1.本发明涉及减速电机技术领域,具体涉及一种汽车电动车门用减速执行器及其控制方法、汽车。
背景技术:
2.汽车电动车门又称为智动门,通过在汽车上安装执行器来控制车门自动开闭,不需要手动推拉操作即可完成开关门操作。现有技术中的执行器一般包括马达和减速器,其中,马达作为动力源,其马达轴与减速器连接,减速器包括一级或多级传动结构,减速器的马达轴为驱动轴,驱动轴与车门连接以驱动车门实现开闭。如中国公开专利cn106787426a和cn218494154u中均公开了类似结构。
3.现有的此类减速执行器均存在以下问题:1、当汽车所处的行驶道路坡度较陡时(实验发现大于12
°
时)车门在开启状态(包括部分开启的状态)会因受自身重力作用而关闭,也即无法保持车门悬停。如果汽车需要在这样较陡的道路停车、有乘客需要上下车的话,自动开门的功能将受到影响(可以打开,但无法保持开启状态)。2、蜗杆虽然紧配合装配在马达的马达轴上,但是还是会存在驱动不同步的问题,而且蜗杆受轴向作用力较长时间后可能引起轴向窜动,这会加剧驱动不同步的问题,使得蜗杆无法瞬时响应马达的马达轴。
4.现有技术中为解决上述的技术问题1,参考中国公开专利cn112412236a,其公开了一种车辆电动侧门控制器及其控制方法,通过检测汽车所处道路的坡度,并预先通过神经网络学习计算不同坡度下车门保持悬停的作用力,在汽车行驶过程中实时监测道路坡度,并控制电机输出相应大小的作用力。该种方案需要海量数据计算,并且实验数据无法保证与实际行驶中的数据一致,因此并不能保证对坡度和作用力的判定准确。另外,由于实际应用时要考虑不同类型汽车的车门的重量不同、实际道路上汽车两侧的坡度会有差别等因素,该方案还是可能出现无法保持悬停的情况。
技术实现要素:
5.本发明旨在一定程度上解决相关技术中的技术问题之一。为此,本发明提供了一种汽车电动车门用减速执行器及其控制方法、汽车。
6.为了达到上述目的,本发明采用如下技术方案:一种汽车电动车门用减速执行器,包括马达和减速器,所述马达具有马达轴,所述减速器具有驱动轴,所述马达轴与输入轴之间设置有第一传动机构,所述输入轴与驱动轴之间设置有第二传动机构,所述第一传动机构和第二传动机构相配合将马达轴的力矩传递至驱动轴,以通过所述驱动轴驱动所述车门开闭;所述第一传动机构包括设置于所述马达轴上的蜗杆和设置于所述输入轴上的齿轮,所述蜗杆与齿轮啮合传动;该减速执行器还包括控制单元和检测单元,所述检测单元用于在车门达到设定悬停位置后检测所述马达轴的偏转方向d1和偏转圈数n1,所述检测单元与控制单元信号连接并向控制单元传输检测数据;所述控制单元用于在偏转圈数n1达到设定偏转圈数n时控制马达轴沿转动方向d2转动且达到转动圈数n2,以使得所述车门保持在所
述设定悬停位置处,其中,d2与d1反向,n2≥n1。
7.应用本发明具有以下有益效果:设置检测单元,在车门达到设定悬停位置后对马达轴进行监测,当发现车门相对设定悬停位置偏转且达到设定偏转圈数n后,通过控制单元控制马达轴反向转动,可抵消前述的偏转,使得车门在一定的范围内往复移动,从而在宏观上(用户感官体验)实现车门保持在设定悬停位置处的效果。由于本发明的方案是基于车门的实际运动趋势给予车门作用力,因此可排除车门重量、道路坡度等因素的影响,保证悬停的稳定性。
8.可选的,所述蜗杆一体成型设置于所述马达轴上。通过将蜗杆一体成型的设置在马达轴上,可保证蜗杆与马达轴同步转动,完全消除蜗杆的滞后性。
9.可选的,所述检测单元包括霍尔传感器和磁环,所述磁环固定设置在所述马达轴上,所述霍尔传感器设置在所述马达上。
10.可选的,所述设定偏转圈数n≤10。
11.可选的,所述第二传动机构包括至少一级传动机构,所述第一传动机构和第二传动机构相配合可达到设定传动比i,其中,i≥200。车门在悬停位置处的往复移动范围受设定偏转圈数n和设定传动比i的影响,具体的,与n/i的值正相关,也即n越小、i越大则车门往复移动的范围越小,其悬停越具有稳定性。本发明中将设定传动比设计为大于200,可尽量减小n/i的值,使得车门在设定悬停位置保持较好的稳定性。
12.此外,本发明还提供了一种汽车,包括车门,还包括如上述技术方案中任一项所述的汽车电动车门用减速执行器,其中,所述驱动轴与车门连接以驱动车门开闭。本发明所提供的一种汽车与前述的减速执行器的有益效果推理过程相似,在此不再赘述。
13.此外,本发明还提供了一种汽车电动车门用减速执行器的控制方法,所述减速执行器具有用于驱动所述车门开闭的驱动轴以及带动所述驱动轴旋转的马达,所述马达的马达轴与驱动轴传动连接,该控制方法包括以下步骤:在车门达到设定悬停位置后检测所述马达轴是否发生偏转;当检测到所述马达轴发生偏转后,判断所述偏转是否过度;当判断所述偏转过度时,控制所述马达轴转动以抵消偏转。本发明所提供的一种汽车电动车门用减速执行器的控制方法与前述的减速执行器的有益效果推理过程相似,在此不再赘述。
14.可选的,判断所述偏转是否过度包括以下步骤:当检测到所述马达轴发生偏转后,记录所述马达轴的偏转方向d1和偏转圈数n1;当偏转圈数n1达到设定偏转圈数n时判断所述偏转过度。
15.可选的,控制所述马达轴转动以抵消偏转包括以下步骤:控制所述马达轴沿转动方向d2转动且达到转动圈数n2,其中,d2与d1反向,n2≥n1。
16.本发明的这些特点和优点将会在下面的具体实施方式以及附图中进行详细的揭露。本发明最佳的实施方式或手段将结合附图来详尽表现,但并非是对本发明技术方案的限制。另外,在每个下文和附图中出现的这些特征、要素和组件是具有多个,并且为了表示方便而标记了不同的符号或数字,但均表示相同或相似构造或功能的部件。
附图说明
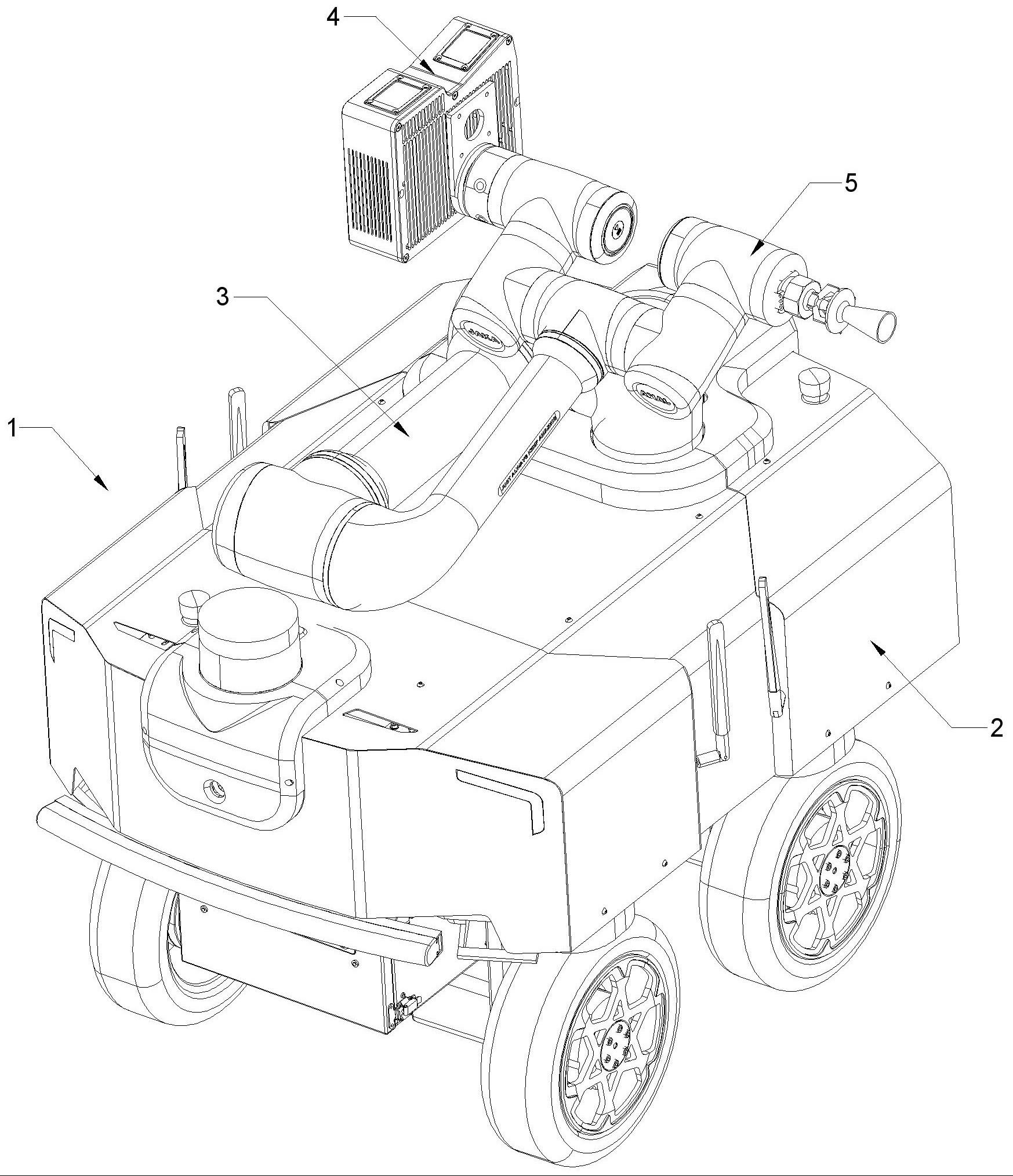
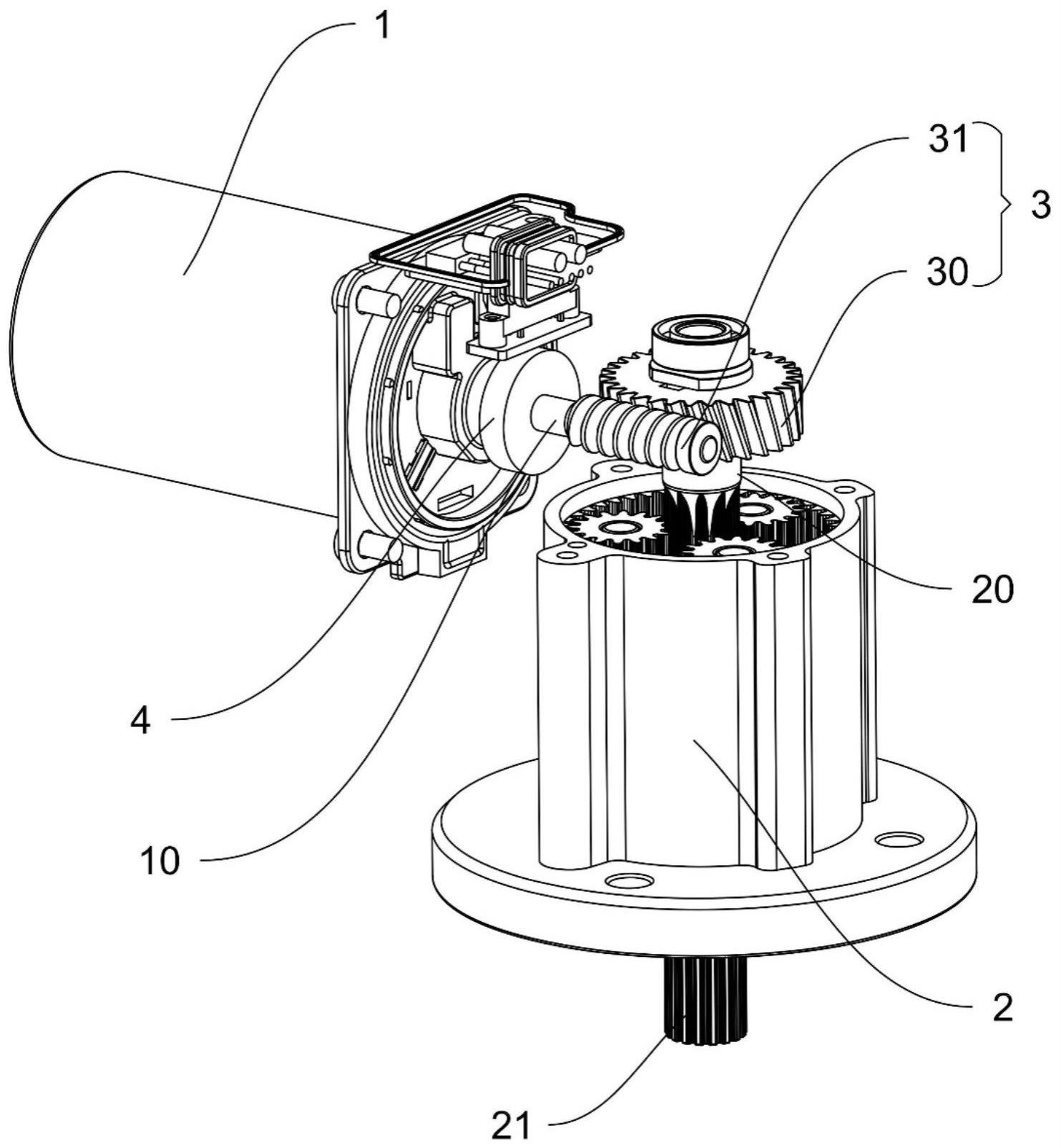
17.下面结合附图对本发明作进一步说明:图1为本发明实施例提供的一种汽车电动车门用减速执行器的结构示意图;图2为实施例提供的减速执行器的内部结构示意图;图3为安装有实施例提供的减速执行器的汽车在陡坡行驶的示意图一;图4为安装有实施例提供的减速执行器的汽车在陡坡行驶的示意图二。
18.其中,1.马达,10.马达轴,2.减速器,20.输入轴,21.驱动轴,3.第一传动机构,30.齿轮,31.蜗杆,4.磁环,5.汽车,50.车门。其中,d3为车辆朝向,d4和d5均为车门打开的方向。
具体实施方式
19.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。基于实施方式中的实施例,旨在用于解释本发明,而不能理解为对本发明的限制。
20.在本说明书中引用的“一个实施例”或“实例”或“例子”意指结合实施例本身描述的特定特征、结构或特性可被包括在本专利公开的至少一个实施例中。短语“在一个实施例中”在说明书中的各位置的出现不必都是指同一个实施例。
21.实施例:本实施例提供了一种汽车电动车门用减速执行器,如图1和图2中所示,该减速执行器包括马达1和减速器2,马达1具有马达轴10,减速器2具有输入轴20和驱动轴21,马达轴10与输入轴20之间设置有第一传动机构3,输入轴20与驱动轴21之间设置有第二传动机构,第一传动机构3和第二传动机构相配合将马达轴10的力矩传递至驱动轴21,以通过驱动轴21驱动车门开闭。第一传动机构3包括设置于马达轴10上的蜗杆31和设置于输入轴20上的齿轮30,蜗杆31与齿轮30啮合传动。第二传动机构可以采用现有技术中的行星齿轮传动结构,此处不再赘述。本实施例提供的该减速执行器还包括控制单元和检测单元,检测单元用于在车门达到设定悬停位置后检测马达轴10的偏转方向d1和偏转圈数n1,检测单元与控制单元信号连接并向控制单元传输检测数据;控制单元用于在偏转圈数n1达到设定偏转圈数n时控制马达轴10沿转动方向d2转动且达到转动圈数n2,以使得车门保持在设定悬停位置处,其中,d2与d1反向,n2≥n1。上述的“设定悬停位置”是指用户通过开关控制车门启闭时所选择的将车门悬停的位置,也即,该设定悬停位置并不是特定位置,而是用户每次开关门操作时所选择的悬停位置。例如,用户可能希望车门开启大致三分之一即可,在按下开关控制车门打开到三分之一时,用户松开手指,此时车门悬停在该位置,则该位置为本次开门操作的设定悬停位置。同理,如果用户希望车门开启大致一半,则车门开启至二分之一的位置处为设定悬停位置。关门操作也如上述所述,有时用户希望将车门关闭一部分,控制车门关闭至用户希望的位置处,则该位置为设定悬停位置。另外,上述的“偏转”是指在车门达到设定悬停位置后用户不希望出现的转动,换言之,马达轴10的偏转并不是由马达1主动驱动而导致的,而是由于车辆处于陡坡上,在重力作用下滑动而通过驱动轴21及传动机构反向驱动马达轴10形成转动,进而导致车门无法保持在设定悬停位置。
22.通过设置检测单元,在车门达到设定悬停位置后对马达轴10进行监测,当发现车门相对设定悬停位置偏转且达到设定偏转圈数n后,通过控制单元控制马达轴10反向转动,
可抵消前述的偏转,使得车门在一定的范围内往复移动,从而在宏观上(用户感官体验)实现车门保持在设定悬停位置处的效果。由于本发明的方案是基于车门的实际运动趋势给予车门作用力,因此可排除车门重量、道路坡度等因素的影响,保证悬停的稳定性。
23.应用该减速执行器时,其内在的控制逻辑说明如下:首先,在车门达到设定悬停位置后检测马达轴10是否发生偏转。在开关门操作中,由于用户需要通过开关(或遥控器等控制部件)来控制马达1工作,进而通过驱动轴21驱动车门开闭。那么当用户在操作开关或遥控器时,控制单元可检测到用户的操作,在用户停止时(也即控制马达1不再工作,停止驱动车门开闭时)即可判定为车门到达设定悬停位置。既可以通过将开关或遥控器直接与控制单元信号连通,从而控制单元可实现对用户操作信息的采集判断;也可以通过检测马达轴10的状态来判断车门是否达到设定悬停位置,例如可将检测到马达轴10连续转动的时间和圈数达到一定数量后判定为车门到达设定悬停位置。在车门到达设定悬停位置后,通过检测单元检测马达轴10是否发生转动,如果马达轴10发生转动且该转动并不是用户通过操作开关或遥控器而控制产生的,则控制单元将该转动判定为“偏转”。
24.其次,当检测到马达轴10发生偏转后,判断偏转是否过度。在该步骤中,当检测到马达轴10发生偏转后,记录马达轴10的偏转方向d1和偏转圈数n1;当偏转圈数n1达到设定偏转圈数n时判断偏转达到过度的程度。
25.最后,当判断偏转过度时,控制马达轴10转动以抵消偏转。在该步骤中,控制所述马达轴10沿转动方向d2转动且达到转动圈数n2,其中,d2与d1反向,n2≥n1。这样就可以使得马达轴10回复到设定悬停位置。
26.可以理解的是,由于在坡度较大时,车门在自身重力作用下会有沿受力方向滑动的趋势,因此虽然马达轴10会相对偏转方向d1反向转动以抵消偏转,但是在马达轴10重新回到设定悬停位置后,马达轴10停止继续转动,车门在上述滑动趋势下还会再次造成马达轴10偏转,然后控制单元在偏转过度后再次控制马达轴10反向转动抵消偏转。因此上述过程是在车门悬停的状态下一直重复进行的。
27.本实施例中的蜗杆31一体成型设置于马达轴10上。通过将蜗杆31一体成型的设置在马达轴10上,可保证蜗杆31与马达轴10同步转动,完全消除蜗杆31的滞后性。另外,本实施例中的检测单元包括霍尔传感器和磁环4,磁环4固定设置在马达轴10上,霍尔传感器设置在马达1上。本实施例中将霍尔传感器固定安装在马达轴附近壳体上或相应的在马达轴附近位置固定设置安装板,将霍尔传感器安装在马达轴附近的壳体上或上述安装板上,霍尔传感器与磁环间隔布置,两者之间具有间距且一般情况下将间距设置为小于1mm。在磁环上环绕设置有磁极,当磁环跟随马达轴转动时,霍尔传感器可以通过检测磁极的动作而检测出磁环的转动方向和圈数,进而检测出马达轴的转动方向和转动圈数。
28.进一步的,本实施例中的第二传动机构包括两级传动机构,再加上齿轮蜗杆传动机构,该减速执行器共使用到三级传动机构,此处可借鉴现有技术中的方案。本实施例中通过第一传动机构3和第二传动机构相配合可达到设定传动比i,其中,将i设计为350。车门在悬停位置处的往复移动范围受设定偏转圈数n和设定传动比i的影响,具体的,与n/i的值正相关,也即n越小、i越大则车门往复移动的范围越小,其悬停越具有稳定性。本发明中将设定传动比设计为350,可尽量减小n/i的值,使得车门在设定悬停位置保持较好的稳定性。
29.另外,本实施例中设定偏转圈数n为0.5,也即当检测到马达轴10偏转达到半圈时就判定其偏转过度。可以理解的是,在其它实施方式中,n与i的值也可以作适宜调整。在设定偏转圈数n时一方面要考虑需求(尽量将车门的微小摆动控制在肉眼不可察觉的范围内),另一方面也要考虑磁环的参数(磁极布置的越密集,霍尔传感器的检测精度越高,越能够将设定偏转圈数n的值设计较小)。因此,综合上述考虑,n≤10就可以满足需求。容易理解的是,n必然大于0,但可以较为接近0。而i的值经过实验测算,只要不小于200即可。
30.本实施例提供的该减速执行器可安装于汽车上,汽车包括车门,其中,驱动轴21与车门连接以驱动车门开闭。本实施例中提供的该汽车的车门在打开时朝向车头方向动作、关闭时朝向车尾方向动作。并且设定本实施例提供的该减速执行器,在需要开门时,马达1的马达轴10正转,在需要关门时,马达1的马达轴10反转。下面结合图3和图4中所示,详细描述汽车在较陡的道路行驶时利用该减速执行器实现车门悬停的过程:如图3中所示,以汽车5处于上坡方向且车门50需要打开一半为例进行说明。用户先通过开关或遥控器控制马达1工作,马达轴10正转带动驱动轴21驱动车门50沿d4方向打开至一半,在车门50停止后,控制单元判定车门50已经达到设定悬停位置l。由于坡度较陡,车门50沿与d4相反的方向下滑,带动驱动轴21动作并带动马达轴10反转。此时检测单元可检测到马达轴10转动,并将马达轴10的转动方向信息和转动圈数信息传输给控制单元。也即,在如图3中所示的情形下,偏转方向d1是指马达轴10的反转方向。在控制单元判定马达轴10偏转过度时,控制单元控制马达轴10沿与d1反向的方向转动以抵消偏转,也即,在如图3中所示的情形下,转动方向d2是指马达轴10的正转方向。通过上述操作使得车门50保持在设定悬停位置l处。
31.如图4中所示,以汽车5处于下坡方向且车门50需要打开一半为例进行说明。用户先通过开关或遥控器控制马达1工作,马达轴10正转带动驱动轴21驱动车门50沿d5方向打开至一半,在车门50停止后,控制单元判定车门50已经达到设定悬停位置l。由于坡度较陡,车门50沿d5方向下滑,带动驱动轴21动作并带动马达轴10正转。此时检测单元可检测到马达轴10转动,并将马达轴10的转动方向信息和转动圈数信息传输给控制单元。也即,在如图3中所示的情形下,偏转方向d1是指马达轴10的正转方向。在控制单元判定马达轴10偏转过度时,控制单元控制马达轴10沿与d1反向的方向转动以抵消偏转,也即,在如图3中所示的情形下,转动方向d2是指马达轴10的反转方向。通过上述操作使得车门50保持在设定悬停位置l处。
32.通过上述举例说明能够清楚的表明,本实施例提供的该减速执行器在应用时,其工作过程中的偏转方向并不特指正转或反转中一个方向,而是根据不同的情形,或者为马达轴10的正转方向,或者为马达轴10的反转方向。
33.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。