架1上设有电池仓32,所述电池仓32一端开口,所述电池仓32与机架1固定连接,所述电池仓32内设有电池箱33,所述电池35置于电池箱33内经电池箱盖34密封固定连接,所述电池箱33置于电池仓32内,电池箱33两侧经螺钉36与电池仓32固定连接,以利于需要更换电池时,将螺钉取下,即可将电池箱取出,进行电池更换,同时电池存放在电池箱内,密封保存,防止海水入侵。
44.本实用新型所述机架1上固定设有浮板37,以利于通过浮板提高机架在水下所受的浮力。
45.本实用新型所述机架1上固定设有推进器38、摄像装置39和照明装置40,所述推进器38、摄像装置39和照明装置40分别与控制系统相连接,以利于通过推进器驱动机器人移动,通过摄像装置和照明装置观察和寻找海参。
46.本实用新型所述俯仰电机固定座6两侧分别固定设有后连接座41,所述吸管夹套12两侧分别固定设有前连接座42,所述俯仰从动轮10的固定轴经轴承与后连接座41固定连接,所述钢丝软管11一侧的连杆14一端与俯仰从动轮10的固定轴固定连接,另一端与前连接座42固定连接,所述钢丝软管11另一侧的连杆14一端经轴、轴承与后连接座41固定连接,另一端与前连接座42固定连接,以利于通过前连接座和后连接座提高海参吸取管的结构强度。
47.本实用新型所述抽取板26上至少固定设有一个抽取把手44,以利于通过抽取把手方便海参抽取箱的取放。
48.本实用新型所述电池箱33上固定设有电池抽拉把手45,以利于通过电池抽拉把手方便更换电池箱。
49.如附图1
‑
附图9,使用前,机器人上的控制控制系统可通过电缆与水上控制平台连接,方便渔民在岸上操控机器人,机架上可设置吊装架,方便吊装机器人,使用时,通过吊装架、电缆将将机器人放到水下,机器人通过推进器调整其在水下的位置,机器人通过摄像装
置的高清摄像头和照明装置的照明灯来观察和查看水下海参的位置,然后启动吸取管俯仰机构和吸取管横转机构通过驱动海参吸取管上下俯仰和左右横转来抓取海参,避免了频繁移动机器人,节约了机器人移动来回的时间和能量,提高了海参捕捞的效率,本实用新型相比现有技术,对于水下不同高度地方的海参,启动俯仰电机即可实现吸取管的上下俯仰,海参吸取效率高;二是本实用新型中海参抽取箱可以从海参存放容器中取出,使用的时候,通过锁紧件将海参抽取箱固定在海参存放容器内,用来存放海参吸取管吸取的海参,通过吸取管俯仰机构和吸取管横转机构调节吸取管的位置,本实用新型中提供三种吸取动力机构,一种如附图10和附图11,水泵设置在海参存放容器外侧,通过向海参存放容器内泵送高速水流,使得海参抽取箱内产生负压,进而使得吸管弯头处产生吸力,吸取海参;第二种如附图12和13,负压动力源采用螺旋桨驱动组件,通过驱动螺旋桨旋转,将水源吸取经集水罩、连接管进入海参存放容器内,水流经透水孔渗出,使得海参存放容器内产生负压,进而使得吸管弯头处产生吸力,吸取海参;第三种是电机设置在海参抽取箱内,如附图6和附图7,吸水电机驱动桨叶转动,使得海参抽取箱内部水排出产生负压,使得吸取管前端产生吸力,实现海参的吸取,两种方式可根据需求设置,水泵设置在海参存放容器外部,节约了海参存放容器内部的空间,有利于一次吸取更多的海参,提高作业效率,海参捕捞完成后,旋转锁紧把手,使得锁紧杆与锁扣挂钩分开,通过抽取把手将海参抽取箱从海参存放容器内抽出,即可将海参取出,使用方便,海参倾倒方便,效率高;三是如附图8和附图9,电池箱可整体从电池仓中取出,螺钉装拆便捷,电池更换方便,渔民在进行捕捞作业时不用自备电源,只需携带备用电池即可。
50.本实用新型由于采用上述结构,具有吸取管可俯仰可横转、吸取海参效率高、能量消耗少、海参取出方便、速度快、电池更换方便等优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。