技术特征:
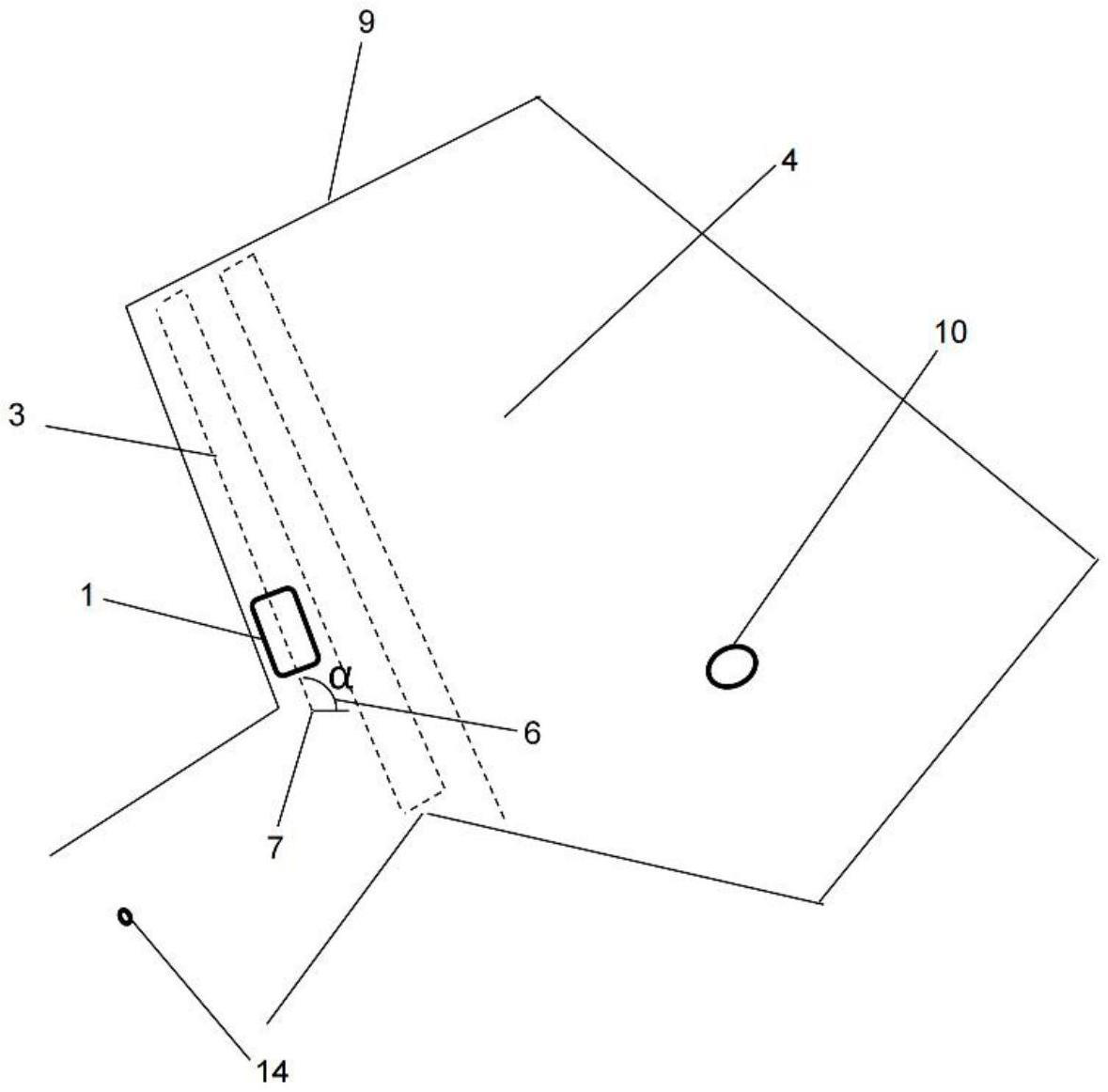
1.一种由机器人园林系统(15)执行的用于控制机器人园林工具(1)的方法,其中,所述系统包括所述机器人园林工具(1)、控制单元(13)和数据库(2),所述方法包括以下步骤:a:通过所述控制单元(13)从所述数据库(2)检索用于所述机器人园林工具(1)的预定路线(3),其中,所述预定路线(3)在工作区域(4)内,其中,所述预定路线(3)存储在所述数据库(2)中的路线数据集(5)中,其中,所述预定路线(3)基于行驶角度(6),其中,所述行驶角度(6)是从位于所述工作区域(4)内的所述机器人园林工具(1)的起点(7)延伸的角度,并且,其中,所述工作区域(4)界定了所述机器人园林工具(1)的行程,其中,所述路线数据集(5)包括多个预定路线(3a......n),并且,其中,每个预定路线(3)具有与所有其他预定路线的所有其他行驶角度基本不同的行驶角度(6),b:通过所述控制单元(13)控制所述机器人园林工具(1)从所述起点(7)开始,并沿着检索到的所述预定路线(3)移动。2.据权利要求1所述的控制机器人园林工具(1)的方法,其中,在所述方法之前,包括以下步骤:定义所述工作区域(4),以及在所述数据库(2)中存储定义所述工作区域(4)的多个地理数据点(8)。3.根据权利要求2所述的控制机器人园林工具(1)的方法,其中,所述方法还包括以下步骤:通过所述控制单元(13)控制所述机器人园林工具(1),在进行任何进一步活动之前遵循定义和存储的工作区域(4),以便用户可以确认所述存储的工作区域(4)是正确的。4.根据权利要求2所述的控制机器人园林工具(1)的方法,其中,定义所述工作区域包括:定义所述工作区域(4)的边界(9)。5.根据权利要求4所述的控制机器人园林工具(1)的方法,其中,定义所述边界的步骤包括:通过所述控制单元(13)控制所述机器人园林工具(1),以跟随所述工作区域(4)的边界(9)。6.根据权利要求2所述的控制机器人园林工具(1)的方法,其中,定义所述工作区域的步骤包括:定义所述工作区域(4)的障碍物(10)的边界(9)。7.根据权利要求1所述的控制机器人园林工具(1)的方法,其中,在所述预定路线的检索步骤中,根据所述机器人园林工具(1)在所述工作区域(4)内的匝数最小化的标准选择所述预定路线(3)。8.根据权利要求1所述的控制机器人园林工具(1)的方法,其中,所述行驶角度(6)在0到180
°
的范围内或在0到360
°
的范围内。9.根据权利要求1-2任意一项所述的控制机器人园林工具(1)的方法,其中,定位单元(11)与用于控制所述机器人园林工具遵循所检索的预定路线的所述控制单元(3)结合,和/或,所述定位单元(11)用于提供多个地理数据点(8),以便可以定义所述工作区域(4)。10.根据权利要求1所述的控制机器人园林工具的方法,其中,所述方法还包括:a:通过所述控制单元(13)检索信号(12),其中,所述信号(12)指示所述机器人园林工
具(1)应该移动到的预定位置(14),b:在所述数据库(2)中存储与所述机器人园林工具(1)的当前地理位置相对应的地理数据点(8),c:通过所述控制单元(13)控制所述机器人园林工具(1)移动到所述预定位置(14),d:通过所述控制单元(13)控制所述机器人园林工具(1)在所述预定位置(14)进行特定的活动,e:在所述预定位置(14)完成所述特定活动后,通过所述控制单元(13)控制所述机器人园林工具(1)返回到与存储的地理数据点相对应的地理位置,并且f:通过所述控制单元(13)控制所述机器人园林工具(1)继续沿着检索到的所述预定路线(3)移动。11.根据权利要求4所述的控制机器人园林工具的方法,其中,机器人园林工具(1)遵循检索到的预定路线(3)的控制步骤包括通过所述控制单元(13)控制所述机器人园林工具(1)来:a:沿所述行驶角度(5)直线移动,b:在到达所述工作区域(4)的边界(9)时转弯,c:沿与所述行驶角度(5)相反的直线方向移动,d:在到达所述工作区域(4)的边界(9)时转弯,e:沿所述行驶角度(5)直线移动,并且f:继续执行上述步骤,使得所述机器人园林工具(1)逐车道覆盖所述工作区域(4)。12.一种用于控制机器人园林工具(1)的机器人园林系统(15),其中,所述系统(15)包括所述机器人园林工具(1)、控制单元(13)和数据库(2),其中所述系统(15)被配置为:a:通过所述控制单元(13)从所述数据库(2)检索机器人园林工具(1)的预定路线(3),其中,所述预定路线(3)位于工作区域(4)内,其中,所述预定路线(3)存储在所述数据库(2)中的路线数据集(5)中,其中,所述预定路线(3)基于行驶角度(6),其中,所述行驶角度(6)是从位于所述工作区域(4)内的所述机器人园林工具(1)的起点(7)延伸的角度,其中,所述工作区域(4)限定了所述机器人园林工具(1)的行程,其中,所述路线数据集(5)包括多个预定路线(3a.......n),并且,其中,每个预定路线(3)具有与所有其他预定路线的所有其他行驶角度基本不同的行驶角度(6),b:通过所述控制单元(13)控制所述机器人园林工具(1)从所述起点(7)开始,并沿着检索的所述预定路线(3)移动。13.一种计算机程序,包括计算机可读代码装置,当在根据权利要求12所述的控制单元上运行时,使系统(15)根据权利要求1-11中的任一项执行相应的方法。14.一种计算机程序产品,包括计算机可读介质和根据权利要求13所述的计算机程序,其中所述计算机程序存储在所述计算机可读介质上。
技术总结
一种由机器人园林系统执行的用于控制机器人园林工具的方法(1)。所述系统包括机器人园林工具(1)、控制单元和数据库。所述方法包括以下步骤:A:检索工作区域(4)的预定路线(3)。所述预定路线(3)基于行驶角度(6)。所述行驶角度(6)是从起点(7)延伸的角度。所述工作区域(4)界定了所述机器人园林工具(1)的行程。路线数据集包括多个预定路线。每个预定路线具有与所有其他预定路线的所有其他行驶角度基本不同的行驶角度。B:控制所述机器人园林工具(1)从所述起点(7)开始,沿着检索到的所述预定路线(3)移动。线(3)移动。线(3)移动。
技术研发人员:卡尔
受保护的技术使用者:格力博(江苏)股份有限公司
技术研发日:2021.12.27
技术公布日:2023/8/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。