1.本实用新型涉及物流运输设备技术领域,具体涉及一种仓储货物转运系统。
背景技术:
2.随着市场对于物流自动化装备需求的不断增加,机器人在物流行业得到越来越广泛的应用,已经深入到仓储、配送各个环节。此方式不仅提高了物流作业效率,减轻了工作人员的劳动强度,还有助于优化资源、降低成本,具有良好的经济效益和广阔的发展前景。
3.现有技术中,在仓储环境中布置有若干置物架,置物架上用于摆放多个相同或者不同类别的货品。而若干置物架通常是固定式的,仍然需要人工或者采用机器人逐一将货物搬运到层架附近,然后人工进行逐层归类码放,这种处理方式仍然会耗费相当高的人力物力,不易于提高工作效率。
技术实现要素:
4.本实用新型的目的在于提供一种仓储货物转运系统,用以解决现有技术中采用人工或者采用机器人逐一将货物搬运到置物架附近,然后进行逐层归类码放货物方式,工作效率不能得到有效提升的技术问题。
5.基于上述目的,本技术提供的一种仓储货物转运系统,包括:置物架、导轨滑块机构、升降调节机构、搬运机器人和货品推送装置;
6.所述置物架包括支撑架和多个置物板,多个所述置物板间隔连接在所述支撑架的内侧;
7.所述导轨滑块机构设置在所述置物架同一侧的两个支撑架上;
8.所述升降调节机构设置在所述支撑架的顶部,用于驱使所述导轨滑块机构移动;
9.所述货品推送装置包括置物箱和推动机构,所述置物箱用于放置货品,所述置物箱包括底板、两个第一侧板和第二侧板,两个第一侧板及一个第二侧板分别与底板连接,所述第二侧板的相对侧设置有用于货物进出的开口,所述推动机构与所述第二侧板连接,所述第一侧板的外壁设置有连接杆,所述连接杆与所述导轨滑块机构之间通过卡接机构可拆卸连接;
10.所述搬运机器人用于运输所述货品推送装置。
11.进一步地,所述导轨滑块机构包括导轨和滑动块,所述导轨与支撑架连接,所述滑动块与所述导轨滑动连接,所述连接杆与所述滑动块之间通过卡接机构可拆卸连接,所述升降调节机构用于驱使所述滑动块相对导轨移动。
12.进一步地,所述升降调节机构包括电机和丝杠,所述电机与所述丝杠连接,丝杠的两端部分别通过轴承与导轨的两端连接,所述滑动块与所述丝杠螺纹连接。
13.进一步地,所述推动机构包括推动板体和伸缩驱动件,所述伸缩驱动件的固定端与所述第二侧板连接,所述伸缩驱动件的伸缩端与所述推动板体连接,以通过推动板体将货物由置物箱推送至对应的置物板上。
14.进一步地,所述伸缩驱动件采用电动缸或者气缸。
15.进一步地,所述卡接机构包括气动机械爪,所述气动机械爪的固定端与所述滑动块连接,所述气动机械爪能够夹持或释放所述连接杆,所述支撑架上设置有气泵,所述气泵通过电磁阀及管道与所述气动机械爪连接。
16.进一步地,所述气动机械爪为双爪型机械爪。
17.进一步地,述连接杆的外壁设置防滑纹。
18.进一步地,所述搬运机器人采用agv小车
19.进一步地,包括控制器,所述控制器与所述电机及所述电磁阀电连接。
20.采用上述技术方案,本技术提供的仓储货物转运系统,相比于现有技术,具有的技术效果有:
21.导轨滑块机构设置在置物架同一侧的两个支撑架上,升降调节机构用于驱使导轨滑块机构移动;货品推送装置包括置物箱和推动机构,置物箱用于放置货品,置物箱包括底板、两个第一侧板和第二侧板,两个第一侧板及一个第二侧板分别与底板连接,第二侧板的相对侧设置有用于货物进出的开口,推动机构与第二侧板连接,利用推动机构可以将置物箱上的货物推送至置物架上,第一侧板的外壁设置有连接杆,连接杆与导轨滑块机构之间通过卡接机构可拆卸连接,使得升降调节机构可以通过导轨滑块机构带动连接杆上下移动,进而调整置物箱在置物架上的高度,以将货物推送至对应的置物板上,搬运机器人用于运输货品推送装置;相比于现有人工或者机器人逐一将货物运输至层架后人工进行码放的方式,本技术技术方案可以提升工作效率,降低人力物力的损耗。
附图说明
22.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
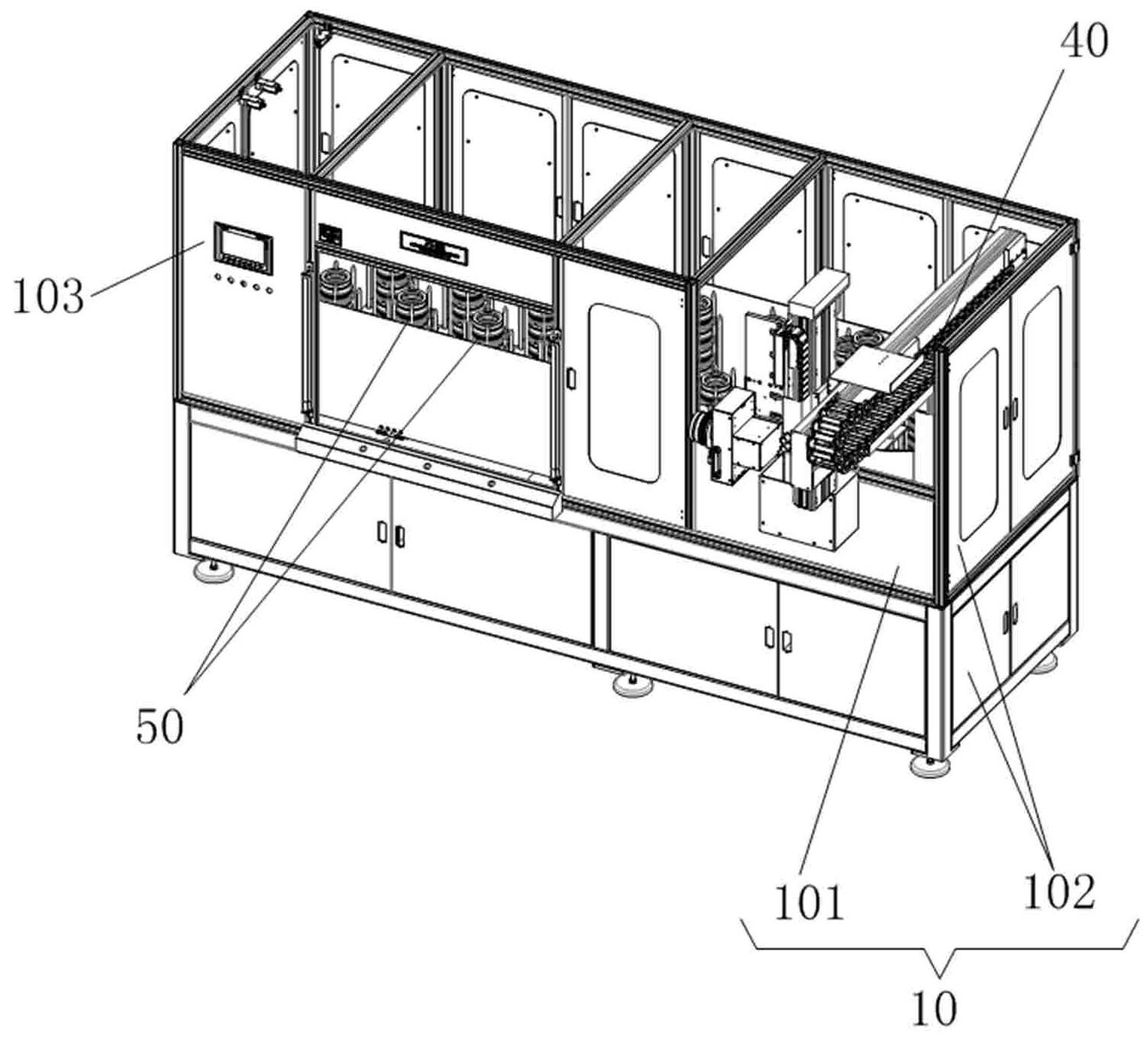
23.图1为本技术提供的仓储货物转运系统的结构示意图;
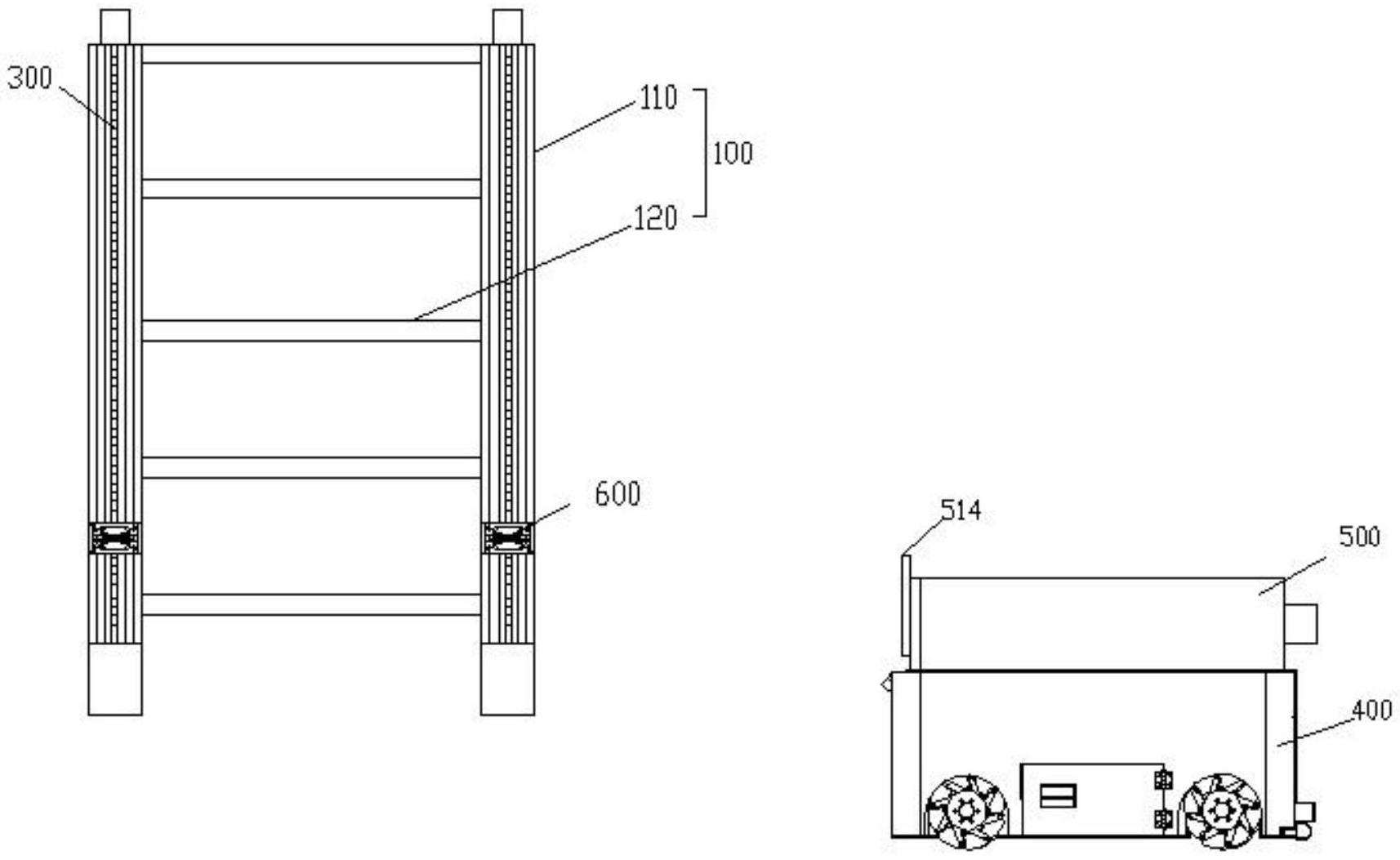
24.图2为本技术提供的导轨滑块机构及升降调节机构的结构示意图;
25.图3为本技术提供的货品推送装置的结构示意图;
26.图4为本技术提供的卡接机构的结构示意图。
27.图标:100-置物架;110-支撑架120-置物板;200-导轨滑块机构;210-导轨;220-滑动块;300-升降调节机构;310-电机;320-丝杠;400-搬运机器人;500-货品推送装置;510-置物箱;511-底板;512-第一侧板;513-第二侧板;514-连接杆;520-推动机构;521-推动板体;522-伸缩驱动件;600-卡接机构。
具体实施方式
28.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.本技术实施例提供的一种仓储货物转运系统,主要用于对用于码放货物的层架进行搬运移动至指定区域,便于对货物进行同一码放,相对于现有采用将货物逐一运输至固定式的层架附近,再进行码放的方式,本方案可以实现工作效率的提升,并节省一定的人力物力。
30.具体的,请参照图1至图4所示,本技术实施例提供的仓储货物转运系统,包括:置物架100、导轨滑块机构200、升降调节机构300、搬运机器人400和货品推送装置500;
31.其中,置物架100包括支撑架110和多个置物板120,多个置物板120间隔连接在支撑架110的内侧;
32.导轨滑块机构200设置在置物架100同一侧的两个支撑架110上;
33.升降调节机构300设置在支撑架110的顶部,用于驱使导轨滑块机构200移动,具体为驱动导轨滑块机构200中的滑动块220上下移动;
34.货品推送装置500包括置物箱510和推动机构520,置物箱510用于放置货品,置物箱510包括底板511、两个第一侧板512和第二侧板513,两个第一侧板512及一个第二侧板513分别与底板511连接,第二侧板513的相对侧设置有用于货物进出的开口,推动机构520与第二侧板513连接,推动机构520能够朝向开口移动,用以将货物推出置物箱510,两个第一侧板512的外壁分别设置有连接杆514,连接杆514的上端高于第一侧板512的上端面,连接杆514与导轨滑块机构200之间通过卡接机构600可拆卸连接;搬运机器人400用于运输货品推送装置500。
35.应用时,将货品推送装置500放置在搬运机器人400的上方,利用搬运机器人400移动至正对置物架100的位置,置物箱510的连接杆514与导轨滑块机构200通过卡接机构600连接,通过升降调节机构300驱使导轨滑块机构200带动置物箱510移动至对应的空置的置物板120位置,由推动机构520能够朝向开口移动,用以将货物推出置物箱510,使货品落入至置物板120上,实现货物的自动搬运和码放的功能。
36.一个可选实施例中,导轨滑块机构200包括导轨210和滑动块220,导轨210设置两根,并分别与支撑架110连接,滑动块220与导轨210滑动连接,连接杆514与滑动块220之间通过卡接机构600可拆卸连接,升降调节机构300用于驱使滑动块220相对导轨210移动,进而可以带动连接杆514及置物箱510上下移动。
37.一个可选实施例中,升降调节机构300包括电机310和丝杠320,电机310设置在支撑架110的顶部,电机310的转轴与丝杠320连接,丝杠320的两端部分别通过轴承与导轨210的两端连接,滑动块220与丝杠320螺纹连接,电机310驱动丝杠320旋转,使滑动块220可以相对导轨210上下移动。
38.一个可选实施例中,推动机构520包括推动板体521和伸缩驱动件522,伸缩驱动件522的固定端与第二侧板513连接,伸缩驱动件522的伸缩端与推动板体521连接,以通过推动板体521将货物由置物箱510推送至对应的置物板120上。
39.本实施例中,伸缩驱动件522可以采用电动缸或者气缸,当采用气缸时,可以在第二侧板513上装配小型储气瓶,储气瓶通过电磁阀及管道与气缸连接;此外,在第二侧板513上装配小型蓄电池,用于对电动缸供电及电磁阀供电。
40.本实施例中,在第二侧板513上设置有驱动件控制器,用于驱动电动缸或者电磁阀工作。
41.如图4所示,一个可选实施例中,卡接机构600包括气动机械爪,气动机械爪为双爪型机械爪,气动机械爪的固定端与滑动块220连接,气动机械爪能够夹持或释放连接杆514,支撑架110上设置有气泵,气泵通过电磁阀及管道与气动机械爪连接,用于对气动机械爪供气。
42.需要说明的是,由于气动机械爪属于现有产品,本实施例中不再对其具体结构进行展开说明。
43.一个可选实施例中,连接杆514的外壁设置防滑纹,用于增加连接杆514与气动机械爪之间的摩擦力,提高连接牢固性。
44.一个可选实施例中,搬运机器人400采用agv小车,agv小车自搭载导航模块,可以自主移动至预设的置物架100位置。
45.本实施例提供的仓储货物转运系统中,还包括控制器,控制器与电机310及电磁阀电连接,用于分别驱动电机310及电磁阀动作。
46.本技术实施例中提供的仓储货物转运系统中,通过搬运机器人400将货品推送装置500连同货物运输至置物架100所处位置,使置物箱510两侧的连接杆514伸入至气动机械爪内;
47.利用气动机械爪夹紧连接杆514后,电机310驱动丝杠320转动,使滑块带动机械爪向上移动至指定的位置,该位置对应空置的置物板120;
48.利用伸缩驱动件522驱使推动板体521移动,将货物推送至指定至置物板120上。相比于现有人工或者机器人逐一将货物运输至层架后人工进行码放的方式,本技术技术方案可以提升工作效率,降低人力物力的损耗。
49.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。