1.本发明涉及具备以电动方式工作的紧急停止装置的电梯装置。
背景技术:
2.在电梯装置中,为了对轿厢的升降速度始终监视,使陷入规定的过速状态的轿厢紧急停止,而具备调速器以及紧急停止装置。通常,轿厢与调速器通过调速器吊索而结合,当检测出过速状态时,调速器通过约束调速器吊索而使轿厢侧的紧急停止装置动作,使轿厢紧急停止。
3.在这样的电梯装置中,由于在升降路内铺设作为长条物的调速器吊索,而难以省空间化以及低成本化。另外,在调速器吊索振动的情况下,升降路内的构造物与调速器吊索容易干涉。
4.与此相对,提出了不使用调速器吊索而以电动方式工作的紧急停止装置。作为与这样的紧急停止装置相关的以往技术,已知有专利文献1所记载的技术。
5.在该以往技术中,在轿厢上设置有驱动紧急停止装置的驱动轴以及使驱动轴工作的工作机构。工作机构具备经由连接片而与驱动轴机械连接的可动铁芯以及吸附可动铁芯的电磁铁。驱动轴被驱动弹簧施力,但在通常时,电磁铁被通电且可动铁芯被吸附,因此驱动轴的移动被工作机构约束。
6.在紧急时,电磁铁被消磁而解除驱动轴的约束,驱动轴被驱动弹簧的作用力驱动。由此,紧急停止装置动作,而使轿厢紧急停止。
7.另外,在使紧急停止装置向通常状态复原时,使电磁铁移动而接近在紧急时移动后的可动铁芯。在电磁铁抵接于可动铁芯后,对电磁铁进行通电,将可动铁芯吸附于电磁铁。并且,在可动铁芯吸附于电磁铁的状态下,驱动电磁铁,而使可动铁芯以及电磁铁返回通常时的待机位置。
8.现有技术文献
9.专利文献
10.专利文献1:国际公开第2020/110437号
技术实现要素:
11.发明要解决的课题
12.在上述以往技术中,可动铁芯与连接片能够转动地连接。因此,可动铁芯中的与电磁铁的吸附面的朝向在紧急时若可动铁芯移动则发生变动。若吸附面的朝向的变动大,则电磁铁与可动铁芯的吸附变得不稳定,紧急停止装置的动作的可靠性有可能降低。
13.于是,本发明提供具备即使以电动方式工作也能够提高动作的可靠性的紧急停止装置的电梯装置。
14.用于解决课题的方案
15.为了解决上述课题,本发明的电梯装置具备:轿厢;紧急停止装置,其设置于轿厢;
驱动机构,其设置于轿厢,并驱动紧急停止装置;以及电动工作器,其设置于轿厢,并使驱动机构工作,电动工作器具备:可动构件;电磁铁,其与可动构件对置;机构部,其使电磁铁直线移动;以及操作杆,其连接于驱动机构,并且能够转动地连接于可动构件所具备的连接托架,在电动工作器的待机状态下,可动构件被吸附于电磁铁,从而操作杆以及驱动机构被约束,在使紧急停止装置动作时,当电磁铁被消磁而操作杆以及驱动机构的约束解除时,驱动机构工作,并且操作杆转动而使可动构件移动,电动工作器具备抑制移动后的可动构件的倾斜的构件。
16.发明效果
17.根据本发明,电动工作器的动作的可靠性提高,因此以电动方式工作的紧急停止装置的可靠性提高。
18.上述的以外的课题、结构以及效果通过以下的实施方式的说明来明确。
附图说明
19.图1是作为实施例1的电梯装置的概要结构图。
20.图2示出实施例1中的电动工作器的机构部,且是图1的设置状态下的主视图。电动工作器为工作状态。
21.图3示出实施例1中的电动工作器的机构部,且是图1的设置状态下的俯视图。电动工作器为工作状态。
22.图4示出作为比较例的电梯装置中的电动工作器的机构部。
23.图5示出实施例2中的电动工作器的机构部,且是图1的设置状态下的主视图。电动工作器为工作状态。
24.图6示出实施例2中的电动工作器的机构部,且是图1的设置状态下的俯视图。电动工作器为工作状态。
具体实施方式
25.以下,通过实施例1~2,使用附图对作为本发明的一实施方式的电梯装置进行说明。需要说明的是,在各图中,参照标记相同的构件表示相同的构成要件或者具备类似的功能的构成要件。
26.实施例1
27.图1是作为本发明的实施例1的电梯装置的概要结构图。
28.如图1所示那样,电梯装置具备轿厢1、位置传感器3、电动工作器10、驱动机构(12~20)、上拉杆21以及紧急停止装置2。
29.轿厢1被主吊索(未图示)悬吊在设置于建筑物的升降路内,并经由引导装置(未图示)能够滑动地卡合于导轨4。当利用驱动装置(卷扬机:未图示)摩擦驱动主吊索时,轿厢1在升降路内升降。
30.位置传感器3配备于轿厢1,并检测升降路内的轿厢1的位置,并且根据检测出的轿厢1的位置始终检测轿厢1的升降速度。因此,能够利用位置传感器3检测出轿厢的升降速度超过规定的过速度这一情况。
31.在本实施例1中,位置传感器3具备图像传感器,并基于由图像传感器取得的导轨4
的表面状态的图像信息,检测轿厢1的位置以及速度。例如,通过对预先计测并存储于存储装置的导轨4的表面状态的图像信息与由图像传感器所得的图像信息进行对照,从而检测轿厢1的位置。
32.需要说明的是,作为位置传感器,也可以使用设置于轿厢并与轿厢的移动一起旋转的旋转编码器。
33.电动工作器10在本实施例中为电磁操作器,并配置于轿厢1的上部。电磁操作器例如具备通过螺线管或者电磁铁而工作的可动片或者可动杆。电动工作器10在位置传感器3检测出轿厢1的规定的过速状态时工作。此时,通过与操作杆11机械连接的驱动机构(12~20),上拉杆21被上拉。由此,紧急停止装置2成为制动状态。
34.需要说明的是,关于驱动机构(12~20),见后述。
35.紧急停止装置2在轿厢1的左右各配置一台。各紧急停止装置2所具备的未图示的一对制动件在制动位置与非制动位置之间可动,在制动位置夹持导轨4,并且当由于轿厢1的下降而相对上升时,通过在制动件与导轨4之间作用的摩擦力而产生制动力。由此,紧急停止装置2在轿厢1在陷入过速状态时工作,使轿厢1紧急停止。
36.本实施例1的电梯装置具备未使用调速器吊索的所谓的无吊索调速器系统,当轿厢1的升降速度超过额定速度而达到第一过速度(例如,不超过额定速度的1.3倍的速度)时,驱动装置(卷扬机)的电源以及控制该驱动装置的控制装置的电源被切断。另外,当轿厢1的下降速度到达第二过速度(例如,不超过额定速度的1.4倍的速度)时,设置于轿厢1的电动工作器10电工作。由此,紧急停止装置2动作,而使轿厢1紧急停止。
37.在本实施例中,无吊索调速器系统由前述的位置传感器3以及基于位置传感器3的输出信号判定轿厢1的过速状态的安全控制装置构成。该安全控制装置基于位置传感器3的输出信号计测轿厢1的速度,当判定为计测的速度达到第一过速度时,输出用于切断驱动装置(卷扬机)的电源以及控制该驱动装置的控制装置的电源的指令信号。另外,安全控制装置当判定为计测的速度达到第二过速度时,输出用于使电动工作器10工作的指令信号。
38.如前述那样,当紧急停止装置2所具备的一对制动件被上拉杆21上拉时,一对制动件夹持导轨4。上拉杆21被与电动工作器10机械连接的驱动机构(12~20)驱动。
39.以下,对该驱动机构的结构进行说明。
40.电动工作器10的操作杆11与第一工作片16连结,构成大致t字状的第一连杆构件。操作杆11以及第一工作片16分别构成t字的头部以及足部。大致t字状的第一连杆构件在操作杆11与第一工作片16的连结部处经由第一工作轴19而能够转动地支承于十字头50。在成为t字的足部的工作片16中的与操作杆11和工作片16的连结部相反的一侧的端部连接一对上拉杆21的一方(图中左侧)的端部。
41.需要说明的是,电动工作器10所具备的辅助连杆构件91经由转动轴92而能够转动地支承于十字头50。关于辅助连杆构件91,见后述(图2)。
42.连接片17与第二工作片18连结,构成大致t字状的第二连杆构件。连接片17以及第二工作片18分别构成t字的头部以及足部。大致t字状的第二连杆构件在连接片17与第二工作片18的连结部处,经由第二工作轴20而能够转动地支承于十字头50。在成为t字的足部的第二工作片18中的与连接片17和第二工作片18的连结部相反的一侧的端部连接一对上拉杆21的另一方(图中右侧)的端部。
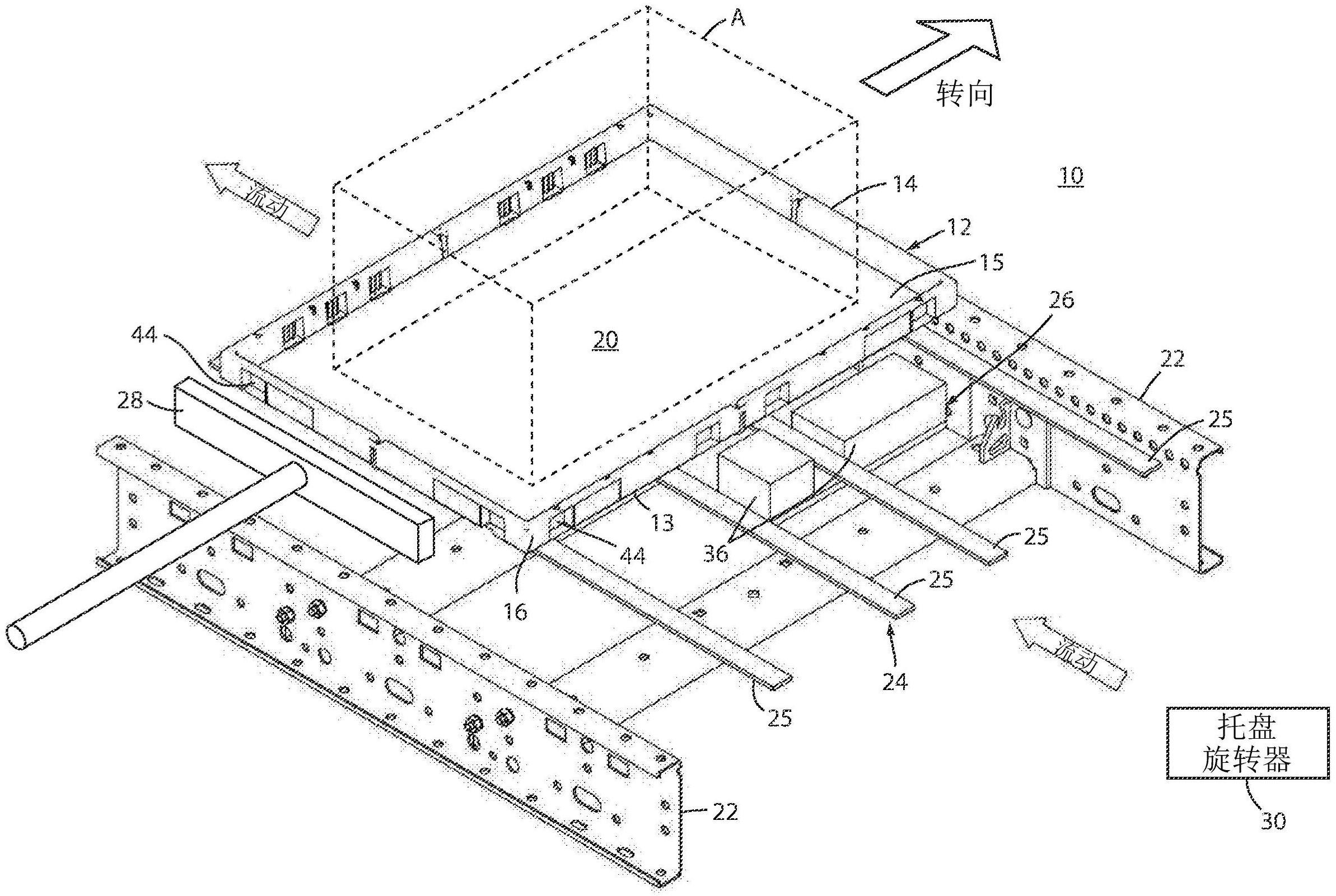
43.从壳体30的内部向外部延伸的操作杆11的端部以及连接片17的两端部中的比第二工作轴20靠近轿厢1的上部的端部分别连接于横在轿厢1上的驱动轴12的一端(图中左侧)以及另一端(图中右侧)。驱动轴12将固定于十字头50的固定部14能够滑动地贯通。另外,驱动轴12将按压构件15贯通,按压构件固定于驱动轴12。需要说明的是,按压构件15位于固定部14的第二连杆构件(连接片17、第二工作片18)侧。作为弹性体的驱动弹簧13位于固定部14与按压构件15之间,驱动轴12穿过驱动弹簧13。
44.需要说明的是,壳体30为防尘用,防止后述的电动工作器10的机构部中的尘埃的附着。操作杆11以及辅助连杆构件91在壳体30内机械连接于电动工作器10的机构部。另外,操作杆11以及辅助连杆构件91穿过壳体30的上表面中的开口部,而向壳体30外部延伸。
45.当电动工作器10工作时,即在本实施例1中当切断向电磁铁的通电时,抵抗驱动弹簧13的作用力而约束操作杆11的移动的电磁力消失,因此在施加于按压构件15的驱动弹簧13的作用力的作用下,驱动轴12被沿长度方向驱动。因此,第一连杆构件(操作杆11、第一工作片16)绕第一工作轴19转动,并且第二连杆构件(连接片17、第二工作片18)绕第二工作轴20转动。由此,与第一连杆构件的第一工作片16连接的一方的上拉杆21被驱动而被上拉,并且与第二连杆构件的第二工作片18连接的另一方的上拉杆21被驱动而被上拉。
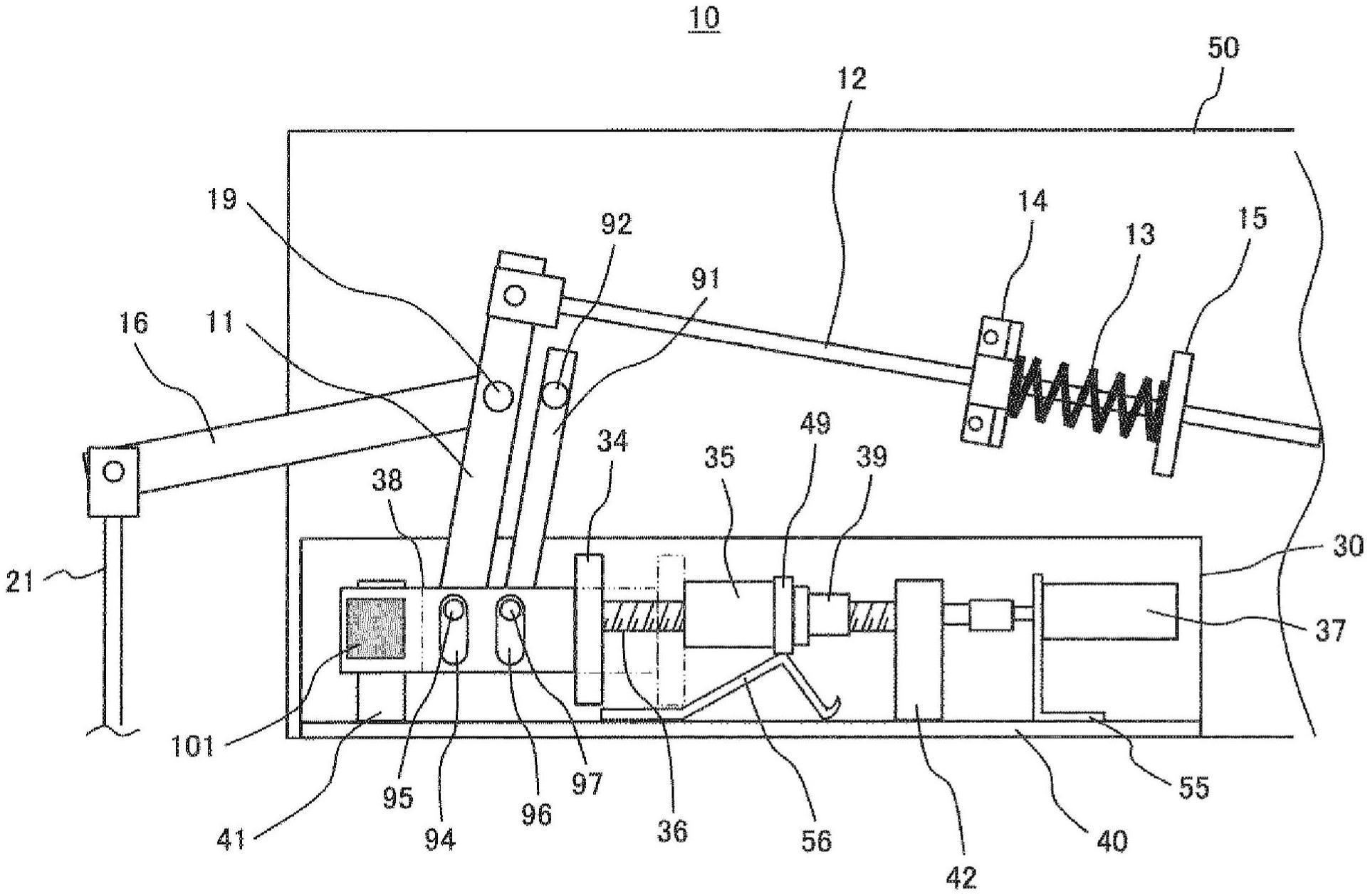
46.图2示出本实施例1中的电动工作器10的机构部,且是图1的设置状态下的主视图。另外,图3示出本实施例1中的电动工作器10的机构部,且是图1的设置状态下的俯视图。但是,在图3中,关于壳体30,省略了图示。需要说明的是,在图2以及图3中,紧急停止装置为制动状态,电动工作器10为工作状态。即,电梯装置为停止状态。
47.在电梯装置通常运转时,电动工作器10处于待机状态。如图2中的双点划线所示的那样,在待机状态(参照图6)下,与操作杆11连接的可动构件34被电磁力吸附于磁极面与可动构件34对置且线圈被通电而励磁了的电磁铁35。需要说明的是,在待机状态下,电磁铁35在图2所示的电磁铁35的位置吸附可动构件34。由此,抵抗驱动弹簧13(压缩弹簧)的作用力而约束操作杆11的移动。
48.在本实施例1中,可动构件34由磁性体构成。作为磁性体,优选的是,应用低碳素钢、坡莫合金(铁、镍合金)等软磁性体。需要说明的是,在可动构件34中,至少与电磁铁35吸附的部分为磁性体即可。
49.操作杆11与设置于可动构件34的作为连接构件的连接托架38连接。连接托架38固定于可动构件34中的与电磁铁35的吸附面的背面。连接托架38从该背面沿垂直方向延伸。在连接托架38的延伸部的中央部设置有长孔94。操作杆11的一端部经由穿过长孔94的卡合销95,而能够转动地连接于连接托架38。长孔94的长度方向是与可动构件34的前述的背面平行的方向。卡合销95能够沿着长孔94的长度方向滑动,操作杆11也能够与卡合销95一起移动。
50.如图3所示那样,在本实施例1中,连接托架38从可动构件34的前述的背面沿垂直方向延伸,并且具有相互平行地配置的两个延伸部。设置于这两个延伸部的各长孔94设置为相互对置。卡合销95穿过这些长孔94。在两个延伸部各自的两端部中的与可动构件34相反的一侧的端部设置有配重101。需要说明的是,在本实施例1中,板状的配重101的平面部与延伸部的平面部接合。
51.对连接托架38,通过配重101而以卡合销95为支点作用与由可动构件34产生的力
的力矩反向的力的力矩。因此,可动构件34中的与电磁铁35的吸附面的方向靠近电磁铁35的磁极面的方向。由此,在使电磁铁35移动而使励磁了的电磁铁35吸附可动构件34时,可动构件34被稳定地吸附于电磁铁35。需要说明的是,吸附面以及磁极面的各方向设为各面的法线方向。
52.优选的是,配重101的重量以使由配重101产生的力的力矩与由可动构件34产生的力的力矩平衡的方式设定。
53.如图2所示那样,电动工作器10具有辅助连杆构件91。辅助连杆构件91的长度方向的一端部经由转动轴92而能够转动地支承于十字头50。转动轴92与第一工作轴19相邻地配置。辅助连杆构件91的长度方向的另一端部经由穿过在连接托架38中和长孔94相邻且与长孔94相同的长孔96的卡合销97,而能够转动地连接于连接托架38。因此,辅助连杆构件91以使其长度方向与操作杆11的长度方向平行的方式与操作杆11相邻配置。
54.通过辅助连杆构件91,在紧急停止装置2的动作时,即使在从消磁了的电磁铁35分离的情况下,也能够抑制连接托架38以及可动构件34的姿态较大地变化。由此,防止连接托架38以及可动构件34与电动工作器10的基板部40、十字头50干涉。另外,通过辅助连杆构件91,在使电磁铁35移动而使励磁了的电磁铁35吸附可动构件34时,与配重101相结合,将可动构件34可靠且稳定地吸附于电磁铁35。
55.需要说明的是,即使在电动工作器10不具备辅助连杆构件91的情况下,通过配重101,也能够抑制连接托架38以及可动构件34的姿态较大地变化。
56.接着,对图2所示那样的电动工作器10的工作状态进行说明。
57.当通过来自未图示的安全控制装置的指令而停止电磁铁35的励磁时,作用于可动构件34的电磁力消失。由此,由可动构件34被吸附于电磁铁35产生的操作杆11的约束解除,因此驱动轴12被驱动弹簧13的作用力驱动。
58.当驱动轴12被驱动时,与驱动轴12连接的第一连杆构件、即操作杆11以及第一工作片绕第一工作轴19转动。由此,与第一工作片16连接的上拉杆21被上拉。
59.当如上述那样操作杆11转动时,与操作杆11连接的可动构件34沿着操作杆11的转动方向从图2中双点划线所示的位置移动到图2所示的可动构件34的位置。
60.电动工作器10为了复原为待机状态,而如下述那样,利用电动工作器10的机构部(36、37、40~42),使可动构件34从移动位置(图2)向待机时的位置(图2中的双点划线)返回。
61.如图2、3所示那样,电动工作器10为了驱动可动构件34而具有位于基板部40的水平的平面部上的进给丝杠36。进给丝杠36被在基板部40的平面上固定的第一支承构件41以及第二支承构件42支承为能够旋转。电磁铁35固定于芯板49中的可动构件34侧。在芯板49中,在与固定电磁铁35的一侧相反的一侧固定进给螺母39。进给螺母39与进给丝杠36螺合。进给丝杠36通过马达37而旋转。
62.基板部40载置并固定于轿厢1上或者十字头50中的水平的平面部上。因此,电动工作器10的机构部位于轿厢1上或者十字头50的水平的平面部上。需要说明的是,基板部40也可以由轿厢1上或者十字头50中的水平的平面部构成。
63.为了使电动工作器10复原为待机状态,首先,在将电磁铁35励磁的同时,驱动马达37而使进给丝杠旋转。通过旋转的进给丝杠36以及经由芯板49而设置于电磁铁35的进给螺
母39,马达37的旋转被变换为沿着进给丝杠36的轴向的电磁铁35的直线的移动。由此,电磁铁35靠近图2所示的可动构件34的移动位置,可动构件34被作用由电磁铁35产生的电磁力,而吸附于电磁铁35。需要说明的是,电磁铁35也可以不励磁而移动,在抵接于可动构件34后励磁。
64.在可动构件34吸附于电磁铁35后,在继续电磁铁35的励磁的同时,使马达37的旋转方向反转,而使进给丝杠36反转。由此,可动构件34与电磁铁35一起移动到待机时的位置。
65.在电动工作器10的基板部40上,在待机状态下的电磁铁35的下方设置有由作为弹性体的板簧构成的辅助保持部56。辅助保持部56抵接于芯板49或进给螺母39。需要说明的是,在图2中,辅助保持部56抵接于芯板49。辅助保持部56对芯板49以及进给螺母39朝向进给丝杠36施力。由此,防止由于在轿厢1(图1)的动作时产生的振动而进给螺母39移动的情况。
66.图4示出作为比较例的电梯装置中的电动工作器的机构部。
67.在本比较例中,连接托架38不具备配重101(图2、3)。
68.在本比较例中,可动构件34在紧急停止装置2的动作时,当从待机时的位置(图2的双点划线)移动到图4的位置时,如图4所示那样,相对于进给丝杠36的长度方向较大地倾斜。因此,在使电磁铁35移动而使可动构件34吸附于电磁铁35时,电磁铁35与可动构件34的吸附状态变得不稳定。并且,电磁铁35与可动构件34相互局部地抵接,因此可动构件34或者电磁铁35有可能损伤。
69.与此相对,在本实施例1中,通过配重101抑制可动构件34的倾斜,因此电磁铁35与可动构件34被稳定地吸附。并且,防止电磁铁35与可动构件34的损伤。
70.如上述那样,根据实施例1,作为抑制可动构件34的倾斜的构件,在将可动构件34与操作杆11连接的连接托架38设置配重101,从而可动构件34与电磁铁35的吸附的稳定性提高。由此,电动工作器10的动作的可靠性提高,因此紧急停止装置2的动作的可靠性提高。
71.需要说明的是,根据本实施例1,并不限于检知出轿厢1的过速状态时,在停电时,也同样地,电动工作器10的动作的可靠性提高。
72.实施例2
73.接着,对作为本发明的实施例2的电梯装置进行说明。需要说明的是,本实施例2的概要结构与实施例1(图1)相同。
74.图5示出本实施例2中的电动工作器10的机构部,且是图1的设置状态下的主视图。另外,图6示出本实施例2中的电动工作器10的机构部,且是图1的设置状态下的俯视图。但是,在图6中,关于壳体30,省略了图示。需要说明的是,在图5以及图6中,紧急停止装置为制动状态,电动工作器10为工作状态。即,电梯装置为停止状态。
75.以下,主要对与实施例1不同的点进行说明。
76.在本实施例2中,电动工作器10具备限制连接托架38的移动的限位构件111,来作为抑制可动构件34中的与电磁铁35的吸附面的方向相对于电磁铁的磁极面的方向倾斜的构件。
77.限位构件111设置于限位支承构件112,该限位支承构件112在基板部40上固定于与连接托架38的从可动构件34延伸的延伸部的自由端部对置的位置。
78.在紧急停止装置2的动作时,当伴随着操作杆11绕工作轴19转动而可动构件34以及连接托架38移动时,连接托架38的延伸部的自由端部抵接于限位构件111。由此,进给丝杠36的长度方向上的可动构件34以及连接托架38的移动量被限制。由此,可动构件34的倾斜被抑制。
79.另外,限位构件111在连接托架38的延伸部的自由端部中的沿着长孔94的长度方向从卡合销95分离的位置、在本实施例2中为卡合销95的下方的位置,抵接于连接托架38的延伸部的自由端部。
80.由此,对连接托架38,以卡合销95为支点,与由可动构件34产生的力的力矩反向地作用由连接托架38的延伸部的自由端部从限位构件111受到的反作用力产生的力的力矩。因此,可动构件34中的与电磁铁35的吸附面的方向靠近电磁铁35的磁极面的方向。即,可动构件34的倾斜被抑制。由此,在使电磁铁35移动而使励磁了的电磁铁35吸附可动构件34时,可动构件34被稳定地吸附于电磁铁35。
81.需要说明的是,作为限位构件111,例如应用螺栓。在该情况下,螺栓轴的前端抵接于连接托架38。另外,通过在限位支承构件设置与螺栓螺合的螺纹部,能够调整对连接托架38的移动进行限制的位置。由此,能够可靠地抑制可动构件34的倾斜。
82.如上述那样,根据实施例2,作为抑制可动构件34的倾斜的构件,设置对可动构件34以及连接托架38的移动量进行限制的限位构件,从而可动构件34与电磁铁35的吸附的稳定性提高。由此,电动工作器10的动作的可靠性提高,因此紧急停止装置2的动作的可靠性提高。
83.根据本实施例2,与实施例1同样地,并不限于检知出轿厢的过速状态时,在停电时,电动工作器10的动作的可靠性也提高。
84.需要说明的是,本发明并不限定于前述的实施例,包括各种变形例。例如,前述的实施例为了容易理解地说明本发明而详细进行了说明,未必限定于具备所说明的全部的结构。另外,能够对实施例的结构的一部分进行其他结构的追加、删除、置换。
85.例如,电动工作器10除了轿厢1的上方部,也可以设置于下方部、侧方部。在这些情况下,电动工作器10的机构部位于轿厢1或者轿厢框等轿厢构造构件中的水平的平面部上。
86.附图标记说明:
87.1轿厢,2紧急停止装置,3位置传感器,4导轨,10电动工作器,11操作杆,12驱动轴,13驱动弹簧,14固定部,15按压构件,16工作片,17连接片,18工作片,19工作轴,20工作轴,21上拉杆,30壳体,34可动构件,35电磁铁,36进给丝杠,37马达,38连接托架,39进给螺母,40基板部,41进给丝杠支承构件,42进给丝杠支承构件,49芯板,50十字头,55马达固定托架,56辅助保持部,91辅助连杆构件,92转动轴,94长孔,95卡合销,96长孔,97卡合销,101配重,111限位构件,112限位支承构件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。