1.本发明涉及电路板焊接技术领域,特别涉及一种传感器焊接机。
背景技术:
2.电路板焊接(例如在主板上焊接电子元器件、芯片等)是电子产品制造过程中的重要工艺流程;电路板焊接主要采用锡焊,即通过高温的焊枪将焊锡融化后连接电子元器件和电路板。
3.对于大部分传感器来说,在焊接到电路板上时需要区分传感器引脚的正负极,正极引脚与负极引脚需要与电路板上特定的金属过孔配合,从而防止传感器正负极连接错误导致烧毁传感器以及电路板。
4.相关技术中,大部分电路板元器件的正负极引脚长度不同,正极引脚的长度要大于负极引脚的长度,主要靠人工区分元器件的正负极引脚。当工人专注度下降时,容易因失误导致正负极安装错误,导致烧毁元器件及电路板。
5.中国专利cn217618277u公开了一种印刷电路板组件用的焊接装置,这种焊接装置设有线圈、弹簧、第一支杆、第二支杆、第一套筒、第二套筒和卡板,第一套筒的作用是为线圈提供支撑,第二套筒的作用是为第二支杆提供支撑,线圈启动带动磁杆移动,磁杆移动带动弹簧移动,弹簧移动使第一支杆移动,第一支杆移动带动第二支杆移动,第二支杆移动带动卡板移动,卡板移动使物料夹紧防止焊接过程中物料偏移。但该焊接装置只是对元器件进行限位,而无法区分元器件的正负极,仍需要人工区分正负极来防止元器件焊接错误,而人工区分正负极容易出现失误从而导致元器件正负极安装错误,使得烧毁元器件及电路板。
技术实现要素:
6.本发明提供一种传感器焊接机,旨在解决相关技术中无法区分元器件正负极的问题。
7.本发明的一种传感器焊接机,包括:外壳、电路板定位组件、焊接组件和元器件定位组件;所述电路板定位组件设在所述外壳内部,且将所述外壳分为上部区域与下部区域;所述焊接组件设在所述外壳上部区域内;所述元器件定位组件设在所述电路板定位组件下方,所述元器件定位组件包括外套筒、内套筒和底座,所述外套筒设在所述下部区域内,所述内套筒滑移配合在所述外套筒内,所述内套筒分为上套筒和下套筒,所述下套筒内壁上设有螺旋滑槽,所述底座与所述螺旋滑槽滑移配合,所述底座底部设有第一驱动件,所述底座与所述内套筒之间设有连接架,所述连接架是伸缩杆,所述连接架的底部与所述底座滑移配合,所述上套筒内壁上设有限位环,所述连接架配合在所述限位环内,所述连接架的顶端转动连接有向所述内套筒轴心
方向延伸的挡板,所述第一驱动件用于驱动所述底座上下移动,所述底座在所述下套筒内沿着所述螺旋滑槽移动,从而在上下移动的同时相对所述内套筒转动。
8.采用了上述技术方案,本发明的有益效果为:电路板上具有正极金属过孔和负极金属过孔,外套筒位于正极金属过孔和负极金属过孔的正下方。元器件的底端与底座平齐,元器件的顶端具有正极引脚和负极引脚,正极引脚的长度大于负极引脚的长度,挡板的位置高于负极引脚的顶端且低于正极引脚的底端,底座滑移配合在螺旋滑槽内,当第一驱动件底座向上移动时,底座会沿着螺旋滑槽移动,底座会相对内套筒转动,底座可以带动元器件同步转动,由于连接架的底部与底座滑动配合,连接架配合在限位环内,使得底座在向上运动时连接架可以同步向上移动,元器件在转动过程中,其正极引脚会与挡板止抵,此时挡板阻碍元器件继续转动,此时元器件的正极引脚与负极引脚分别位于电路板上的正极金属过孔和负极金属过孔的正下方。当滑块移至螺旋滑槽顶端时底座停止转动,此时连接架收缩,挡板会因元器件顶端的挤压而转动,第一驱动件继续推动底座向上移动使得元器件的顶端与电路板止抵,元器件的正极引脚与负极引脚分别与电路板上的正极金属过孔和负极金属过孔配合,然后通过焊接组件进行焊接,此过程中元器件定位组件实现了对元器件的正负极引脚的区分以及元器件的定位。
9.优选的,所述上套筒的内壁两侧均设有摆动杆,所述摆动杆的内壁上设有滑动槽,所述滑动槽的底端与所述螺旋滑槽连通,所述摆动杆均通过卷簧与所述上套筒转动连接,两个所述摆动杆的顶端均设有呈半圆形的定位板,两个所述定位板止抵形成圆形结构,圆形结构上设有间隔分布的第一定位孔和第二定位孔,所述外套筒侧壁上设有与所述摆动杆对应的配合槽,所述内套筒在所述外套筒内移动至所述摆动杆与所述配合槽配合时,所述卷簧带动所述摆动杆摆动,所述定位板与所述摆动杆同步摆动。
10.采用了上述技术方案,本发明的有益效果为:第一定位孔和第二定位孔与电路板上的正极金属过孔和负极金属过孔对应,元器件在向上移动的过程中其正极引脚和负极引脚会分别与第一定位孔和第二定位孔配合,防止元器件在挡板转动后失去对元器件的限位导致元器件转动,使得其正极引脚和负极引脚无法与电路板上的正极金属过孔和负极金属过孔对齐,滑块到达螺旋滑槽的顶端后会沿着滑动槽继续向上滑动,当滑块到达滑动槽的顶端时,底座会带动内套筒同步向上移动,当摆动杆与外套筒侧壁的配合槽对齐时,元器件的正极引脚与负极引脚至少部分位于电路板对应的金属过孔中,摆动杆在卷簧的作用下向外摆动,使得两个定位板分离,防止定位板阻碍元器件的顶端与电路板止抵。
11.优选的,所述元器件定位组件下方设有滑台,所述滑台的顶端与所述外套筒的底端连接,所述滑台可以驱动所述元器件定位组件在水平面上移动。
12.优选的,所述滑台包括纵移杆和横移杆,所述纵移杆有两个,且二者平行间隔分布在所述外壳底面上,所述纵移杆上设有纵移滑槽,所述横移杆的两端分别滑移配合在所述纵移滑槽内,所述横移杆可在所述纵移滑槽内移动,所述横移杆上设有横移滑槽,所述外套筒的底端滑移配合在所述横移滑槽内,所述外套筒可在所述横移滑槽内移动。
13.优选的,所述第一驱动件是气缸,所述气缸的底端与所述外套筒连接,所述气缸的顶端滑移配合有推杆,所述推杆的顶端与所述底座止抵,所述推杆顶端设有泄压阀。
14.采用了上述技术方案,本发明的有益效果为:
通过对气缸内进行充气或排气实现改变气缸内的压力,从而实现气缸推杆的上下移动,在焊接过程中持续对气缸内进行充气,通过泄压阀排掉多余气体从而保持气缸内的压力处于稳定值,多余的气体在内套筒中形成气流并流动,从而可以对焊点处进行散热。
15.优选的,所述外壳侧壁上设有传送通道,所述外套筒上设有进料口,所述进料口与所述传送通道对应分布。
16.优选的,所述底座是环形结构,所述底座内壁上设有多个定位槽,多个定位槽沿着周向间隔分布,每个所述定位槽内均设有定位块,所述定位块通过第二弹性件与所述定位槽连接。
17.采用了上述技术方案,本发明的有益效果为:定位块与底座弹性连接,定位块与底座弹性连接,定位块的端部与元器件止抵,当所有第二弹性件受力平衡时,实现元器件与底座同轴分布,从而可以定位元器件。
18.优选的,所述底座底部还设有拨杆,所述拨杆有两个,且关于底座的中点中心对称分布,所述拨杆的一端与所述底座转动连接。
19.采用了上述技术方案,本发明的有益效果为:当待焊元器件进入外套筒内时,底座在重力的作用下向下移动,并带动内套筒同步向下移动,滑块会沿着下套筒内壁的螺旋滑槽向下移动,实现底座的转动,两个拨杆均与底座同步运动,两个拨杆会分别与元器件的正极引脚和负极引脚止抵,两个拨杆的底端与元器件顶端止抵。当底座继续向下移动时,元器件的顶端会对拨杆施加向上的压力使得拨杆绕拨杆与元器件的连接处转动,拨杆在转动过程中可以将弯折的正极引脚或负极引脚拨直,从而防止元器件的引脚因弯折而无法对齐电路板的金属过孔。
20.优选的,所述焊接组件包括机械臂和焊接枪,所述机械臂的底端与所述外壳固定连接,所述机械臂的顶端与所述焊接枪固定连接,所述机械臂用于所述焊接枪在所述上部区域内的移动。
21.优选的,所述外壳在所述上部区域的侧壁上设有活动门。
附图说明
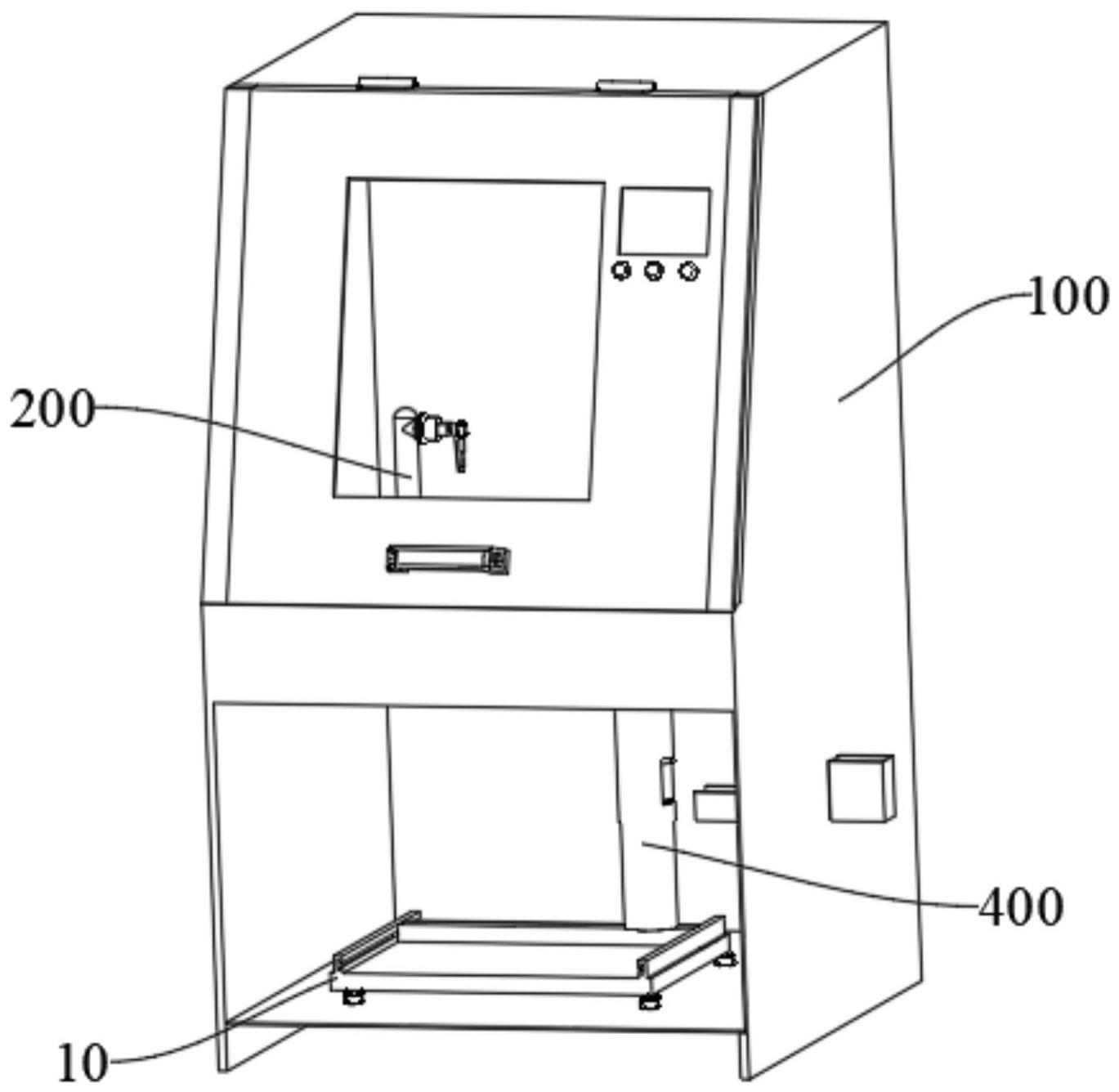
22.图1是本发明实施例1的传感器焊接机示意图。
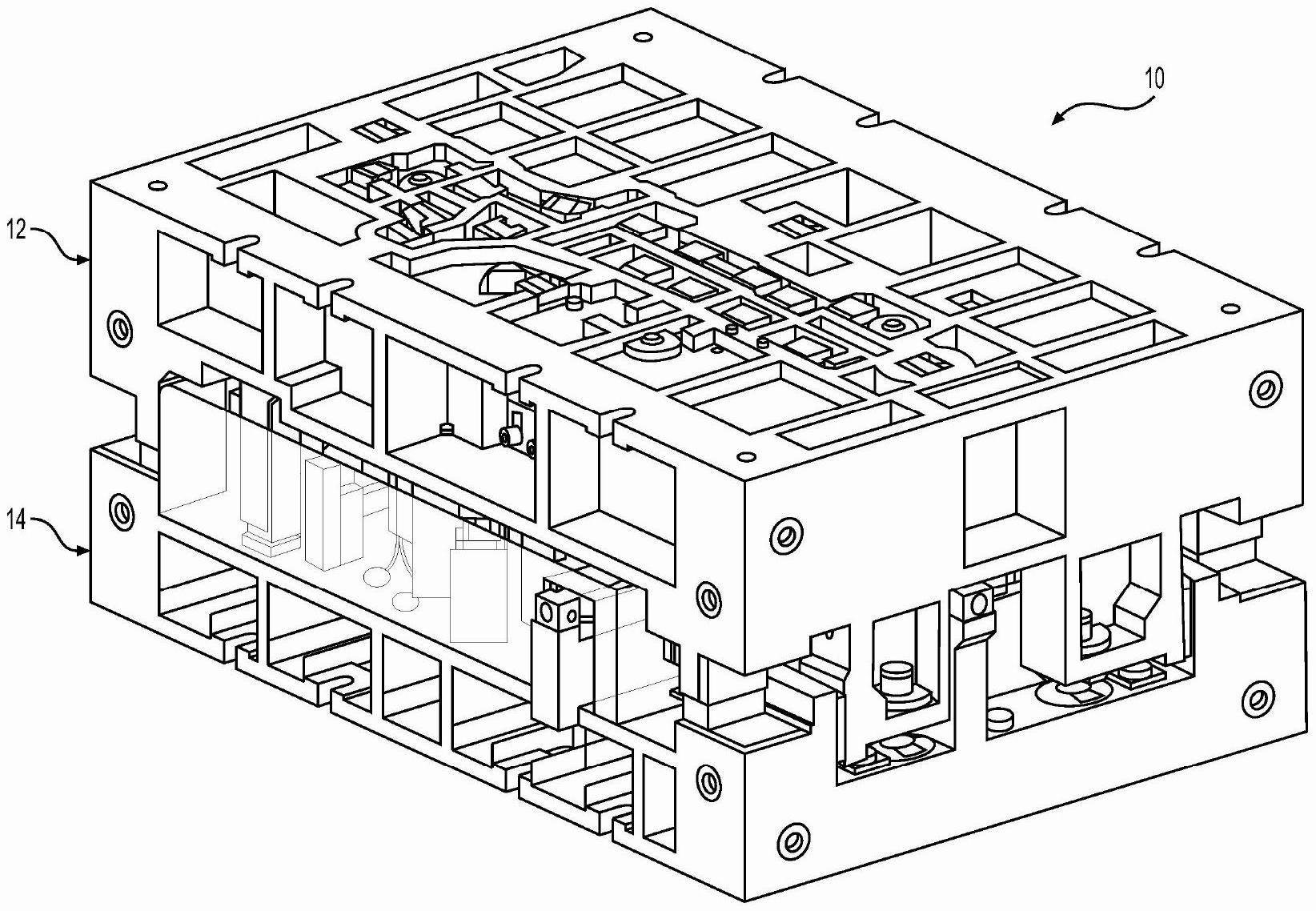
23.图2是本发明实施例1的传感器焊接机内部示意图。
24.图3是本发明实施例1的元器件定位组件示意图。
25.图4是图3中a处的放大图。
26.图5是图3的俯视图。
27.图6是本发明实施例1的元器件定位组件另一示意图。
28.图7是图6中a处的放大图。
29.图8是本发明实施例1的底座示意图。
30.图9是本发明实施例1的内套筒示意图。
31.图10是本发明实施例1的内套筒内部结构示意图。
32.图11是本发明实施例2的底座局部结构示意图。
33.图12是本发明实施例2的底座俯视示意图。
34.附图标记:
100、外壳;200、焊接组件;300、电路板;400、元器件定位组件;500、元器件;501、正极引脚;502、负极引脚;1、外套筒;2、内套筒;21、上套筒;22、下套筒;23、螺旋滑槽;24、限位环;3、底座;31、环形滑槽;32、定位块;4、连接臂;5、连接架;51、连接上杆;52、连接下杆;53、限位凸起;6、挡板;7、摆动杆;71、滑动槽;8、定位板;81、第一定位孔;82、第二定位孔;9、配合槽;10、滑台;101、纵移杆;102、横移杆;11、第一驱动件;12、传送通道;13、拨杆。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
35.实施例1:如图1至图2所示,本发明实施例的传感器焊接机包括:外壳100、电路板定位组件、焊接组件200和元器件定位组件400。
36.电路板定位组件设在所述外壳100内部,并将外壳100分为上部区域和下部区域,电路板定位组件用于定位电路板300,从而确定电路板300的焊接位置以及防止电路板300在焊接时晃动。外壳100上部区域的侧壁上设有活动门,活动门与外壳100转动连接,打开活动门从而实现将电路板300放置在电路板定位组件上以及焊接完成后取出电路板300。
37.焊接组件200包括机械臂及焊接部件,机械臂的一端固定在外壳100内,另一端设有焊接部件,通过机械臂的运动使得焊接部件可以在外壳100的上部区域空间内移动。
38.如图3至图10所示,元器件定位组件400包括外套筒1、内套筒2和底座3。外套筒1设在外壳100下部区域内,内套筒2滑移配合在外套筒1内,内套筒2与外套筒1之间摩擦配合,内套筒2可以沿上下方向相对外套筒1移动。内套筒2分为上套筒21和下套筒22,下套筒22内壁上设有螺旋滑槽23,底座3是环形结构,底座3的外壁上设有连接臂4,连接臂4的一端转动配合在底座3外壁上,连接臂4的另一端设有滑块,底座3通过滑块滑移配合在螺旋滑槽23内,底座3可以在内套筒2内上下移动,由于滑块配合在螺旋滑槽23内,当底座3上下移动时滑块会在螺旋滑槽23内移动,从而实现底座3相对内套筒2转动。底座3内壁上还设有定位槽,定位槽有多个,且沿着周向平均间隔分布在底座3内壁上,每个定位槽内均设有定位块32,定位块32的一端通过第二弹性件与定位槽连接,另一端呈圆弧状,第二弹性件是压簧,在压簧的作用下定位块32的圆弧端伸出定位槽。
39.如图4、图8和图10所示,底座3外壁上设有环形滑槽31,底座3与内套筒2之间设有连接架5,连接架5是伸缩杆,包括连接上杆51和连接下杆52,连接下杆52的一端滑移配合在底座3的环形滑槽31内,其顶端滑移配合在连接上杆51内,连接下杆52的顶端与连接上杆51之间通过压簧连接,连接上杆51的外壁上设有限位凸起53。内套筒2内壁上设有限位环24,连接架5的顶端穿过限位环24并与限位环24滑移配合,连接架5的顶端设有挡板6,挡板6与连接架5之间通过扭簧转动连接。底座3上下移动时连接架5和挡板6与底座3同步上下移动,当底座3相对于内套筒2转动时,由于限位环24的限位,连接架5及挡板6仅可以上下移动,连接架5的底端沿着底座3外壁上的环形滑槽31滑动。当连接架5向上移动至限位凸起53的顶端与限位杆接触时,由于限位凸起53的阻碍使得连接上杆51相对限位环24保持静止,连接下杆52随着底座3同步向上移动,连接下杆52相对连接上杆51向上移动,压簧收缩,连接架5
收缩。当底座3向下移动时,连接下杆52向下移动,压簧伸张,当连接架5恢复原有长度时,连接上杆51与连接下杆52同步向下移动。
40.如图3、图4和图10所示,上套筒21的内壁两侧均设有摆动杆7,摆动杆7的底部通过卷簧与上套筒21侧壁转动连接。摆动杆7的内壁设有沿上下方向分布的滑动槽71,滑动槽71的底端与螺旋滑槽23的顶端连通。两个摆动杆7的顶端分别设有呈半圆形的定位板8,两个定位板8互相止抵从而形成圆形结构,圆形结构上具有两个间隔分布的第一定位孔81和第二定位孔82。外套筒1上端两侧分别设有与摆动杆7对应的配合槽9。当底座3上的滑块移动至螺旋滑槽23的顶端时可以进入滑动槽71内,底座3继续向上移动至与滑动槽71的顶端止抵可以带动内套筒2同步向上移动,当摆动杆7与配合槽9对齐时,在卷簧的驱动下使得摆动杆7顶端向外摆动,使得两个定位板8分离,由于滑块配合在滑动槽71内,滑块与摆动杆7同步运动,使得连接臂4相对底座3转动。当底座3上的滑块移动至螺旋滑槽23的底端时,底座3带动内套筒2同步向下移动,外套筒1的侧壁可以将摆动杆7推至与内套筒2侧壁平齐,使得两个定位板8在内套筒2顶端互相靠近并止抵。
41.如图1至图3所示,外套筒1的底部设有滑台10,滑台10包括纵移杆101和横移杆102,纵移杆101有两个,且沿着左右方向间隔分布,每个横移杆102上均设有沿前后方向延伸的纵移滑槽,横移杆102的两端分别与两个纵移滑槽滑动配合,横移杆102上设有横移滑槽,外套筒1的底端滑动配合在横移滑槽内,通过外部电源驱动滑台10可以实现外套筒1在左右方向和前后方向的移动,从而实现元器件定位组件400在水平面内的移动。
42.外套筒1底部设有第一驱动件11,第一驱动件11是气缸,气缸的顶端滑移配合有推杆,推杆的顶端可以与底座3止抵,气缸可以推动底座3向上移动,当气缸与底座3分离时,底座3可以在重力的作用下向下移动。推杆的顶部设有泄压阀,当气缸内的压力高于设定值时,泄压阀可将气缸内的气体向外排出。
43.外壳100侧壁上设有传送通道12,传送通道12内设有传送带,传送通道12的一端延伸出外壳100,另一端伸入下部区域内,外套筒1的侧壁在传送通道12相应位置处设有进料口,通过滑台10的驱动使得外套筒1与传送通道12平齐,元器件500可以通过传送带运至外壳100内部并从进料口处进入外套筒1内。
44.根据本发明实施例1的传感器焊接机,通过滑台10将外套筒1移至传送通道12处,然后气缸的推杆快速下降至与进料口底端平齐,由于内套筒2与外套筒1之间具有摩擦力,底座3在重力的作用下向下移动,并带动内套筒2克服摩擦力缓慢向下移动,元器件500在内套筒2及底座3未下落至推杆上时被通过传送带送入外套筒1内,推杆的顶端可以托举元器件500,然后通过滑台10将元器件定位组件400移动至电路板300待焊区域的正下方,此时第一定位孔81和第二定位孔82与电路板300上的金属过孔对应。
45.当内套筒2下落至最低处时,元器件500穿过底座3,直至底座3的底端与推杆止抵,在元器件500穿过底座3的过程中元器件500会与定位块32止抵并推动定位块32向外移动,使得每个第二弹性件均收缩,若两侧的第二弹性件受力不平衡会通过定位块32推动元器件500在水平面内移动,直至所有的第二弹性件受力平衡,此时第二元器件500与底座3同轴分布。此时挡板6的高度高于元器件500负极引脚502的顶端且低于其正极引脚501的顶端。然后向气缸内加压,推杆推动底座3向上移动,挡板6同步向上移动,底座3上的滑块沿螺旋滑槽23移动,使得底座3相对挡板6和内套筒2转动,元器件500的侧壁与定位块32的端部止抵,
在摩擦力的作用下元器件500与底座3同步转动。当元器件500的正极引脚501与挡板6止抵时,在挡板6的作用下元器件500停止转动,此时元器件500的正极引脚501位于第一定位孔81的正下方,其负极引脚502位于第二定位孔82的正下方。推杆继续推动底座3向上移动,连接架5上的限位凸起53与限位环24止抵,使得连接上杆51相对内套筒2静止,挡板6停止向上移动,元器件500继续向上移动,其顶端会推动挡板6转动,避免挡板6阻碍元器件500向上移动,元器件500的正负极引脚502分别穿过第一定位孔81和第二定位孔82并伸入电路板300的金属过孔内。当底座3上的滑块移至螺旋滑槽23顶端时,滑块会进入滑动槽71内并继续向上移动,此时底座3停止转动。当内套筒2上移至摆动杆7与配合槽9对齐时,摆动杆7的顶端在卷簧的作用下向外转动,使得两个半圆形的定位板8分离,元器件500的顶端可以与电路板300的底面止抵。从而实现对元器件500的定位。
46.当元器件500的底面电路板300的底面止抵后,持续对气缸输入空气,使得推杆持续的对元器件500施加向上的推力,防止元器件500在焊接过程中上下移动。当气缸内压力高于设定值时,泄压阀会将气缸内的多余气体排出,排出的气体形成气流并在内套筒2内流动,从而可以对焊点处进行散热。
47.实施例2:如图11和图12所示,本发明实施例的传感器焊接机结构与实施例1基本相同,不同点在于:底座3内侧还设有拨杆13,拨杆13有两个,且呈中心对称分布在底座3内壁上,拨杆13的端部通过卷簧与底座3内壁转动连接。
48.当待焊元器件500进入外套筒1内时,底座3在重力的作用下向下移动,并带动内套筒2同步向下移动,滑块会沿着下套筒22内壁的螺旋滑槽23向下移动,实现底座3的转动,两个拨杆13均与底座3同步运动,两个拨杆13会分别与元器件500的正极引脚501和负极引脚502止抵,两个拨杆13的底端与元器件500顶端止抵。当底座3继续向下移动时,元器件500的顶端会对拨杆13施加向上的压力使得拨杆13绕拨杆13与元器件500的连接处转动,拨杆13在转动过程中可以将弯折的正极引脚501或负极引脚502拨直,从而防止元器件500的引脚因弯折而无法对齐电路板300的金属过孔。
49.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
50.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
51.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。