1.本技术涉及电池制造设备领域,特别是涉及一种铆钉安装机构以及电池制造设备。
背景技术:
2.电池广泛用于各种电子设备,例如手机、笔记本电脑、电瓶车、电动汽车、电动飞机、电动轮船和电动工具等,电池可以包括镉镍电池、氢镍电池、锂离子电池和二次碱性锌锰电池等。
3.目前,除了电池的安全性能,如何提高电池的安装效率也是本领域的研究重点之一。
技术实现要素:
4.鉴于上述问题,本技术提供一种铆钉安装机构以及电池制造设备,能够提高电池安装效率。
5.第一方面,本技术提供了一种铆钉安装机构,包括基座、多个安装模块以及位置调节装置。多个安装模块设置于基座并用于将铆钉安装至待安装位。安装模块包括安装支架以及吸附组件,安装支架连接于基座,吸附组件连接于安装支架并用于吸附铆钉。位置调节装置设置于基座并用于带动至少一个安装模块相对基座移动。
6.本技术实施例的技术方案中,每个安装模块可将一个铆钉安装至待安装位,通过在基座上设置多个安装模块,能够实现同时在多个铆钉安装位上安装铆钉,提高安装效率。并且,设置位置调节装置能够调节至少一个安装模块的位置,能将多个安装模块的位置进行变换,适应不同的铆钉安装位的安装,提高铆钉安装机构的兼容性,进一步提高铆钉安装效率。通过设置安装支架,能够将吸附组件与基座进行牢固连接,同时便于吸附组件对铆钉进行吸附。每个吸附组件能够吸附或安装至少一个铆钉。上述的结构能保证吸附组件安装的稳定性以及吸附的效率。
7.在一些实施例中,位置调节装置包括移动板以及驱动组件。移动板沿第一方向可移动地连接于基座,至少一个安装模块设于移动板。驱动组件设于基座,驱动组件与移动板连接以驱动移动板相对基座沿第一方向移动。在上述的结构中,通过设置移动板实现安装模块与基座之间的滑动连接,便于安装模块的位置调节,驱动组件能够实现对安装模块位置的自动化调节,并且能提高位置调节的效率,实现对不同安装组件的快速匹配。
8.在一些实施例中,位置调节装置设置为多个,移动板的数量也设置为多个,且位置调节装置与移动板一一对应设置。通过设置多个位置调节装置,能够同时调节多个安装模块的位置,实现更多种类的位置变换模式,进一步增大铆钉安装机构的使用范围,
9.在一些实施例中,至少两个安装模块设置于移动板。通过将多个安装模块设于移动板,能够通过将多个安装模块的位置进行调节,提高安装模块位置调节的速度,提高安装效率。
10.在一些实施例中,铆钉安装机构还包括导向件,导向件固定于基座,移动板通过导向件可移动地连接于基座。导向件能够限制移动板移动的方向,提高位置调节机构的调节效率。
11.在一些实施例中,安装模块还包括伸缩组件,伸缩组件与安装支架连接,吸附组件设于伸缩组件的活动端,伸缩组件能够沿第二方向伸缩。第二方向与第一方向相交。上述的结构中,通过设置伸缩组件能够将吸附组件沿第二方向伸缩以提高吸附组件吸取或安装铆钉的效率,提高铆钉安装机构的自动化程度。
12.在一些实施例中,安装支架包括支架本体以及安装板。支架本体,连接于基座。安装板,与支架本体滑动连接,吸附组件设于安装板,驱动组件与安装板连接。上述的技术方案,吸附组件设于安装板,安装板与支架本体滑动连接,能够实现吸附组件与支架本体的滑动连接,便于吸附组件移动以吸取或安装铆钉。驱动组件通过安装板带动吸附组件移动,提高吸附组件吸取或安装铆钉的效率。
13.在一些实施例中,吸附组件包括吸附杆以及吸附头。吸附杆一端连接于安装板。吸附头形状与铆钉匹配,吸附头与吸附杆远离安装板的一端可拆卸连接。
14.通过上述的技术方案,通过设置吸附杆以及吸附头,能够实现对铆钉的连接。并且,吸附头与吸附杆可拆卸连接,能够便于更换不同的吸附头以匹配不同规格的铆钉,提高吸附组件的兼容性。
15.在一些实施例中,吸附组件还包括负压机构,吸附杆的一端穿过安装板与负压机构连接,吸附杆以及吸附头内设有贯通的吸附腔,吸附腔用于与负压机构连通。上述的结构中,通过连接负压机构,提高了吸附头对铆钉的吸附速度,并且提升了铆钉与吸附组件之间连接的强度。
16.在一些实施例中,吸附组件还包括滑套、滑套法兰、压板以及第一弹簧。滑套套设于吸附头并与吸附杆远离安装板的端部滑动连接,滑套的端部设有吸附孔,吸附头能够从吸附孔中伸出。滑套法兰沿滑套的径向向外延伸形成。压板套设于吸附杆且与吸附杆固定连接,压板设于滑套法兰与安装板之间。第一弹簧两端分别与压板与滑套法兰抵接。
17.在上述的技术方案中,通过设置滑套能够相对吸附头滑动,在吸附铆钉之后对铆钉进行包围,提高铆钉与吸附头连接的稳定性。并且通过设置滑套法兰以及压板,便于第一弹簧的安装。第一弹簧抵接于压板以及滑套法兰之间,以对滑套和安装板之间施加推动力,实现对吸附头的自动滑动,包围吸附头上吸附的铆钉的至少部分,提高铆钉与吸附头连接的稳定性。
18.在一些实施例中,吸附杆的端部贯穿安装板并与安装板滑动连接。吸附组件还包括第二弹簧,第二弹簧设于安装板以及压板之间。通过设置第二弹簧,在吸附杆安装铆钉时,能对铆钉的压力进行缓冲,防止压力过大造成损坏。
19.在一些实施例中,吸附组件还包括感应元件,感应元件设于安装板。通过设置感应元件,能够对吸附头吸附的铆钉规格进行识别感应,实现自动识别铆钉,提高铆钉规格的准确性。
20.第二方面,本技术提供了一种电池制造设备,其包括上述实施例中的铆钉安装机构。
21.在一些实施例中,电池制造设备还包括移动机构以及控制机构。移动机构与铆钉
安装机构的安装板连接,移动机构用于移动铆钉安装机构。控制机构与铆钉安装机构的驱动组件连接,控制机构用于控制铆钉安装机构中的安装模块的移动。
22.上述的技术方案中,移动机构能够带动铆钉安装机构移动至目标安装位置,提高安装的效率,控制机构能够对铆钉安装机构的位置调节装置进行调节,实现自动调整安装模块的位置,提高安装机构的调节速度。
23.上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
附图说明
24.下面将参考附图来描述本技术示例性实施例的特征、优点和技术效果。
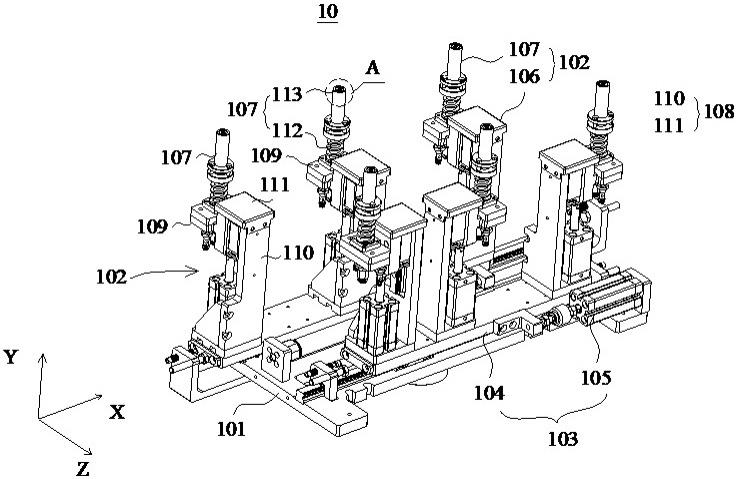
25.图1为本技术一实施例的铆钉安装机构的结构示意图;
26.图2为图1中吸附头的放大结构示意图;
27.图3为本技术一实施例的安装模块的结构示意图;
28.图4为本技术一实施例的滑套的结构示意图;
29.图5为本技术一实施例的铆钉安装方法的流程框图。
30.附图标记详细说明
31.10、铆钉安装机构;x、第一方向;y、第二方向;z、第三方向;101、基座;102、安装模块;103、位置调节装置;104、移动板;105、驱动组件;106、安装支架;107、吸附组件;108、支架本体;109、安装板;110、侧板;111、顶板;112、吸附杆;113、吸附头;114、滑套;115、滑套法兰;116、压板;117、第一弹簧;118、吸附孔;119、第二弹簧;120、感应元件;121、伸缩组件。
具体实施方式
32.下面将结合附图对本技术技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本技术的技术方案,因此只作为示例,而不能以此来限制本技术的保护范围。
33.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同;本文中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术;本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。
34.在本技术实施例的描述中,技术术语“第一”“第二”等仅用于区别不同对象,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量、特定顺序或主次关系。在本技术实施例的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
35.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
36.在本技术实施例的描述中,术语“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三
种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
37.在本技术实施例的描述中,术语“多个”指的是两个以上(包括两个),同理,“多组”指的是两组以上(包括两组),“多片”指的是两片以上(包括两片)。
38.在本技术实施例的描述中,技术术语“中心”“纵向”“横向”“长度”“宽度”“厚度”“上”“下”“前”“后”“左”“右”“竖直”“水平”“顶”“底”“内”“外”“顺时针”“逆时针”“轴向”“径向”“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术实施例的限制。
39.在本技术实施例的描述中,除非另有明确的规定和限定,技术术语“安装”“相连”“连接”“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;也可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术实施例中的具体含义。
40.随着电动汽车技术的发展和普及,人们对电动汽车中的动力电池的生产效率提出了更高的要求。电池通常包括多个电池模组,电池模组包括多个电池单体。电池单体是能够实现充放电功能的最小单元。多个电池单体串联、并联或混联形成电池模组。电池模组包括汇流板以及电池单体,多个电池单体分别与汇流板连接,汇流板与电池单体之间通过铆钉实现连接固定。
41.电池模组中,需要安装的铆钉数量多,人工安装劳动量大,因此铆钉安装工序的生产效率低。并且,手动安装铆钉的无法保持按压力度的一致,导致汇流板与电池单体各处连接的强度不均衡,电池模组的结构稳定性降低。
42.基于上述的考虑,为了提高电池模组安装效率以及结构稳定性,本技术实施例提供一种铆钉安装机构。铆钉安装机构中,每个安装模块可将一个铆钉安装至待安装位,通过在基座上设置多个安装模块,能够实现同时在多个铆钉安装位上安装铆钉,提高安装效率。并且,设置位置调节装置能够调节至少一个安装模块的位置,能将多个安装模块的相对位置进行变换,适应不同的铆钉安装位的安装,提高铆钉安装机构的兼容性,进一步提高铆钉安装效率。
43.本技术实施例公开的铆钉安装机构,可以但不限用于电池模组的铆钉安装,同样可以用于各种需要安装铆钉的组件和设备。通过使用本技术提供的铆钉安装机构,能够有效提高铆钉安装的效率以及适应不同种类的组件和设备的铆钉安装。
44.以下实施例为了方便说明,以本技术一实施例的一种电池模组的铆钉安装机构为例进行说明。
45.请参照图1至图4,图1为本技术一实施例的铆钉安装机构10的结构示意图;图2为图1中吸附头113的放大结构示意图;图3为本技术一实施例的安装模块102的结构示意图;图4为本技术一实施例的滑套114的结构示意图。
46.如图所示,本技术的实施例提供了一种铆钉安装机构10,包括:基座101、多个安装模块102以及位置调节装置103。多个安装模块102设置于基座101并用于将铆钉安装至待安装位。位置调节装置103设置于基座101并用于带动至少一个安装模块102相对基座101移动。
47.基座101可以是具有稳定安装平面的结构,基座101能够放置于安装平台上,为安装模块102提供稳定的安装面。安装模块102为能够独立安装铆钉的结构,安装模块102能够吸附一个铆钉,并且能够将铆钉安装至待安装位置。位置调节装置103能够相对于基座101移动,并且能够在移动到目标位置后,相对基座101固定,保证安装模块102安装时的稳定性。
48.本技术实施例的技术方案中,每个安装模块102可将一个铆钉安装至待安装位,通过在基座101上设置多个安装模块102,能够实现同时在多个铆钉安装位上安装铆钉,提高安装效率。位置调节装置103能够调节至少一个安装模块102的位置,能将多个安装模块102的位置进行变换,适应不同的铆钉安装位的安装,提高铆钉安装机构10的兼容性。
49.在本技术的一些实施例中,位置调节装置103包括移动板104以及驱动组件105。移动板104沿第一方向x可移动地连接于基座101,至少一个安装模块102设于移动板104。驱动组件105设于基座101,驱动组件105与移动板104连接以驱动移动板104相对基座101沿第一方向x移动。
50.移动板104可以是具有稳定安装面的板状结构,移动板104相对基座101设置,移动板104的安装面与基座101的安装平面大致平行,以保证安装模块102移动过程的稳定性。驱动组件105包括驱动电机以及伸缩杆,伸缩杆与移动板104连接,驱动电机设于基座101上,驱动电机能够驱动伸缩杆沿第一方向x伸缩移动,以带动移动板104沿第一方向x来回移动。示例性的,驱动组件105可以选择气缸,易于安装,并且成本低廉。
51.在上述的结构中,通过设置移动板104实现安装模块102与基座101之间的滑动连接,便于安装模块102的位置调节,驱动组件105能够实现对安装模块102位置的自动化调节,并且能提高位置调节的效率,实现对不同安装组件的快速匹配。
52.示例性的,螺钉安装机构上的安装模块102数量大于待安装螺钉数量时,驱动组件105推动移动板104,将一个安装模块102推动至远离其他安装模块102的位置,被推动的安装模块102可以设置于超出待安装位置区域,当整个铆钉安装机构10朝向待安装面进行安装时,被推动的安装模块102可以不参与铆钉安装,从而实现将安装模块102与待安装面上的铆钉安装位进行匹配。
53.在本技术的一些实施例中,位置调节装置103设置为多个,移动板104的数量也设置为多个,且位置调节装置103与移动板104一一对应设置。
54.示例性的,移动板104的数量为三个,安装模块102的数量为四个,其中一个安装模块102直接设置于基座101上,三个安装模块102分别设于三个移动板104,三个移动板104分别通过三个驱动组件105驱动,因此四个安装模块102的相对位置均可以进行调节,实现对多种不同铆钉安装位置的适应。
55.通过设置多个位置调节装置103,能够同时调节多个安装模块102的位置,实现更多种类的位置变换模式,进一步增大铆钉安装机构10的使用范围。
56.在本技术的一些实施例中,至少两个安装模块102设置于移动板104。通过将多个安装模块102设于移动板104,能够通过将多个安装模块102的位置进行调节,提高安装模块102位置调节的速度,提高安装效率。
57.示例性的,铆钉安装机构10包括两个安装模组,每个安装模组包括:三个安装模块102、一块移动板104以及一个驱动组件105。两个安装模组沿第三方向z依次设置。每个安装
模组中,三个安装模块102沿第一方向x依次设置。多个安装模块102相对于基座101沿第二方向y伸缩移动。其中,第一方向x与第二方向y相交,第三方向z与第一方向x以及第二方向y所在的平面相交。
58.在上述的结构中,六个安装模块102能够同时沿第二方向y伸缩移动,以安装六个铆钉,因此可以根据待安装面上的铆钉位置调节两个安装模组的相对位置,实现铆钉的快速安装。
59.在本技术的一些实施例中,铆钉安装机构10还包括导向件,导向件固定于基座101,移动板104通过导向件沿第一方向x可移动地连接于基座101。导向件能够限制移动板104移动的方向,提高位置调节机构的调节效率。
60.示例性的,导向件可以包括设于基座101上的滑槽以及设于移动板104上的滑块,滑块与滑槽相互配合带动移动板104沿基座101移动。滑槽沿第一方向x设置,以对移动板104的移动方向形成导向,保证安装模块102位置调节的准确性。
61.在本技术的一些实施例中,安装模块102包括安装支架106以及吸附组件107。安装支架106连接于基座101。吸附组件107连接于安装支架106并用于吸附铆钉。
62.吸附组件107能够吸附至少一个铆钉,并将铆钉按压至待安装位置。安装支架106沿基座101的表面凸出,以便于吸附组件107对铆钉的吸附以及安装。安装支架106与基座101之间可拆卸连接,便于吸附组件107的安装和检修。安装支架106可以直接安装于基座101,或者安装支架106可以安装于移动板104以实现与基座101之间的间接连接。
63.通过设置安装支架106,能够将吸附组件107与基座101进行牢固连接,同时便于吸附组件107对铆钉进行吸附。每个吸附组件107能够吸附或安装至少一个铆钉。上述的结构能保证吸附组件107安装的稳定性以及吸附的效率。
64.在本技术的一些实施例中,安装模块102还包括伸缩组件121,伸缩组件121与安装支架106连接,吸附组件107设于伸缩组件121的活动端,伸缩组件121能够沿第二方向y伸缩。第二方向y与第一方向x相交。
65.示例性的,伸缩组件121包括气缸,结构简单,成本较低。吸附组件107连接于气缸的活塞杆。活塞杆的轴向沿着第二方向y设置。第二方向y可以垂直于第一方向x。伸缩组件121沿垂直于基座101的安装平面伸缩。上述的结构能保证多个安装模块102对应同一个待安装面,提高安装的效率,保证多个铆钉安装的按压力度一致,提高电池的整体结构稳定性以及铆钉安装机构10的自动化程度。
66.在本技术的一些实施例中,安装支架106包括支架本体108以及安装板109。支架本体108连接于基座101。安装板109与支架本体108滑动连接,吸附组件107设于安装板109,驱动组件105与安装板109连接。
67.示例性的,支架本体108包括多个侧板110以及顶板111,多个侧板110垂直于移动板104设置,并且多个侧板110依次连接并围合形成安装空间,顶板111连接于多个侧板110且与移动板104相对设置。安装板109与多个侧板110连接并相对滑动,安装板109能够为吸附组件107提供稳定的安装面。
68.上述的技术方案,吸附组件107设于安装板109,安装板109与支架本体108滑动连接,能够实现吸附组件107与支架本体108的滑动连接,便于吸附组件107移动以吸取或安装铆钉。驱动组件105通过安装板109带动吸附组件107移动,提高吸附组件107吸取或安装铆
钉的效率。
69.请结合参考图1以及图2,在本技术的一些实施例中,吸附组件107包括吸附杆112以及吸附头113。吸附杆112一端连接于安装板109,另一端与吸附头113连接。吸附头113形状与铆钉匹配,能便于快速吸附铆钉,并且提高与铆钉连接的强度。可选地,吸附头113与吸附杆112可拆卸连接。
70.通过上述的技术方案,通过设置吸附杆112以及吸附头113,能够实现对铆钉的连接。并且,吸附头113与吸附杆112可拆卸连接,能够便于更换不同的吸附头113以匹配不同规格的铆钉,提高吸附组件107的兼容性。
71.在本技术的一些实施例中,吸附组件107还包括负压机构,吸附杆112的一端穿过安装板109与负压机构连接,吸附杆112以及吸附头113内设有贯通的吸附腔,吸附腔用于与负压机构连通。上述的结构中,通过连接负压机构,提高了吸附头113对铆钉的吸附速度,提升了铆钉与吸附组件107之间连接的强度。
72.如图3以及图4所示,在本技术的一些实施例中,吸附组件107还包括滑套114、滑套法兰115、压板116以及第一弹簧117。滑套114套设于吸附头113并与吸附杆112远离安装板109的端部滑动连接,滑套114的端部设有吸附孔118,吸附头113能够从吸附孔118中伸出。滑套法兰115沿滑套114的径向向外延伸形成。压板116套设于吸附杆112且与吸附杆112固定连接,压板116设于滑套法兰115与安装板109之间。第一弹簧117两端分别与压板116与滑套法兰115抵接。
73.示例性的,当使用吸附组件107吸附铆钉时,滑套114受到第一弹簧117的推动力沿第二方向y伸出并套设在吸附头113外。吸附时,将吸附组件107对准铆钉,铆钉的一端伸入吸附孔118中并与吸附头113连接,在滑套114的作用下,铆钉无法轻易与吸附头113脱离,并且能沿着吸附孔118的轴向移动,限制铆钉的移动路径,防止铆钉发生歪斜。安装铆钉时,将吸附头113吸附的铆钉对准安装部位,滑套114与待安装面抵接,吸附杆112带动吸附头113向下压,滑套114相对吸附杆112移动,铆钉从吸附孔118中被推出,按压至待安装位。
74.在上述的技术方案中,通过设置滑套114能够相对吸附头113滑动,在吸附铆钉之后对铆钉进行包围,提高铆钉与吸附头113连接的稳定性。并且通过设置滑套法兰115以及压板116,便于第一弹簧117的安装。第一弹簧117抵接于压板116以及滑套法兰115之间,以对滑套114和安装板109之间施加推动力,实现对吸附头113的自动滑动,包围吸附头113上吸附的铆钉的至少部分,提高铆钉与吸附头113连接的稳定性。
75.在本技术的一些实施例中,吸附杆112的端部贯穿安装板109并与安装板109滑动连接。吸附组件107还包括第二弹簧119,第二弹簧119设于安装板109以及压板116之间。
76.示例性的,当多个安装模块102的吸附头113沿第二方向y的长度不一致时,当对基座101同时施加压力下压会导致待安装面的受力过大,对待安装组件造成损坏。第二弹簧119的设置,对上述安装面受到的过大的压力进行缓冲,防止对待安装组件造成损坏。通过设置第二弹簧119,在吸附杆112安装铆钉时,防止压力过大造成待安装组件的损坏。
77.在本技术的一些实施例中,吸附组件107还包括感应元件120,感应元件120设于安装板109。可选的,感应元件120设于安装板109朝向吸附头113的一侧,感应元件120能够感应吸附头113附近的金属物体。示例性的,可以根据需要安装的铆钉的形状设置感应元件120的感应范围,当吸附头113上吸附的铆钉出现在了感应范围,说明吸附的铆钉与预设需
要的铆钉形状不一致,感应元件120可以发送信号提示,及时进行更换。
78.可选地,感应元件120设于安装板109背离吸附头113的一侧,安装板109设可以设置贯穿的观察孔,感应元件120通过观察孔对吸附头113上的铆钉进行感应。同样的,可以根据需要安装的铆钉的形状设置感应元件120的感应范围,当吸附头113上吸附的铆钉出现在了感应范围,说明吸附的铆钉与预设需要的铆钉形状不一致,感应元件120可以发送信号提示,及时进行更换。
79.通过设置感应元件120,能够对吸附头113吸附的铆钉规格或者形状进行识别感应,实现自动识别铆钉,提高铆钉吸附和安装的准确性。
80.本技术的实施例还提供了一种电池制造设备,其包括以上任一实施例中的铆钉安装机构10。
81.在本技术的一些实施例中,电池制造设备还包括移动机构以及控制机构。移动机构与铆钉安装机构10的安装板109连接,移动机构用于将铆钉安装机构10移动至安装区域。控制机构与铆钉安装机构10的驱动组件105连接,控制机构用于控制铆钉安装机构10中的安装模块102的移动。
82.移动机构包括机器人抓手,机器人抓手可以与铆钉安装机构10的基座101连接,机器人抓手移动并带动多个安装模块102移动。
83.上述的技术方案中,移动机构能够带动铆钉安装机构10移动至目标安装位置,提高安装的效率,控制机构能够对铆钉安装机构10的位置调节装置103进行调节,实现自动调整安装模块102的位置,提高安装机构的调节速度。
84.可选地,控制机构还与伸缩组件121连接,控制伸缩组件121的运行,带动吸附组件107沿第二方向y移动。
85.在本技术的一些实施例中,电池制造设备还包括纠偏模块,纠偏模块可以设于基座101。纠偏模块可以包括光学摄像机,例如ccd相机等。光学摄像机能够将光学信号转变为电学信号。纠偏模块与控制机构电性连接,将电学信号传递至控制机构,通过电学信号对铆钉安装机构10的位置进行纠正。
86.请参考图5,使用本技术的电池制造设备安装铆钉可以包括如下步骤:
87.s1、根据待安装组件上的铆钉安装位移动铆钉安装机构10上的移动板104,调整多个安装模块102之间的相对位置;
88.s2、移动机构带动铆钉安装机构10移动至铆钉储存位;
89.s3、控制机构控制吸附组件107的吸附头113伸出,并吸附铆钉;
90.s4、移动机构带动铆钉安装机构10移动至待安装位;
91.s5、纠偏模块识别各个安装模块102与对应的铆钉安装位的相对位置,在安装模块102的位置发生偏移,且偏移量超过预设值的情况下,纠偏模块发送纠偏信号至控制机构,控制机构控制驱动组件105移动以纠正安装模块102的位置;
92.s6、控制机构控制吸附组件107移动并带动吸附头113伸出,吸附头113将铆钉安装至待安装位。
93.本技术的电池制造设备包括铆钉安装机构10,铆钉安装机构10中,每个安装模块102可将一个铆钉安装至待安装位,通过在基座101上设置多个安装模块102,能够实现同时在多个铆钉安装位上安装铆钉,提高安装效率。并且,设置位置调节装置103能够调节至少
一个安装模块102的位置,能将多个安装模块102的相对位置进行变换,适应不同的铆钉安装位的安装,提高铆钉安装机构10的兼容性,进一步提高铆钉安装效率。
94.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围,其均应涵盖在本技术的权利要求和说明书的范围当中。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本技术并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。