1.本发明涉及一种控制机器人园林工具的方法、系统、计算机程序和计算机程序产品。
背景技术:
2.市场上的机器人园林工具通常用于修剪草坪或清洁游泳池,以及其他园林活动。为了将机器人园林工具保持在特定工作区域内或将机器人园林工具带回充电站,已使用边界线和其他类型的引导线与不同的天线相结合。有不同类型的方法覆盖特定的工作区域,例如,让机器人园林工具随机工作。
3.安装机器人园林工具的外围设备,例如,边界线、引导线等。在启动系统之前,用户需要付出相对较大的努力。此外,在系统的生命周期中,这些外围设备可能至少被外部因素损坏一次。
4.有一种方法,其中,机器人园林工具在工作区域内随机移动,将导致该区域最终被覆盖。然而,这种方法在所需时间和能源效率方面都不是最佳方法。
5.因此,希望以改进的方式完成控制机器人园林工具的方法和系统。
技术实现要素:
6.因此,本发明的目的是实现一种以改进的方式控制机器人园林工具的方法和系统。
7.根据一个方面,本发明涉及一种由机器人园林系统执行的用于控制机器人园林工具的方法。该系统包括机器人园林工具、控制单元和数据库。该方法包括通过控制单元从数据库中检索该机器人园林工具的预定路线的步骤。该预定路线在工作区域内。该预定路线存储在数据库中的路线数据集中。预定路线基于行驶角度。行驶角度是从位于工作区域内的机器人园林工具的起点延伸的角度。工作区域限定了机器人园林工具的行程。所述路线数据集包括多个预定路线。每个预定路线具有与所有其他预定路线的所有其他行驶角度基本不同的行驶角度。该方法还包括通过控制单元控制机器人园林工具从起点开始,并沿着检索到的预定路线移动的步骤。
8.使用不同的预定路线,其行进角度与所有其他预定路线的所有其他行驶角度不同,提供了一种解决方案,可以防止表面上的永久性标记或不必要的磨损。如果机器人园林工具是机器人割草机,则草坪中的永久痕迹将被避免。此外,如果机器人园林工具是割草机,则可以在草坪中创建不同的图案。
9.上述方法可根据不同的可选实施例进行配置。例如,在该方法之前,可以先定义工作区域,并在数据库中存储定义工作区域的多个地理数据点。
10.通过以这种方式定义工作区域,可以为每个特定的安装定义一次工作区域,并且可以为未来的每个工作会话检索地理数据点中描述的工作区域。
11.根据本发明的实施例,该方法还可以包括通过控制单元控制机器人园林工具的步骤,以便在进行任何进一步活动之前遵循所定义和存储的工作区域,使得用户能够确认存储的工作区域是正确的。
12.通过让用户在激活机器人园林工具之前确认存储的工作区域,该机器人园林工具可以作为一种强大的控制机制来对抗定义不明确的工作区域。这种功能可以防止事故以及对人员和财产的损害。
13.根据本发明的实施例,工作区域的界定可以包括界定工作区域的边界。
14.边界是工作区域的一个基本要素,因此,界定边界非常重要。
15.根据本发明的实施例,边界步骤的定义可以包括通过控制单元来控制机器人园林工具以遵循工作区域的边界。
16.控制机器人园林工具以物理方式遵循工作区域的边界是一种非常有效和安全的定义方式。
17.根据本发明的实施例,工作区域的定义步骤可以包括定义工作区域的障碍物的边界。
18.障碍物是工作区域的基本要素,因此,定义障碍物非常重要。
19.根据本发明的实施例,在预定路线的检索步骤中,可以根据机器人园林工具在工作区域内的匝数最小化的标准来选择预定路线。
20.通过使用一种根据机器人园林工具在工作区域内的匝数的最小化标准选择预定路线的方法,可以对完全覆盖工作区域并尽快完成做出有价值的贡献。这意味着使用机器人园林工具对环境的影响和对机器人园林工具机械的压力都将降低。
21.根据本发明的实施例,行驶角度可以在0至180
°
的范围内或在0至360
°
的范围内。
22.可以在两个所述范围之间进行选择将提供非常有效和非常灵活的路径规划。
23.根据本发明的实施例,定位单元可以与用于控制机器人园林工具的控制单元组合以遵循检索到的预定路线,和/或,定位单元可以用于提供多个地理数据点以便可以定义工作区域。
24.使用这样的定位单元可以提供非常精确的控制功能和非常精确的工作区域定义功能。
25.根据本发明的实施例,该方法还包括通过控制单元检索信号。该信号指示机器人园林工具应该移动到的预定位置。进一步,该方法包括在数据库中存储与机器人园林工具当前地理位置相对应的地理数据点,通过控制单元控制机器人园林工具移动到预定位置,通过控制单元控制机器人园林工具在预定位置进行特定的活动,在所述预定位置的特定的活动完成后,通过控制单元控制机器人园林工具返回到与存储的地理数据点对应的地理位置,并通过控制单元控制机器人园林工具继续沿检索到的预定路线移动。
26.所述方法为机器人园林工具提供了暂停其当前任务的可能性,以便进行另一项重要活动,并随后恢复其任务。
27.根据本发明的实施例,机器人园林工具的控制步骤可以包括:通过所述机器人园林工具沿行驶角度直线移动,在到达工作区域的边界时转弯,沿与行驶角度相反的直线方向移动,在到达工作区域的边界时转弯,沿行驶角度直线移动,并且,继续执行上述步骤,使得机器人园林工具逐车道覆盖工作区域。
28.所述方法提供了以更有效的方式完全覆盖整个工作区域的可能性。此外,如果机器人园林工具是割草机,则可以更有效地在草坪中创建不同的图案。
29.根据一个方面,本发明涉及用于控制机器人园林工具的机器人园林系统。该系统包括机器人园林工具、控制单元和数据库。该系统被配置为通过控制单元从数据库中检索机器人园林工具的预定路线。预定路线在工作区域内。预定路线存储在数据库中的路线数据集中。预定路线基于行驶角度。行驶角度是从位于工作区域内的机器人园林工具的起点延伸的角度。工作区域限定了机器人园林工具的行程。路线数据集包括多个预定路线,并且每个预定路线具有与所有其他预定路线的所有其他行驶角度基本不同的行驶角度。此外,系统被配置为通过控制单元来控制机器人园林工具从起点开始,并沿着检索到的预定路线移动。
30.这种系统使用不同的预定路线,其具有与所有其他预定路线的所有其他行驶角度不同的行驶角度,提供了一种解决方案,可以防止表面上的永久性标记或不必要的磨损。如果机器人园林工具是机器人割草机,则草坪中的永久核痕迹将被避免。此外,如果机器人园林工具是割草机,则可以在草坪中创建不同的图案。
31.根据另一方面,计算机程序包括计算机可读代码装置,其当在控制单元上运行时导致系统执行相应的方法。
32.根据另一方面,计算机程序产品包括计算机可读介质和计算机程序。计算机程序存储在计算机可读介质上。
33.机器人园林工具可以是机器人割草机等。
34.控制单元可以位于机器人园林工具的内部或外部。如果位于外部,它可以位于机器人园林工具的充电站等。
35.数据库可以位于机器人园林工具外部,例如,在云解决方案中,也可以位于机器人园林工具内的物理数据存储设备内部。
36.工作区域可以是较大工作区域的子区域。
37.多个工作区域可以相互重叠。
38.定位单元可以是gnss设备,例如gps设备,rtk设备等。
39.预定位置可以是充电站、用于下载数据的站等的位置。
40.例如,某些活动可能是专注于为机器人园林工具的电池充电、更新机器人园林工具的软件或等待对机器人园林工具进行特定手动维护等的活动。
41.当机器人园林工具转弯并沿着行驶角度相反的下一条车道行驶时,机器人园林工具可能会与前一条车道略微重叠或根本不与前一条车道重叠。后者可以通过控制机器人园林工具与前一条车道接壤来实现。在计算所需结果时,必须考虑不同机器人园林工具的不同工作宽度。
42.行驶角度可以随机确定,也可以根据预定的时间表确定。
43.在机器人园林工具开始沿着检索到的预定路线移动之前,有关路线的信息,例如,行驶角度等,可以发送给机器人园林工具的所有者/用户,以便所有者/用户接受或拒绝启动特定的预定路线。
44.定位单元与控制单元的组合可用于控制机器人园林工具遵循检索到的所有权利要求的预定路线,并且还用于定义所有描述权利要求的工作区域,用于能够在数据库中存
储定义工作区域的多个地理数据点。
附图说明
45.下面将结合说明书附图以示例性实施例描述本发明,其中:
46.图1是根据一个实施例的程序的流程图。
47.图2是根据一个实施例的程序的流程图。
48.图3是根据一个实施例的程序的流程图。
49.图4是根据一个实施例的程序的流程图。
50.图5是根据一个实施例的程序的流程图。
51.图6是根据可能的实施例示出的控制单元的方框图。
52.图7是根据可能的实施例与用户连接的机器人园林系统的框图。
53.图8是根据本发明的实施例示出与其周围环境相关的机器人园林工具,以及
54.图9是根据本发明的一个实施例的透视图中的预定路线,以及
55.图10是根据本发明的一个实施例的透视图中的预定路线,以及
56.图11是根据本发明的一个实施例的透视图中的预定路线,以及
57.图12是根据本发明的一个实施例的透视图中的预定路线。
具体实施方式
58.在下文中,提供了用于控制机器人园林工具的方法、系统、计算机程序和计算机程序产品的详细描述。
59.图1示出了系统中一个过程的流程图。各种操作的顺序可能与本描述中所示的顺序不同,或者与本说明或与此描述相关的其他流程图中显示的顺序不同,或者某些步骤可以并行执行。
60.在步骤s100中,通过控制单元13从数据库2检索用于机器人园林工具1的预定路线3。预定路线3位于工作区域4内。预定的路线3存储在数据库2的路线数据集5中。预定路线3基于行驶角度6。所述行驶角度6是位于工作区域4内的机器人园林工具1从起点7延伸的角度,工作区域4界定了机器人园林工具1的行程。路线数据集5包括多个预定路线3a......n,并且每个预定路线3具有与所有其他预定路线的所有其他行驶角度基本不同的行驶角度6。此外,机器人园林工具1通过控制单元13,从起点7开始,并沿检索到的预定路线3移动。在步骤s110中,机器人园林工具1通过控制单元13从起点7开始并沿检索到的预定路线3移动。
61.图2示出了系统中一个过程的流程图。各种操作的顺序可能与本描述中所示的顺序不同,或者与本说明或与此描述相关的其他流程图中显示的顺序不同,或者某些步骤可以并行执行。
62.在步骤s200中定义工作区域4。在步骤s210中,定义了工作区域4的多个地理数据点8被存储在数据库2中。
63.图3示出了系统中一个过程的流程图。各种操作的顺序可能与本描述中所示的顺序不同,或者与本说明或与此描述相关的其他流程图中显示的顺序不同,或者某些步骤可以并行执行。
64.在步骤s300中,控制单元检索信号12。信号12指示机器人园林工具1应该移动到预
定位置14。在步骤s310中,对应于机器人园林工具1的当前地理位置的地理数据点8被存储在数据库2中。在步骤s320中,机器人园林工具1被控制单元13控制移动到预定位置14。在步骤s330中,机器人园林工具1通过控制单元13在预定位置14进行特定活动。在步骤s340中,机器人园林工具1通过控制单元13在所述预定位置完成特定活动后返回对应于存储的地理数据点的地理位置。在步骤s350中,通过控制单元13控制机器人园林工具1继续沿检索到的预定路线3移动。
65.图4示出了说明系统中一个过程的流程图。各种操作的顺序可能与本描述中所示的顺序不同,或者与本说明或与此描述相关的其他流程图中显示的顺序不同,或者某些步骤可以并行执行。
66.在步骤s400中,控制单元13控制机器人园林工具1沿行驶角度5直线移动。在步骤s410中,控制单元13控制机器人园林工具1在到达工作区域4的边界9时转动。在步骤s420中,控制单元13控制机器人园林工具1沿与行驶角度5相反的方向上直线移动。在步骤s430中,控制单元13控制机器人园林工具1在到达工作区域4的边界9时转动。在步骤s440中,控制单元13控制机器人园林工具1沿行驶角度5直线移动,并继续所述步骤使得机器人园林工具1逐车道覆盖工作区域4。
67.图5示出了说明系统中一个过程的流程图。各种操作的顺序可能与本描述中所示的顺序不同,或者与本说明或与此描述相关的其他流程图中显示的顺序不同,或者某些步骤可以并行执行。
68.在步骤1.1中,通过控制单元13从数据库2中检索机器人园林工具1的预定路线3。预定路线3位于工作区域4内。预定路线3存储在数据库2的路线数据集5中。预定路线3基于行驶角度6。所述行驶角度6是从位于工作区域4内的机器人园林工具1的起点7延伸的角度,工作区域4界定了机器人园林工具1的行程。路线数据集5包括多个预定路线3a......n,并且每个预定路线3具有与所有其他预定路线的所有其他行驶角度基本上不同的行驶角度6。在步骤1.2中,机器人园林工具1通过控制单元13从起点7开始,并沿检索到的预定路线3移动。
69.图6示出了控制单元13,包括诸如处理器13.a、用户界面13.b、存储器13.c和通信网关13.d等组件。
70.图7示出了控制单元13、数据库2、机器人园林工具1和用户的用户界面13.b。所述数据库2、机器人园林工具1、以及用户被连接到控制单元13。
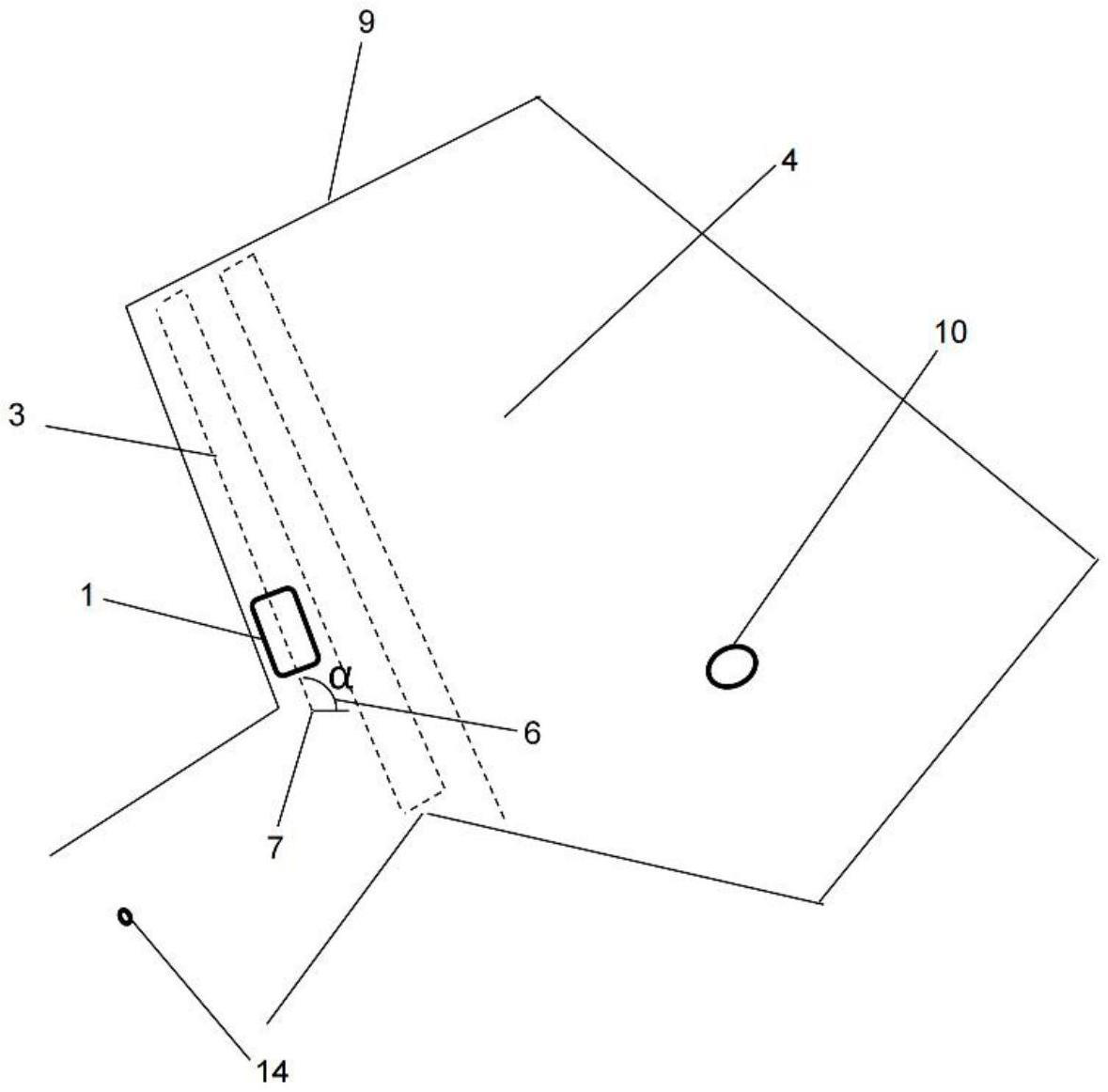
71.图8示出了机器人园林系统15和机器人园林工具1,相对于预定路线3、工作区域4、行驶角度6、机器人园林工具7的起点、工作区域9的边界、障碍物10和预定位置14。
72.图9至图12示出了基于不同类型的行驶角度和不同机器人园林工具的不同类型的工作宽度,显示了不同类型的预定路线。
73.附图标记列表
74.1机器人园林工具
75.2数据库
76.3预定路线
77.3a......n多个预定路线
78.4工作区域
79.5路线数据集
80.6行驶角度
81.7机器人园林工具的起点
82.8地理数据点
83.9工作区域边界
84.10工作区域障碍物
85.11定位单元
86.12控制单元的信号
87.13控制单元
88.14预定位置
89.15机器人花园系统
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。