1.本公开涉及信息处理装置、信息处理方法以及非临时性存储介质。
背景技术:
2.在日本特开2021-153421中公开了具有自动转向功能的作业车辆。
技术实现要素:
3.使作业车辆在公路上自动行驶的技术存在改善的余地。
4.本公开提供一种改善使作业车辆在公路上自动行驶的技术。
5.本公开的第1方式是包括处理器的信息处理装置。所述处理器构成为生成跟随指令,该跟随指令指示跟随具有自动行驶功能的自主车辆或无人飞行器的跟随行驶,所述处理器构成为向具有跟随行驶功能的作业车辆发送所述跟随指令。
6.在所述第1方式中,所述处理器可以构成为检测表示所述跟随行驶的不稳定性的指标是否为规定的阈值以上。所述处理器可以构成为当检测到所述指标为所述规定的阈值以上时,将第1停止指令或第2停止指令发送至所述作业车辆。所述第1停止指令可以是使所述作业车辆在当前的场所停止的指令。所述第2停止指令可以是使所述作业车辆在退避行驶之后停止的指令。
7.在所述第1方式中,所述处理器可以构成为当判断为在所述作业车辆的周边存在障碍物时,经由所述通信部将使所述作业车辆在原地停止的第1停止指令发送至所述作业车辆。所述第1停止指令可以是使所述作业车辆在当前的场所停止的指令。
8.在所述第1方式中,所述处理器可以构成为基于由所述作业车辆获取的所述作业车辆的周边信息,判断是否存在所述障碍物。
9.在所述第1方式中,所述处理器可以构成为在所述作业车辆停止后经过规定时间之后,向所述作业车辆再次发送所述跟随指令。
10.在所述第1方式中,所述处理器可以构成为进行向所述作业车辆的周边区域通知所述作业车辆正在跟随行驶的控制。
11.在所述第1方式中,所述处理器构成为基于所述作业车辆的大小,选择所述自主车辆的行驶路线或所述无人飞行器的飞行路线。
12.本公开的第2方式是用于由信息处理装置执行的信息处理方法。所述信息处理方法包括:生成跟随指令,该跟随指令指示跟随具有自动行驶功能的自主车辆或无人飞行器的跟随行驶;以及向具有跟随行驶功能的作业车辆发送所述跟随指令。
13.在所述第2方式中,所述信息处理方法可以包括:当检测到表示所述跟随行驶的不稳定性的指标为规定的阈值以上时,将第1停止指令或第2停止指令发送至所述作业车辆。所述第1停止指令可以是使所述作业车辆在当前的场所停止的指令。所述第2停止指令可以是使所述作业车辆在退避行驶之后停止的指令。
14.在所述第2方式中,所述信息处理方法可以包括:当判断为在所述作业车辆的周边
存在障碍物时,将第1停止指令发送至所述作业车辆。所述第1停止指令可以是使所述作业车辆在当前的场所停止的指令。
15.在所述第2方式中,所述信息处理方法可以包括:基于由所述作业车辆获取的所述作业车辆的周边信息,判断是否存在所述障碍物。
16.在所述第2方式中,所述信息处理方法可以包括:在所述作业车辆停止后经过规定时间之后,向所述作业车辆再次发送所述跟随指令。
17.在所述第2方式中,所述信息处理方法可以包括:进行向所述作业车辆的周边通知所述作业车辆正在跟随行驶的控制。
18.在所述第2方式中,所述信息处理方法可以包括:基于所述作业车辆的大小,选择所述自主车辆的行驶路线或所述无人飞行器的飞行路线。
19.本公开的第3方式是非临时性存储介质,存储命令,该命令能够由计算机中的一个或多个处理器执行,且使所述一个或多个处理器执行以下的功能。所述功能包括:生成跟随指令,该跟随指令指示跟随具有自动行驶功能的自主车辆或无人飞行器的跟随行驶;以及向具有跟随行驶功能的作业车辆发送所述跟随指令。
20.在所述第3方式中,所述功能可以包括:当检测到表示所述跟随行驶的不稳定性的指标为规定的阈值以上时,向所述作业车辆发送使所述作业车辆在原地停止的第1停止指令或使所述作业车辆在退避行驶之后停止的第2停止指令。所述第1停止指令可以是使所述作业车辆在当前的场所停止的指令。所述第2停止指令可以是使所述作业车辆在退避行驶之后停止的指令。
21.在所述第3方式中,所述功能可以包括:当判断为在所述作业车辆的周边存在障碍物时,将第1停止指令发送至所述作业车辆。所述第1停止指令是使所述作业车辆在当前的场所停止的指令。
22.在所述第3方式中,所述功能可以包括基于由所述作业车辆获取的所述作业车辆的周边信息,判断是否存在所述障碍物。
23.在所述第3方式中,所述功能可以包括:在所述作业车辆停止后经过规定时间之后,向所述作业车辆再次发送所述跟随指令。
24.在所述第3方式中,所述功能可以包括:进行向所述作业车辆的周边通知所述作业车辆正在跟随行驶的控制。
25.根据本公开的所述第1方式、所述第2方式以及所述第3方式,能够改善使作业车辆在公路上自动行驶的技术。
附图说明
26.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中相同的符号表示相同的元件,并且其中:
27.图1是示出本公开的一个实施方式的系统的概略结构的框图。
28.图2是示出本公开的一个实施方式的车辆的概略结构的框图。
29.图3是示出本公开的一个实施方式的信息处理装置的概略结构的框图。
30.图4是示出本公开的一个实施方式的作业车辆的概略结构的框图。
31.图5是示出本公开的一个实施方式的信息处理装置的动作的流程图。
32.图6是示出本公开的一个变形例的无人飞行器的概略结构的框图。
具体实施方式
33.以下,对本公开的实施方式进行说明。
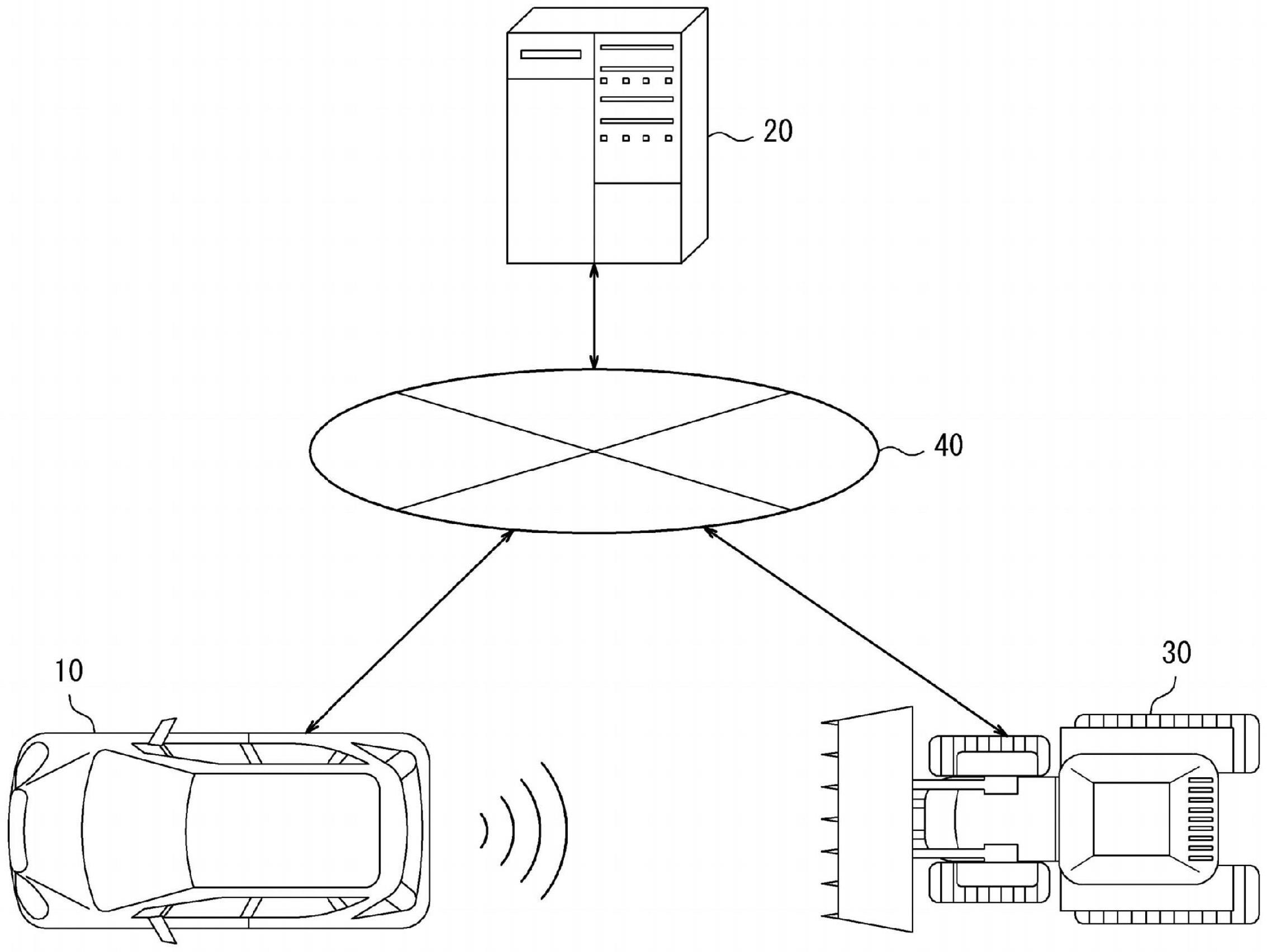
34.参照图1,对本公开的实施方式的系统1的概要进行说明。
35.系统1具备车辆10、信息处理装置20、作业车辆30。车辆10、信息处理装置20以及作业车辆30与网络40可通信地连接。
36.车辆10是具有以任意等级自动驾驶的自动行驶功能的汽车等普通车辆。汽车例如为汽油汽车、bev(battery electric vehicle,电动汽车)、hev(hybrid electric vehicle,混合动力电动汽车)、phev(plug-in hybrid electric vehicle,插电式混合动力汽车)或fcev(fuel cell electric vehicle,燃料电池电动汽车)等,但不限于此。
37.信息处理装置20是属于云计算系统或其它计算系统的服务器等计算机,但不限于此。
38.作业车辆30是具有能够一边将与车辆10(前导车辆)之间的车间距离保持为规定的值一边自动地跟随车辆10行驶的跟随行驶功能的车辆。作业车辆30例如为拖拉机、插秧机或联合收割机等农业机械,但不限于此。此外,作业车辆30的数量可以任意地设定。
39.网络40包括互联网、至少一个wan(wide area network,广域网)、至少一个man(metropolitan area network,城域网)或这些网络的任意组合。网络40可以包括至少一个无线网络、至少一个光网络或这些网络的任意组合。无线网络例如为自组网、蜂窝网络、无线lan(local area network,局域网)、卫星通信网络或地面微波网络。
40.参照图1,对本实施方式的概要进行说明。
41.信息处理装置20的控制部21生成跟随指令,该跟随指令指示跟随具有自动行驶功能的车辆10的跟随行驶。另外,信息处理装置20的控制部21经由通信部22向具有跟随行驶功能的作业车辆30发送跟随指令。
42.在此,为了削减人工费,期望使作业车辆30除了在私人道路以及农田等上自动行驶以外,也在公路等上自动行驶。另一方面,如果为了使作业车辆30在公路等上自动行驶,除了作业车辆30所具备的供农作业的各种传感器之外还在作业车辆30上搭载供在公路等上自动行驶的各种传感器,则作业车辆30的售价上升。根据本实施方式,通过使作业车辆30跟随具有自动行驶功能的车辆10行驶,能够削减人工费,并抑制作业车辆30的售价的上升。因此,能够改善使作业车辆30在公路上自动行驶的技术。
43.参照图2,对本实施方式的车辆10的结构进行说明。
44.车辆10具备控制部11、通信部12、存储部13、获取部14。
45.控制部11包括至少一个处理器、至少一个可编程电路、至少一个专用电路或这些电路的任意组合。处理器为cpu(central processing unit,中央处理单元)或gpu(graphics processing unit,图形处理单元)等通用处理器或专用于特定处理的专用处理器。可编程电路例如为fpga(field-programmable gate array,现场可编程门阵列)。专用电路例如为asic(application specific integrated circuit,专用集成电路)。控制部11与获取部14协作,实现车辆10的自动行驶。具体而言,控制部11使用由获取部14获取的信息,进行车辆10的转向控制、加速控制以及制动控制等。此外,自动行驶例如包括sae
(society of automotive engineers,汽车工程师学会)定义的等级1至5,但不限于此,可以任意地定义。
46.通信部12包括与网络40连接的一个以上的通信接口。通信接口例如与4g(4th generation,第4代)或5g(5th generation,第5代)等移动通信标准对应,但不限于此。通信部12接收用于车辆10的动作的数据,并且发送通过车辆10的动作所获得的数据。
47.存储部13包括至少一个半导体存储器、至少一个磁存储器、至少一个光存储器或这些存储器的任意组合。半导体存储器例如为ram(random access memory,随机存取存储器)或rom(read only memory,只读存储器)。ram例如为sram(static random access memory,静态随机存取存储器)或dram(dynamic random access memory,动态随机存取存储器)。rom例如为eeprom(electrically erasable programmable read only memory,电可擦除可编程只读存储器)。存储部13例如作为主存储装置、辅助存储装置或高速缓冲存储器发挥功能。在存储部13中存储有用于车辆10的自动行驶的任意信息。
48.获取部14包括一个以上的传感器模块。传感器模块例如为速度传感器、加速度传感器、角速度传感器、lidar(light detection and ranging,光探测和测距,或laser imaging detection and ranging,激光成像探测与测距)或转向器操舵角传感器等,但不限于此。传感器模块获取车辆10的行驶信息。另外,获取部14包括一个以上的定位模块。定位模块例如是与gps(global positioning system,全球定位系统)、qzss(quasi-zenith satellite system,准天顶卫星系统)、glonass(global navigation satellite system,全球导航卫星系统)或galileo对应的定位模块等,但不限于此。定位模块获取车辆10的位置信息。
49.参照图3,对本实施方式的信息处理装置20的结构进行说明。
50.信息处理装置20具备控制部21、通信部22、存储部23。
51.控制部21包括至少一个处理器、至少一个可编程电路、至少一个专用电路或这些电路的任意组合。处理器为cpu或gpu等通用处理器或专用于特定处理的专用处理器。可编程电路例如为fpga。专用电路例如为asic。控制部21一边控制信息处理装置20的各单元,一边执行与信息处理装置20的动作有关的处理。
52.通信部22包括与网络40连接的至少一个通信用接口。通信用接口例如与移动通信标准、有线lan标准或无线lan标准对应,但不限于此,也可以与任意的通信标准对应。通信部22接收用于信息处理装置20的动作的数据,并且发送通过信息处理装置20的动作所获得的数据。
53.存储部23包括至少一个半导体存储器、至少一个磁存储器、至少一个光存储器或这些存储器的任意组合。半导体存储器例如为ram或rom。ram例如为sram或dram。rom例如为eeprom。存储部23例如作为主存储装置、辅助存储装置或高速缓冲存储器发挥功能。在存储部23中存储有用于信息处理装置20的动作的数据和通过信息处理装置20的动作所获得的数据。在本实施方式中,用于信息处理装置20的动作的数据包括系统程序、应用程序、数据库以及地图信息等。
54.参照图4,对本实施方式的作业车辆30的结构进行说明。
55.作业车辆30具备控制部31、通信部32、存储部33、获取部34、作业部35。
56.控制部31包括至少一个处理器、至少一个可编程电路、至少一个专用电路或这些
电路的任意组合。处理器为cpu或gpu等通用处理器或专用于特定处理的专用处理器。可编程电路例如为fpga。专用电路例如为asic。控制部31基于经由通信部32从信息处理装置20接收的跟随指令,实现跟随车辆10的跟随行驶。具体而言,控制部31基于跟随指令,进行作业车辆30的转向控制、加速控制以及制动控制等。此外,控制部31能够与获取部34协作来实现作业车辆30在公路以外(例如私人道路或农田等)的自动行驶。
57.通信部32包括与网络40连接的一个以上的通信接口。通信接口例如与4g或5g等移动通信标准对应,但不限于此。通信部32接收用于作业车辆30的动作的数据,并且发送通过作业车辆30的动作所获得的数据。
58.存储部33包括至少一个半导体存储器、至少一个磁存储器、至少一个光存储器或这些存储器的任意组合。半导体存储器例如为ram或rom。ram例如为sram或dram。rom例如为eeprom。存储部33例如作为主存储装置、辅助存储装置或高速缓冲存储器发挥功能。在存储部33中存储有用于作业车辆30的跟随行驶以及自动行驶的任意信息。
59.获取部34包括一个以上的传感器模块。传感器模块例如为速度传感器、加速度传感器、角速度传感器、转向器操舵角传感器或供农作业等的照相机等,但不限于此。传感器模块获取供作业车辆30在公路以外的路上自动行驶的信息。另外,获取部34包括一个以上的定位模块。定位模块例如是与gps(global positioning system,全球定位系统)、qzss(quasi-zenith satellite system,准天顶卫星系统)、glonass(global navigation satellite system,全球导航卫星系统)或galileo对应的定位模块等,但不限于此。定位模块获取作业车辆30的位置信息。
60.作业部35包括用于进行农作业等的一个以上的作业装置。作业装置例如为播撒肥料或农药等的播撒装置、向田地播种的播种装置或收获农作物等的收获装置,但不限于此。作业部35能够通过从作业车辆30供给的电力等被驱动。
61.参照图5,对本实施方式的信息处理装置20的动作进行说明。该动作相当于本公开的一个实施方式的方法。
62.在本例中,车辆10为能够进行无人自动行驶(例如sae定义的等级5的自动驾驶)的普通车辆,设为车辆10在通过后述的方法选择的行驶路线上自动行驶而进行说明。
63.步骤s100:信息处理装置20的控制部21检测跟随车辆10行驶的作业车辆30。
64.具体而言,信息处理装置20的控制部21经由通信部22例如从作业车辆30的用户拥有的用户终端等接收与跟随行驶有关的信息。另外,信息处理装置20的控制部21基于接收的与跟随行驶有关的信息,检测跟随车辆10行驶的作业车辆30。此外,与跟随行驶有关的信息可以包括跟随行驶的作业车辆30的识别信息(车辆号码标等)、以及跟随行驶的开始日期时间、出发地(例如用户的田地)及目的地(例如用户自己家)等,但不限于此。
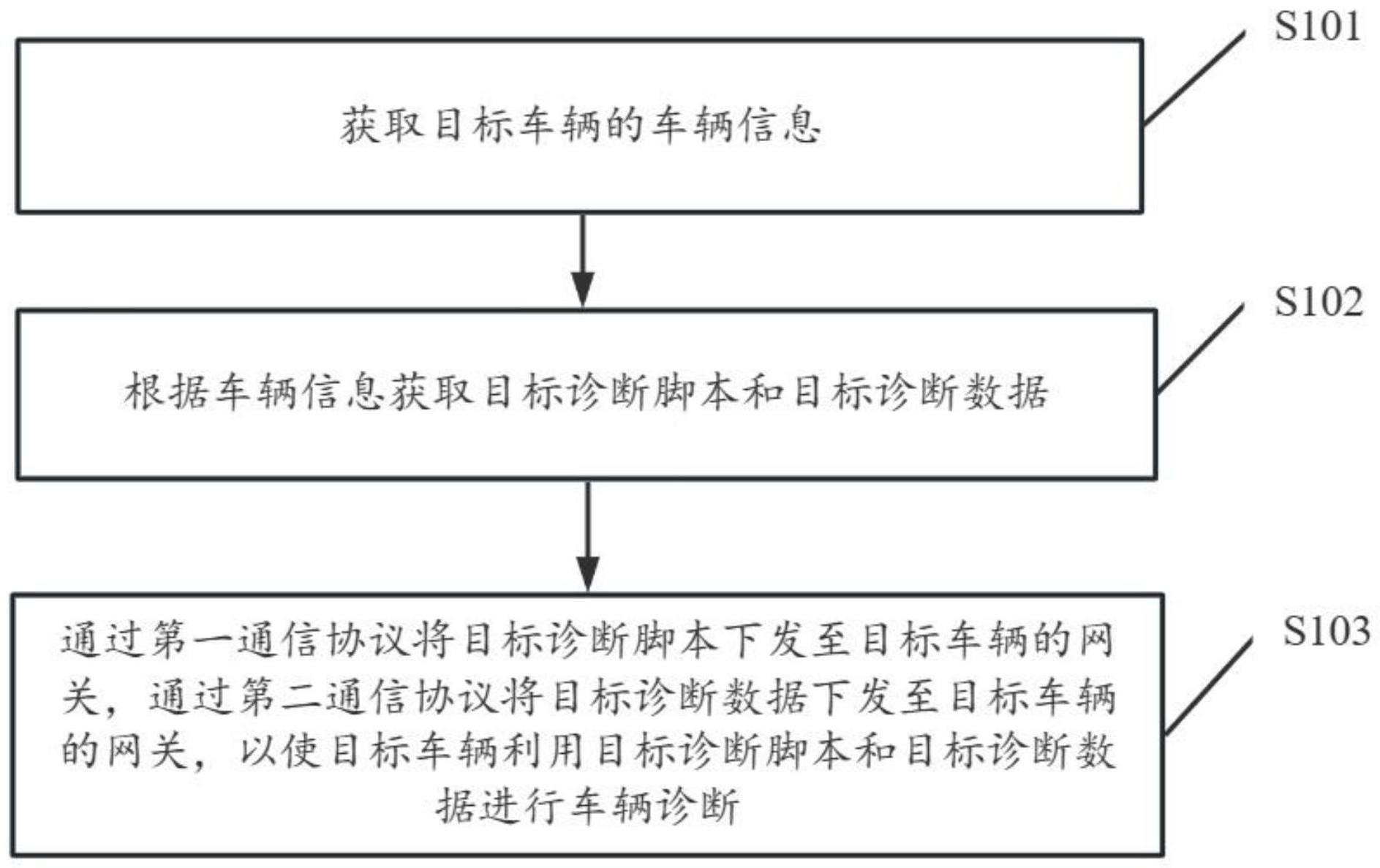
65.步骤s101:信息处理装置20的控制部21生成跟随指令,该跟随指令指示跟随车辆10的跟随行驶。
66.具体而言,信息处理装置20的控制部21基于例如存储部23中存储的地图信息和与上述跟随行驶有关的信息,生成跟随指令,该跟随行驶指示跟随车辆10的跟随行驶,包括行驶路线、行驶车速、加速度、减速度以及车辆10与作业车辆30的车间距离等。此外,在存在多个跟随车辆10行驶的作业车辆30的情况下,所述跟随指令可以还包括作业车辆30彼此之间的车间距离。例如,可以将车辆10作为前导车辆,小型拖拉机以及收获用农业机械等作业车
辆30例如按照该顺序跟随行驶。
67.在此,信息处理装置20的控制部21可以基于作业车辆30的大小选择从出发地(例如用户的田地)到目的地(例如用户自己家)的包括公路的车辆10的行驶路线。例如,信息处理装置20的控制部21基于预先存储于存储部23的作业车辆30的车长或车宽和从预先存储于存储部23的地图信息获取的道路的宽度,选择作业车辆30能够跟随行驶的车辆10的行驶路线。另外,信息处理装置20的控制部21经由通信部22将表示选择的行驶路线的信息发送至车辆10。另外,车辆10的控制部11与获取部14协作,实现车辆10在所述行驶路线上的自动行驶。此外,信息处理装置20的控制部21在选择行驶路线时,可以还考虑车辆10的车长或车宽。
68.步骤s102:信息处理装置20的控制部21经由通信部22向在步骤s100中检测出的作业车辆30发送在步骤s101中生成的跟随指令。
69.具体而言,信息处理装置20的控制部21经由通信部22例如作业车辆30从上述出发地到达上述目的地为止以规定的时间间隔,向在步骤s100中检测出的作业车辆30发送在步骤s101中生成的跟随指令。另外,作业车辆30的控制部31在每次经由通信部32从信息处理装置20接收到跟随指令时,基于所述跟随指令进行作业车辆30的转向控制、加速控制以及制动控制等,从而实现跟随车辆10的跟随行驶。
70.在此,信息处理装置20的控制部21可以进行向作业车辆30的周边通知作业车辆30正在跟随行驶的控制。具体而言,信息处理装置20的控制部21生成通知作业车辆30正在车辆10的后方跟随行驶的任意的消息。另外,信息处理装置20的控制部21经由通信部22向车辆10发送生成的消息。另外,车辆10的控制部11例如经由能够搭载于车辆10的扬声器等通过语音向作业车辆30的周边通知经由通信部12从信息处理装置20接收的消息。此外,在车辆10具备能够在作业车辆30的周围显示光学绳索(也称为“虚拟绳索”)的任意投光器的情况下,信息处理装置20的控制部21可以通过所述投光器在作业车辆30的周围显示虚拟绳索。由此,能够避免其它车辆加塞在车辆10和作业车辆30之间。
71.步骤s103:信息处理装置20的控制部21判断在作业车辆30的周边是否存在障碍物。在控制部21判断为存在障碍物的情况下,过程进入到步骤s104。另一方面,在控制部21未判断为存在障碍物的情况下,过程返回至步骤s102。
72.具体而言,作业车辆30的控制部31将由获取部34中包含的供农作业等的照相机等获取的作业车辆30的周边信息经由通信部32发送至信息处理装置20。此外,作业车辆30的周边信息可以为包括可能与作业车辆30冲撞的行进道路前方的行人或其它车辆等的障碍物的图像信息,但不限于此。另外,信息处理装置20的控制部21经由通信部22从作业车辆30获取作业车辆30的周边信息。另外,信息处理装置20的控制部21基于获取的作业车辆30的周边信息,使用任意的图像识别技术判断在作业车辆30的周边是否存在障碍物。
73.步骤s104:信息处理装置20的控制部21经由通信部22将使作业车辆30在原地停止的停止指令发送至作业车辆30。
74.具体而言,信息处理装置20的控制部21生成停止指令,该停止指令使作业车辆30在作业车辆30当前所处的场所停止。另外,信息处理装置20的控制部21经由通信部22将生成的停止指令发送至作业车辆30。另外,作业车辆30的控制部31基于经由通信部32从信息处理装置20接收的停止指令控制作业车辆30的制动踏板等,从而使作业车辆30停止。由此,
避免作业车辆30与障碍物冲撞。
75.步骤s105:信息处理装置20的控制部21在作业车辆30停止后经过规定时间之后,经由通信部22向作业车辆30再次发送指示跟随车辆10行驶的跟随指令。
76.具体而言,信息处理装置20的控制部21与步骤s101同样地,在作业车辆30停止后经过规定时间之后,生成指示跟随车辆10行驶的跟随指令。另外,信息处理装置20的控制部21经由通信部22向作业车辆30再次发送生成的跟随指令。
77.此外,当检测到作业车辆30到达目的地时,信息处理装置20的控制部21可以经由通信部22向作业车辆30发送停止指令,从而结束所述跟随行驶。
78.如上所述,本实施方式的信息处理装置20的控制部21生成跟随指令,该跟随指令指示跟随具有自动行驶功能的车辆10的跟随行驶。另外,信息处理装置20的控制部21经由通信部22向具有跟随行驶功能的作业车辆30发送生成的跟随指令。
79.根据本实施方式,通过使作业车辆30跟随具有自动驾驶功能的车辆10行驶,从而在公路等上无需人工操作作业车辆30,因此,能够削减人工费。另外,根据本实施方式,无需在作业车辆30搭载供在公路等上的自动行驶的传感器,因此,能够抑制作业车辆30的售价的上升。因此,能够改善使作业车辆30在公路上自动行驶的技术。
80.应注意,基于各附图以及实施例对本公开进行了说明,但本领域技术人员能够基于本公开进行各种变形以及改变。因此,应留意,这些变形以及改变包含于本公开的范围。例如,各构成部或各步骤等中包含的功能等能够以在逻辑上不矛盾的方式再配置,能够将多个构成部或步骤等组合为一个,或进行分割。
81.作为一个变形例,也可以采用将信息处理装置20的结构以及动作分散到能够相互通信的多个计算机的实施方式。另外,也可以采用将信息处理装置20的一部分或全部例如作为牵引装置搭载于车辆10或后述的无人飞行器50的实施方式。
82.另外,作为一个变形例,信息处理装置20的控制部21也可以当检测到表示作业车辆30跟随车辆10的跟随行驶的不稳定性的指标为规定的阈值以上时,将使作业车辆30在原地停止的停止指令或使作业车辆30退避行驶之后停止的停止指令经由通信部22发送至作业车辆30。具体而言,信息处理装置20的控制部21例如当检测到能够经由通信部22从作业车辆30获取的表示作业车辆30的打转或漂移等的程度的指标为规定的阈值以上时,生成使作业车辆30在原地停止的停止指令或使作业车辆30退避行驶之后停止的停止指令。另外,信息处理装置20的控制部21经由通信部22将生成的停止指令发送至作业车辆30。另外,信息处理装置20的控制部21在作业车辆30停止后经过规定时间之后,经由通信部22向作业车辆30再次发送指示跟随车辆10行驶的跟随指令。对于除此以外的部分,援用上述实施方式中的说明。此外,退避行驶可以包括使用任意的驾驶辅助技术将作业车辆30移动至规定的安全地带等。根据本变形例,即使在由于网络40的不稳定性等无法完成上述跟随指令的发送而作业车辆30的跟随行驶暂时不稳定的情况下,也能确保安全性。
83.另外,作为一个变形例,也可以代替具有自动驾驶功能的车辆10而由无人机等无人飞行器50引导作业车辆30。在本变形例中,信息处理装置20的控制部21生成跟随指令,该跟随指令指示跟随无人飞行器50的跟随行驶。另外,信息处理装置20的控制部21经由通信部22向具有跟随行驶功能的作业车辆30发送生成的跟随指令。关于信息处理装置20的具体动作,代替车辆10而由无人飞行器50引导作业车辆30,代替车辆10的行驶路线而选择无人
飞行器50的飞行路线,除此以外,援用与图5所示的流程图有关的说明。此外,如图6所示,本变形例的无人飞行器50具备控制部51、通信部52、存储部53、获取部54。控制部51进行无人飞行器50的飞行控制,除此以外,援用上述实施方式中的各单元的说明。根据本变形例,例如,当经由获取部54检测到其它车辆加塞到无人飞行器50和作业车辆30之间时,无人飞行器50的控制部51也能够进行自身移动到所述其它车辆的后方的飞行控制。另外,无人飞行器50的控制部51当根据经由通信部52获取的由作业车辆30具备的供农作业等的照相机等获取的图像检测到作业车辆30的周边的异常时,为了确认现场,也能够进行使无人飞行器50移动到作业车辆30的周边的飞行控制。
84.另外,作为一个变形例,也可以采用使通用计算机作为上述实施方式的信息处理装置20发挥功能的实施方式。具体而言,将描述实现上述实施方式的信息处理装置20的各功能的处理内容的程序存储至通用计算机的存储器,由处理器读取并执行所述程序。因此,本公开也能够实现为处理器能够执行的程序或存储所述程序的非临时性计算机可读介质。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。