技术特征:
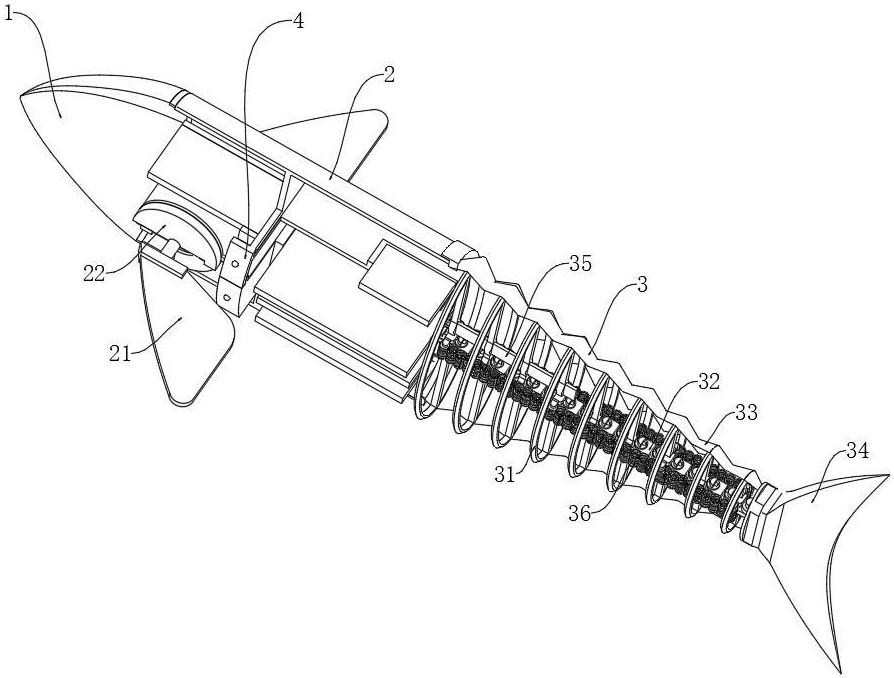
1.sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,包括鱼头(1)、鱼身(2)和鱼尾(3);所述鱼头(1)固定于所述鱼身(2)的前端,所述鱼身(2)的两侧分别转动连接有一个胸鳍(21),且所述胸鳍(21)受胸鳍转动装置(22)驱动实现旋转;每个所述胸鳍(21)内所嵌入至少两个ipmc驱动器;所述鱼尾(3)包括若干个尺寸不一的主鱼骨(31)、若干个同型的副鱼骨(32)、flex柔性传感器(35)、大应变sma驱动器(36)、鱼尾膜(33)以及尾鳍(34);所述主鱼骨(31)和副鱼骨(32)依次交替铰接,所述flex柔性传感器(35)通过方孔安装在靠近鱼身的四根主鱼骨(31)中,所述大应变sma驱动器(36)由单根sma丝来回缠绕成“8”字形,安装在主鱼骨(31)和副鱼骨(32)两侧。2.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述鱼身(2)的壳体部分采用pla材料3d打印制成,通过硅胶粘合剂进行密封粘连。3.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述胸鳍转动装置(22)受sma弹簧驱动进行转动;所述胸鳍转动装置(22)包括转动端盖(221),所述转动端盖(221)与鱼身(2)通过限位卡槽进行装配并用硅胶进行粘连固定,所述胸鳍转动装置(22)还包括主转动体(222),所述主转动体(222)的一端通过转轴与所述胸鳍(21)固定连接,所述转轴贯穿过鱼身(2)壳体并与所述鱼身(2)转动连接,所述主转动体(222)内部设置有两个弧形滑槽,两个弧形滑槽内部分别装配所述sma弹簧;所述转动端盖(221)的一侧固定有两个固定块(223),且所述固定块(223)分别位于两个滑槽内部,所述sma弹簧的一端与滑槽端壁固定,另一端与固定块(223)固定。4.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述胸鳍(21)部分将ipmc驱动器内嵌后通过浇筑成型;所述胸鳍(21)采用ecflex-0030硅胶制成,硬度为15度。5.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述鱼身(2)的两侧还均安装有仿生电极(4),所述仿生电极(4)包括有发射电极和接收电极,发射电极的正负极分布在鱼身(2)同侧,接收电极位于鱼身(2)的另一侧。6.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述主鱼骨(31)、副鱼骨(32)和尾鳍(34)采用pla材料通过3d打印直接打印而成。7.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述主鱼骨(31)与副鱼骨(32)通过扇形孔与半圆销柱进行铰接连接,端部通过垫片和销钉限位,扇形孔单侧的扫掠角为8
°
。8.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述鱼尾膜(33)外形为类波纹管结构,采用ecflex-0030硅胶制成,硬度为20度,通过硅胶与鱼身(2)和尾鳍进行粘接。9.根据权利要求1所述的sma和ipmc驱动的智能水下仿生软体机器人,其特征在于,所述主鱼骨(31)两侧还设置有四根销柱,分别贯穿过所述sma驱动器(36),将其分为三段。
技术总结
本发明涉及水下机器人技术领域,尤其涉及SMA和IPMC驱动的智能水下仿生软体机器人,包括鱼头、鱼身和鱼尾;所述鱼头固定于所述鱼身的前端,所述鱼身的两侧分别转动连接有一个胸鳍,且所述胸鳍受胸鳍转动装置驱动实现旋转。本发明通过设置的鱼尾、胸鳍,并通过SMA驱动器和IPMC驱动器进行驱动,可以实现鱼尾和胸鳍的摆动,并结合胸鳍转动装置对胸鳍的角度转动,在其配合作用下,可以有效实现机器人的直线游动、左、右转弯、上浮下潜等动作,且本机器人体积较小、重量较轻、无噪声、仿生效果好,可以在进行未知水域探测时,更易于融入鱼群并进行自主巡游。主巡游。主巡游。
技术研发人员:黄霞 黄官 尹广莹 丁军
受保护的技术使用者:重庆理工大学
技术研发日:2023.06.02
技术公布日:2023/7/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。