1.本发明属于煤矿巷道行走平台技术领域,涉及一种电驱胶轮式行走平台。
背景技术:
2.煤矿巷道是煤矿井下通风、运输、排水等的重要通道,巷道内的积尘不仅影响井下作业人员的健康和安全,而且容易引发粉尘爆炸等事故。目前,煤矿巷道内积尘的清洗主要依靠人工或者机械方式进行,这些方式存在效率低、成本高、效果差等缺点。为了解决这些问题,已有多种类型的积尘自动清洗设备被开发出来,例如喷雾降尘设备、除尘设备、冲尘机器人等。这些设备各有优缺点,但通常都需要搭载在相应的行走平台上,以实现在巷道内的自动行走和清洗。然而,现有的行走平台往往不能满足积尘自动清洗设备的需求,例如行走速度较慢,不能适应快速清洗的要求;行走稳定性较差,容易受到巷道内地形和环境因素的影响;行走噪音较大,不利于隐蔽和安全等。
3.为了解决上述问题,本发明提供了一种电驱胶轮式行走平台,该行走平台能够在复杂地形和环境下快速稳定地行走,并具有防爆功能。该行走平台可以搭载煤矿航道内积尘自动清洗设备,实现自动行走进行清洁。
技术实现要素:
4.有鉴于此,本发明的目的在于解决巷道内自动清洗设备的移动运载问题,提供一种电驱胶轮式行走平台。
5.为达到上述目的,本发明提供如下技术方案:
6.一种电驱胶轮式行走平台,包括动力总成系统、电气系统;
7.所述动力总成系统包括制动系统、矿用防爆电动转向系统、传动驱动系统和底盘总成;
8.所述制动系统包括行车制动和驻车制动两套各自独立的系统,
9.所述行车制动用于保障平台正常移动过程的制动;
10.所述驻车制动为失效安全型,保证行走平台发生故障或电机停止工作时仍具备足够的制动能力;
11.所述矿用防爆电动转向系统控制电机以转角伺服的模式代替驾驶员控制整车的方向,通过can通讯执行控制器发送的转向和助力指令,实现车辆转向系统的智能化;
12.所述传动驱动系统包括传动系统、线控驱动系统,用于驱动行走平台移动;
13.所述电气系统包括防爆电池箱、变频器、控制台、传感器、自动保护装置、通讯系统、显示仪表;所述控制台内集成整车vcu和各个域控制器,对动力总成系统和电气系统进行控制。
14.进一步,所述行车制动包括液压制动和电回馈制动;所述液压制动系统包括湿式制动器、制动阀、蓄能器、液压胶管;
15.所述湿式制动器安装在底盘总成的车轮上,通过脚踏式液压阀控制其制动力;
16.所述蓄能器用于保证平台在电机停止工作的状态下仍具备一定的制动能力,保证行车安全;
17.所述电回馈制动用于避免液压制动器过热,同时为电池充电。
18.进一步,所述制动系统通过can与域控制器通讯,执行域控制器发送的减速指令、制动指令。
19.进一步,所述制动系统控制制动压力范围在:0~100%,制动精度0.5%;制动响应时延:<200ms;制动释放时间:<200ms。
20.进一步,所述矿用防爆电动转向系统包括驱动转向桥、转向器、方向盘;电机带动转向器提供动力;控制转向速率在:50~540度/s;转向精度:方向盘精度误差在
±1°
以内;角度及控制信号传输速率:≤100ms。
21.进一步,所述传动系统包括隔爆型变频牵引电机、减速箱、传动轴、驱动转向桥,所述隔爆型变频牵引电机通过减速箱带动所述驱动转向桥;
22.所述线控驱动系统包括整车vcu、线控踏板、电机控制器、驱动电机;自动驾驶模式下,自动控制移动平台的前进、后退以及车速。
23.进一步,所述线控驱动系统通过can与控制器通讯,执行车载域控制器发送的加速装置指令,实现车辆加速功能,加速度范围为:0~0.3g,加速装置控制精度0.05g;最大加速装置响应时延:《100ms;加速装置释放时间:《100ms。
24.进一步,所述底盘总成包括支架以及至少四个防爆车轮;所述防爆车轮与支架之间采用弹性连接方式,并设置减震装置和稳定杆,以保证的悬挂性能和稳定性。
25.进一步,所述防爆车轮采用无内胎结构,并配备防爆装置和自封性材料,在遇到尖锐物体刺穿时,通过自封性材料自我修复。
26.进一步,还包括自动导航系统,所述自动导航系统包括设于动力总成系统上的惯性导航系统、激光雷达、视觉传感器,实现行走平台的移动导航。
27.本发明的有益效果在于:
28.1、本发明采用自动化设计,利用电驱动方式,并采用矿用防爆电动转向系统,实现了车辆转向系统的智能化,提高了转向灵活性和精度,降低了操作难度。
29.2、本发明采用行车制动和驻车制动两套各自独立的系统,保证了行走平台在正常移动和故障停止时都具备足够的制动能力,提高了行车安全性。
30.3、本发明采用电回馈制动,避免了液压制动器过热,同时为电池充电,提高了能源利用率。
31.4、本发明采用防爆车轮,并配备防爆装置和自封性材料,在遇到尖锐物体刺穿时,通过自封性材料自我修复,提高了车轮的耐久性和可靠性。
32.5、本发明还配备自动导航系统,通过惯性导航系统、激光雷达、视觉传感器等设备,实现了行走平台的移动导航,提高了工作效率和准确性。
33.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
34.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
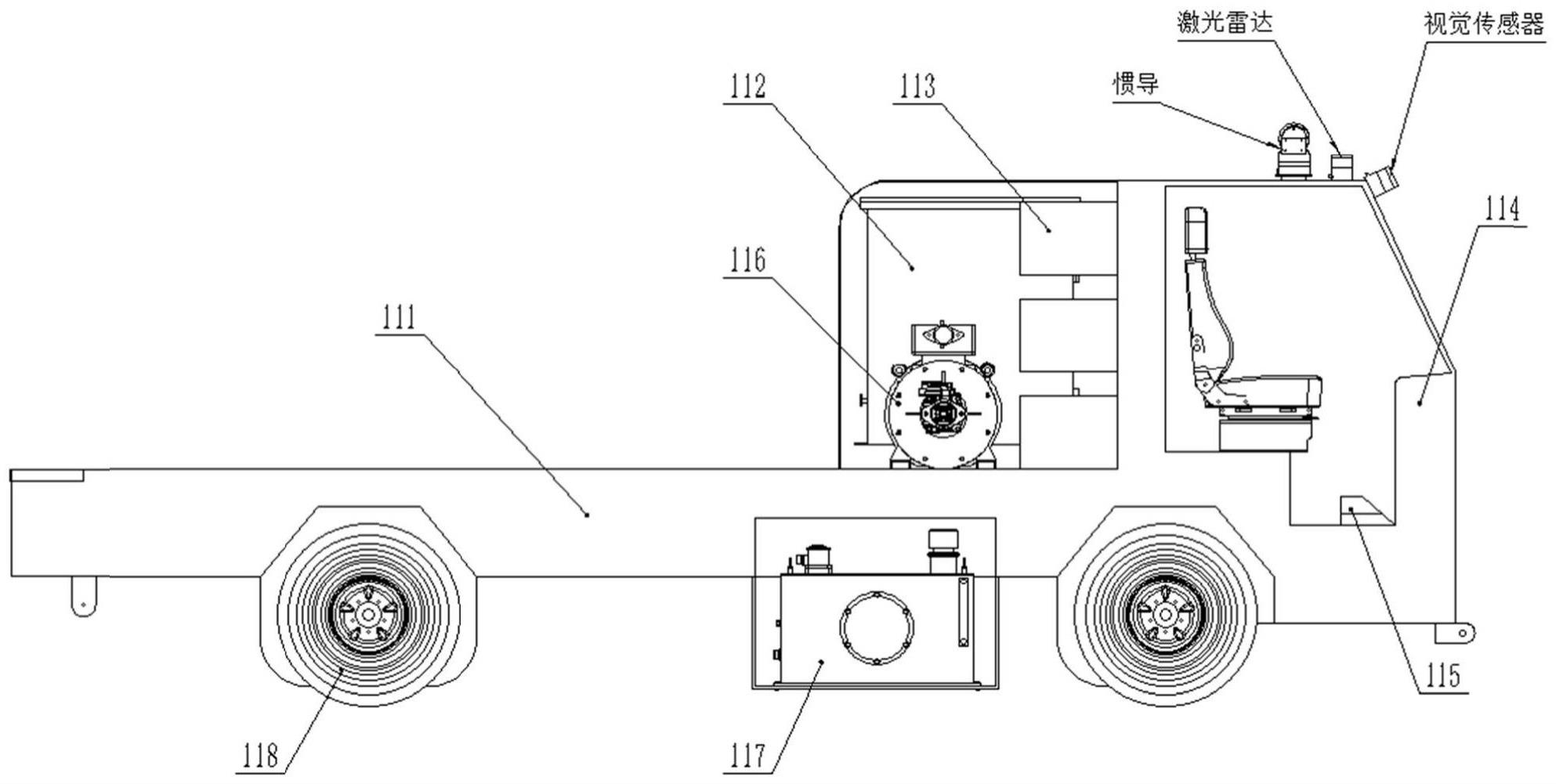
35.图1为本发明中电驱胶轮式行走平台整体示意图;
36.图2为本发明的系统原理示意图。
37.附图标记:111-动力总成系统;112-电气系统;113-防爆电池箱;114-控制台;115-线控踏板;116-电机;117-矿用防爆电动转向系统;118-防爆车轮。
具体实施方式
38.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
39.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
40.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
41.请参阅图1~2,为一种电驱胶轮式行走平台,包括动力总成系统111、电气系统112、自动导航系统;动力总成系统111包括制动系统、矿用防爆电动转向系统117、传动驱动系统和底盘总成;制动系统包括行车制动和驻车制动两套各自独立的系统,行车制动用于保障平台正常移动过程的制动;驻车制动为失效安全型,保证行走平台发生故障或电机116停止工作时仍具备足够的制动能力;矿用防爆电动转向系统117控制电机116以转角伺服的模式代替驾驶员控制整车的方向,通过can通讯执行控制器发送的转向和助力指令,实现车辆转向系统的智能化;传动驱动系统包括传动系统、线控驱动系统,用于驱动行走平台移动;电气系统112包括防爆电池箱113、变频器、控制台114、传感器、自动保护装置、通讯系统、显示仪表;控制台114内集成整车vcu和各个域控制器,对动力总成系统111和电气系统112进行控制。行车制动包括液压制动和电回馈制动;液压制动系统包括湿式制动器、制动阀、蓄能器、液压胶管;自动导航系统包括安装在动力总成系统111上的惯性导航系统、激光雷达、视觉传感器,实现行走平台的移动导航。
42.湿式制动器安装在底盘总成的车轮上,通过脚踏式液压阀控制其制动力;蓄能器用于保证平台在电机116停止工作的状态下仍具备一定的制动能力,保证行车安全;电回馈
制动用于避免液压制动器过热,同时为电池充电。制动系统通过can与域控制器通讯,执行域控制器发送的减速指令、制动指令。
43.制动系统控制制动压力范围在:0~100%,制动精度0.5%;制动响应时延:<200ms;制动释放时间:<200ms。矿用防爆电动转向系统117包括驱动转向桥、转向器、方向盘;电机116带动转向器提供动力;控制转向速率在:50~540度/s;转向精度:方向盘精度误差在
±1°
以内;角度及控制信号传输速率:≤100ms。
44.传动系统包括隔爆型变频牵引电机、减速箱、传动轴、驱动转向桥,隔爆型变频牵引电机通过减速箱带动驱动转向桥;线控驱动系统包括整车vcu、线控踏板115、电机控制器、驱动电机;自动驾驶模式下,自动控制移动平台的前进、后退以及车速。
45.线控驱动系统通过can与控制器通讯,执行车载域控制器发送的加速装置指令,实现车辆加速功能,加速度范围为:0~0.3g,加速装置控制精度0.05g;最大加速装置响应时延:《100ms;加速装置释放时间:《100ms。
46.底盘总成包括支架以及至少四个防爆车轮118;防爆车轮118与支架之间采用弹性连接方式,并设置减震装置和稳定杆,以保证的悬挂性能和稳定性。防爆车轮118采用无内胎结构,并配备防爆装置和自封性材料,在遇到尖锐物体刺穿时,通过自封性材料自我修复。
47.当需要移动行走平台时,操作员可以通过方向盘或者自动导航系统控制行走平台的行进方向和路线。当操作员踩下线控踏板115时,整车vcu接收到信号,并通过通讯系统发送给电机控制器和变频器。电机控制器根据信号调节隔爆型变频牵引电机的转速和扭矩,并通过传动系统带动驱动转向桥和防爆车轮118旋转。变频器根据信号调节矿用防爆电动转向系统117的转速和角度,并通过激光雷达和视觉传感器检测周围环境和障碍物,实现行走平台的智能化转向。同时,显示仪表显示行走平台的各项参数和状态。
48.当需要停止行走平台时,操作员可以松开线控踏板115或者按下停止按钮。此时,整车vcu接收到信号,并通过通讯系统发送给电机控制器和变频器。电机116控制器根据信号启动电回馈制动,并将多余的能量回馈给防爆电池箱113。变频器根据信号启动液压制动,并通过制动阀控制湿式制动器的制动力,使行走平台减速或者停止。同时,自动保护装置检测行走平台的各项安全指标,如温度、压力、电压等,如有异常,及时报警或者断开电源。当行走平台停止后,驻车制动自动启动,保证行走平台的稳定性。
49.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。