一种h-mmc电机驱动系统同频运行的综合控制方法
技术领域
1.本发明属于直接交交变流器控制领域,特别涉及一种h-mmc电机驱动系统同频运行的综合控制方法。
背景技术:
2.随着现代工业技术的不断进步,中高压大功率电机在各个领域的应用越来越广泛。例如在机车牵引、船舰推进和抽水蓄能等方面,这种电机都发挥着重要的作用。
3.大功率电机是将电能转化为机械能重要装置,也是工业生产中不可或缺的一环,全球约1/3的发电量都用于工业电机驱动。采用中高压变频器驱动大功率电机,不仅可以提供较优的调速性能,还可以提高生产效率,节约电能,是大功率电机驱动最具竞争力的方案。
4.多电平变频器交流侧电流谐波含量低,器件电压应力低,逐渐成为中高压变频器拓扑的主要选择。h-mmc是mmc家族的一种,不仅继承了mmc具有的模块化设计、高质量的电压波形和低平均开关频率等优点,相比mmc还能实现电能直接交交变换,有着较好的低频特性,非常适合大功率电机驱动的应用场合。
5.目前h-mmc电机驱动系统亟待解决的一个关键问题就是当机侧网侧频率几近相同时,h-mmc桥臂的差频功率将会趋近于无穷大,使得桥臂子模块电容电压不断增大或减小,可能损坏电容器和其他设备。然而,目前针对该问题并未有具体的解决方案提出。mmmc也是一种由9桥臂构成的直接交交变换mmc,尚有一些文献提出了基于该拓扑的同频解决方案,比如输入端引入环流和共模电压在桥臂产生附加功率平衡差频功率的方法,但更大的环流增加了损耗,也使器件应力增大;还有对mmmc内部环流进行优化抑制纹波的方法,但此方法使得控制复杂度增大。
技术实现要素:
6.针对上述背景技术描述的缺点和不足,本发明提出了一种h-mmc电机驱动系统同频运行的综合控制方法,具有纹波抑制效果好,控制简单,无需增大注入环流即可实现同频工况稳定运行的优点。
7.本发明所提供的技术方案如下:
8.一种h-mmc电机驱动系统同频运行的综合控制方法,其特征在于所述的基于h-mmc电机驱动系统由h-mmc、永磁同步电动机和交流电网组成;
9.所述的h-mmc由六个相同的桥臂首尾相连形成一个环形结构,每个桥臂是由n个级联的全桥子模块和一个电抗器l
x
串连而成,下标x表示第x个桥臂,x=1,2,3
…
6;全桥子模块记为sm
x_y
,下标y表示第y个全桥子模块,y=1,2,3
…
n;4个igbt(s1、s2、s3、s4)和1个电容器c构成一个全桥子模块,s1的发射极和s3的集电极相连且连接点称为全桥子模块的正极,s2的发射极和s4的集电极相连且连接点称为全桥子模块的负极,s1、s2的集电极和电容器的正极相连,s3、s4的发射极和电容器的负极相连;桥臂x的第一个全桥子模块sm
x_1
的正极称为
桥臂x的首端,sm
x_1
的负极与桥臂x的第二个全桥子模块sm
x_2
的正极相连,按此规律顺序连接,桥臂x的第n个子模块sm
x_n
的负极与电抗器l
x
的一端相连,l
x
的另一端称为桥臂x的尾端;o1、o2、o3、o4、o5和o6分别为h-mmc的六个端点;
10.所述的电网u、v、w三相分别与h-mmc的o4、o6、o2点相连;永磁同步电动机的r、s、t三相分别与h-mmc的o1、o3、o5点相连;o1点和o2点之间支路称为桥臂1;o2点和o3点之间支路称为桥臂2;o3点和o4点之间支路称为桥臂3;o4点和o5点之间支路称为桥臂4;o5点和o6点之间支路称为桥臂5;o6点和o1点之间支路称为桥臂6;
11.所述的一种h-mmc电机驱动系统同频运行的综合控制方法由补偿相角计算、机侧转速控制、网侧功率控制、桥臂子模块稳压均压控制和调制波计算5个部分构成;
12.所述的补偿相角计算由如下步骤组成:
13.(1)使用编码器实时检测永磁同步电动机转速n,根据n计算电机频率fm:
14.fm=n
×
p/60
15.其中,p为永磁同步电动机极对数,可通过查阅电机说明书得到;
16.(2)实时检测机侧线电压和机侧相电流,分别将检测时刻前23ms内的幅值数据保存至控制器的数据寄存器;
17.(3)根据传感器的采样率s
am
;计算从数据寄存器提取的数据个数nm:
18.nm=s
am
/fm19.其中,s
am
可通过查阅传感器数据手册得到;
20.(4)计算机侧相电压的有效值vm和机侧相电流的有效值im:
[0021][0022][0023]
其中,v
mj
、i
mj
分别是从数据寄存器中提取的机侧线电压和机侧相电流数据;
[0024]
(5)实时检测网侧相电流,并将检测时刻前20ms内的幅值数据保存至控制器的数据寄存器;
[0025]
(6)计算从数据寄存器提取的数据个数ng:
[0026]
ng=s
am
/50
[0027]
(7)计算网侧相电流的有效值ig:
[0028][0029]
其中,i
gj
分别是从数据寄存器中提取的网侧相电流数据;
[0030]
(8)将机侧线电压转化为机侧相电压,网侧线电压转化为网侧相电压,分别将机侧相电压、机侧相电流、网侧相电压、网侧相电流进行锁相环计算得到机侧相电压相角θ
m1
、机侧相电流相角θ
m2
、网侧相电压相角θ
g1
、网侧相电流相角θ
g2
;当θ
m1
=0时,将此刻的机侧相电流相角送入控制器的数据寄存器;当θ
g1
=0时,将此刻的网侧相电流相角送入控制器的数据寄存器;
[0031]
(9)将vm、im、ig、网侧相电压有效值vg、和代入下式计算补偿相角
[0032][0033]
其中,t为控制周期;
[0034]
所述的机侧转速控制由如下步骤组成:
[0035]
(1)通过传统的电机转速双环控制获取机侧d轴电压参考值u
md_ref
和q轴电压参考值u
mq_ref
[0036]
(2)将θ
m1
与相加得到调整后的电机相角θm:
[0037][0038]
(3)使用调整后的电机相角θm对u
md_ref
和u
mq_ref
进行dq/abc变换得到机侧三相电压参考值u
mr_ref
、u
ms_ref
、u
mt_ref
;
[0039]
所述的网侧功率控制由如下步骤组成:
[0040]
(1)检测h-mmc所有子模块电容电压u
c_xy
,计算子模块电容电压平均值u
c_ave
:
[0041][0042]
(2)将子模块电容电压参考值u
c_ref
与u
c_ave
相减,差值送入第三pi控制器,得到网侧d轴电流参考值i
gd_ref
:
[0043]igd_ref
=(u
c_ref-u
c_ave
)
×
(k
p3
k
i3
×
(1/s))
[0044]
其中,k
p3
和k
i3
分别为第三pi控制器的比例系数和积分系数;
[0045]
(3)检测网侧三相电压u
gu
、u
gv
、u
gw
,将其进行abc/αβ变换得到网侧α轴电压u
gα
和网侧β轴电压u
gβ
;
[0046]
(4)令网侧q轴电流参考值i
gq_ref
等于0,将i
gd_ref
、i
gq_ref
进行dq/αβ变换得到网侧α轴电流参考值i
α_ref
和网侧β轴电流参考值igβ_ref;
[0047]
(5)检测网侧三相电流iu、iv、iw,将其进行abc/αβ变换得到网侧α轴电流实际值i
gα
和网侧β轴电流实际值igβ;
[0048]
(6)将i
gα_ref
和i
gα
相减,差值送入第一准pr控制器,第一准pr控制器的输出再与u
gα
相加得到网侧α轴电压参考值u
gα_ref
;将i
gβ_ref
和i
gβ
相减,差值送入第一准pr控制器,第一准pr控制器的输出再与u
β
相加得到网侧β轴电压参考值u
gβ_ref
;
[0049]
(7)将u
gα_ref
和u
gβ_ref
进行αβ/abc变换得到网侧三相电压参考值u
gu_ref
、u
gv_ref
、u
gw_ref
;
[0050]
所述的桥臂子模块稳压均压控制由如下步骤组成:
[0051]
(1)采用通用的层次化电容电压平衡控制得到中性点电压参考值u
st_ref
,采用通用的层次化电容电压平衡控制和环流控制得到桥臂电压参考值叠加量u
cir_ref
;
[0052]
(2)采用通用的子模块均压控制得到桥臂x第y个子模块调制波的叠加量u
xy_add
:
[0053]
所述的调制波计算由如下步骤组成:
[0054]
(1)将u
mr_ref
、u
ms_ref
、u
mt_ref
、u
gu_ref
、u
gv_ref
、u
gw_ref
、u
st_ref
和u
cir_ref
带入下式计算得到各桥臂电压调制波u
x_ref
:
[0055]u1_ref
=u
gw_ref-u
mr_ref-u
st_ref
u
cir_refu2_ref
=u
ms_ref-u
gw_ref
u
st_ref
u
cir_refu3_ref
=u
gu_ref-u
ms_ref-u
st_ref
u
cir_refu4_ref
=u
mt_ref-u
gu_ref
u
st_ref
u
cir_refu5_ref
=u
gv_ref-u
mt_ref-u
st_ref
u
cir_refu6_ref
=u
mr_ref-u
gv_ref
u
st_ref
u
cir_ref
[0056]
(2)将u
x_ref
除以n后和u
xy_add
相加得到桥臂x第y个子模块的调制波u
xy_ref
:
[0057]uxy_ref
=1/n
×ux_ref
u
xy_add
[0058]
(3)对u
xy_ref
采用载波移相调制得到igbt的开关信号。
[0059]
本发明的有益效果是:1)针对h-mmc电机驱动系统同频运行工况,提出了一种综合控制方法,有效抑制了桥臂子模块电容电压波动,保证了系统稳定运行;2)无需增加任何控制器且控制方法简单;3)所需环流较小,降低了系统损耗。
附图说明
[0060]
图1为h-mmc电机驱动系统结构图;
[0061]
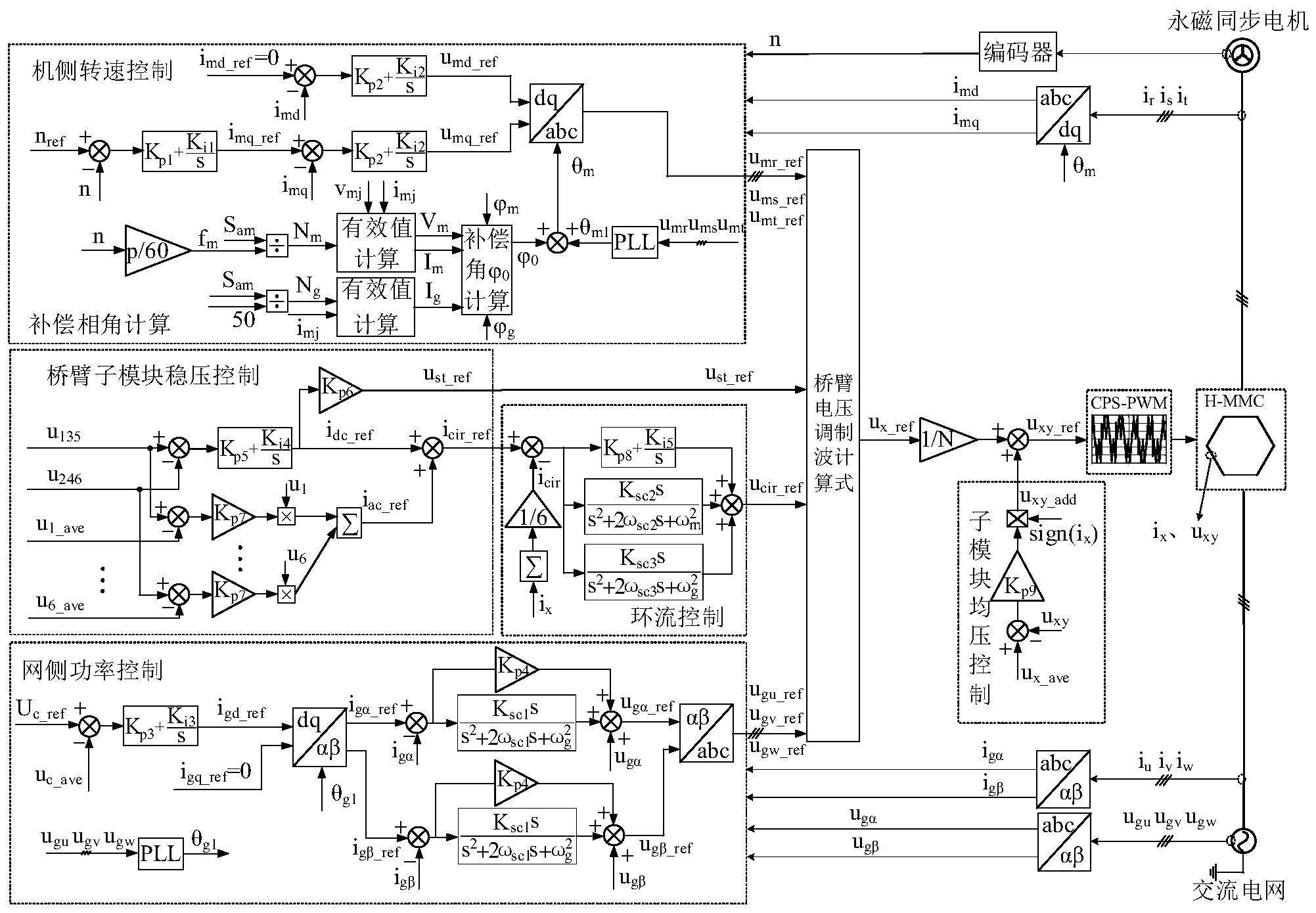
图2为h-mmc电机驱动系统同频运行的综合控制框图;
[0062]
图3为电机转速波形;
[0063]
图4为桥臂1和桥臂2中各三个子模块电容电压波形。
具体实施方式
[0064]
为了使本发明所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图对本发明进行进一步详细说明。应当理解,此处所描述的具体实例仅仅用以解释本发明,并不用于限定本发明。
[0065]
图1是h-mmc电机驱动系统结构图,本发明中基于h-mmc电机驱动系统由h-mmc、永磁同步电动机和交流电网组成;h-mmc由六个相同的桥臂首尾相连形成一个环形结构,每个桥臂是由n个级联的全桥子模块和一个电抗器l
x
串连而成,下标x表示第x个桥臂,x=1,2,3
…
6;全桥子模块记为sm
x_y
,下标y表示第y个全桥子模块,y=1,2,3
…
n;4个igbt(s1、s2、s3、s4)和1个电容器c构成一个全桥子模块,s1的发射极和s3的集电极相连且连接点称为全桥子模块的正极,s2的发射极和s4的集电极相连且连接点称为全桥子模块的负极,s1、s2的集电极和电容器的正极相连,s3、s4的发射极和电容器的负极相连;桥臂x的第一个全桥子模块sm
x_1
的正极称为桥臂x的首端,sm
x_1
的负极与桥臂x的第二个全桥子模块sm
x_2
的正极相连,按此规律顺序连接,桥臂x的第n个子模块sm
x_n
的负极与电抗器l
x
的一端相连,l
x
的另一端称为桥臂x的尾端;o1、o2、o3、o4、o5和o6分别为h-mmc的六个端点;电网u、v、w三相分别与h-mmc的o4、o6、o2点相连;永磁同步电动机的r、s、t三相分别与h-mmc的o1、o3、o5点相连;o1点和o2点之间支路称为桥臂1;o2点和o3点之间支路称为桥臂2;o3点和o4点之间支路称为桥臂3;o4点和o5点之间支路称为桥臂4;o5点和o6点之间支路称为桥臂5;o6点和o1点之间支路称为桥臂6。
[0066]
在本实例中,永磁同步电动机极对数p为4,参考转速n
ref
为750,h-mmc的电抗器l
x
为10mh,电容器c大小为20mf,桥臂全桥子模块个数n为6,全桥子模块电容电压额定值u
c_ref
为2500v。
[0067]
图2是h-mmc电机驱动系统同频运行的综合控制框图,控制方法由补偿相角计算、机侧转速控制、网侧功率控制、桥臂子模块稳压均压控制和调制波计算5个部分构成;
[0068]
所述的补偿相角计算由如下步骤组成:
[0069]
(1)使用编码器实时检测永磁同步电动机转速n,根据n计算电机频率fm:
[0070]fm
=n
×
p/60
[0071]
其中,p为永磁同步电动机极对数,可通过查阅电机说明书得到;
[0072]
(2)实时检测机侧线电压和机侧相电流,分别将检测时刻前23ms内的幅值数据保存至控制器的数据寄存器;
[0073]
(3)根据传感器的采样率s
am
;计算从数据寄存器提取的数据个数nm:
[0074]
nm=s
am
/fm[0075]
其中,s
am
可通过查阅传感器数据手册得到;
[0076]
(4)计算机侧相电压的有效值vm和机侧相电流的有效值im:
[0077][0078][0079]
其中,v
mj
、i
mj
分别是从数据寄存器中提取的机侧线电压和机侧相电流数据;
[0080]
(5)实时检测网侧相电流,并将检测时刻前20ms内的幅值数据保存至控制器的数据寄存器;
[0081]
(6)计算从数据寄存器提取的数据个数ng:
[0082]
ng=s
am
/50
[0083]
(7)计算网侧相电流的有效值ig:
[0084][0085]
其中,i
gj
分别是从数据寄存器中提取的网侧相电流数据;
[0086]
(8)将机侧线电压转化为机侧相电压,网侧线电压转化为网侧相电压,分别将机侧相电压、机侧相电流、网侧相电压、网侧相电流进行锁相环计算得到机侧相电压相角θ
m1
、机侧相电流相角θ
m2
、网侧相电压相角θ
g1
、网侧相电流相角θ
g2
;当θ
m1
=0时,将此刻的机侧相电流相角送入控制器的数据寄存器;当θ
g1
=0时,将此刻的网侧相电流相角送入控制器的数据寄存器;
[0087]
(9)将vm、im、ig、网侧相电压有效值vg、和代入下式计算补偿相角
[0088][0089]
其中,t为控制周期;
[0090]
所述的机侧转速控制由如下步骤组成:
[0091]
(1)通过传统的电机转速双环控制获取机侧d轴电压参考值u
md_ref
和q轴电压参考值u
mq_ref
[0092]
(2)将θ
m1
与相加得到调整后的电机相角θm:
[0093][0094]
(3)使用调整后的电机相角θm对u
md_ref
和u
mq_ref
进行dq/abc变换得到机侧三相电压参考值u
mr_ref
、u
ms_ref
、u
mt_ref
;
[0095]
所述的网侧功率控制由如下步骤组成:
[0096]
(1)检测h-mmc所有子模块电容电压u
c_xy
,计算子模块电容电压平均值u
c_ave
:
[0097][0098]
(2)将子模块电容电压参考值u
c_ref
与u
c_ave
相减,差值送入第三pi控制器,得到网侧d轴电流参考值i
gd_ref
:
[0099]igd_ref
=(u
c_ref-u
c_ave
)
×
(k
p3
k
i3
×
(1/s))
[0100]
其中,k
p3
和k
i3
分别为第三pi控制器的比例系数和积分系数;
[0101]
(3)检测网侧三相电压u
gu
、u
gv
、u
gw
,将其进行abc/αβ变换得到网侧α轴电压u
gα
和网侧β轴电压u
gβ
;
[0102]
(4)令网侧q轴电流参考值i
gq_ref
等于0,将i
gd_ref
、i
gq_ref
进行dq/αβ变换得到网侧α轴电流参考值i
α_ref
和网侧β轴电流参考值i
gβ_ref
;
[0103]
(5)检测网侧三相电流iu、iv、iw,将其进行abc/αβ变换得到网侧α轴电流实际值i
gα
和网侧β轴电流实际值i
gβ
;
[0104]
(6)将i
gα_ref
和i
gα
相减,差值送入第一准pr控制器,第一准pr控制器的输出再与u
gα
相加得到网侧α轴电压参考值u
gα_ref
;将i
gβ_ref
和i
gβ
相减,差值送入第一准pr控制器,第一准pr控制器的输出再与u
β
相加得到网侧β轴电压参考值u
gβ_ref
;
[0105]
(7)将u
gα_ref
和u
gβ_ref
进行αβ/abc变换得到网侧三相电压参考值u
gu_ref
、u
gv_ref
、u
gw_ref
;
[0106]
所述的桥臂子模块稳压均压控制由如下步骤组成:
[0107]
(1)采用通用的层次化电容电压平衡控制得到中性点电压参考值u
st_ref
,采用通用的层次化电容电压平衡控制和环流控制得到桥臂电压参考值叠加量u
cir_ref
;
[0108]
(2)采用通用的子模块均压控制得到桥臂x第y个子模块调制波的叠加量u
xy_add
:
[0109]
所述的调制波计算由如下步骤组成:
[0110]
(1)将u
mr_ref
、u
ms_ref
、u
mt_ref
、u
gu_ref
、u
gv_ref
、u
gw_ref
、u
st_ref
和u
cir_ref
带入下式计算得到各桥臂电压调制波u
x_ref
:
[0111]u1_ref
=u
gw_ref-u
mr_ref-u
st_ref
u
cir_refu2_ref
=u
ms_ref-u
gw_ref
u
st_ref
u
cir_refu3_ref
=u
gu_ref-u
ms_ref-u
st_ref
u
cir_refu4_ref
=u
mt_ref-u
gu_ref
u
st_ref
u
cir_refu5_ref
=u
gv_ref-u
mt_ref-u
st_ref
u
cir_refu6_ref
=u
mr_ref-u
gv_ref
u
st_ref
u
cir_ref
[0112]
(2)将u
x_ref
除以n后和u
xy_add
相加得到桥臂x第y个子模块的调制波u
xy_ref
:
[0113]uxy_ref
=1/n
×ux_ref
u
xy_add
[0114]
(3)对u
xy_ref
采用载波移相调制得到igbt的开关信号。
[0115]
上述步骤中,控制周期t为0.0001s,采样率s
am
为25khz;机侧转速环参数为:k
p1
=1、k
i1
=1.6;机侧电流环参数为:k
p2
=140、k
i2
=290;第三pi控制器参数为:k
p3
=2、k
i3
=20;第一准pr控制器参数为:k
p4
=400、k
sc1
=2000、ω
sc1
=2rad/s;通用的层次化电容电压平衡控制参数为:k
p5
=1、k
i4
=5、k
p6
=8、k
p7
=2.5e-5;环流控制参数为:k
p8
=20、k
i5
=300、k
sc2
=1、ω
sc2
=1rad/s、k
sc3
=1、ω
sc3
=2rad/s;子模块均压控制参数k
p9
=0.02。
[0116]
图3为电机转速波形,整个仿真在0到0.33s时采用传统控制策略使转速逐渐增加,当转速增加到705转/分,频率47hz时,电机频率已接近电网频率,设定频率大于47hz切换为系统同频运行的综合控制方法,经历一段动态调节过程后,转速稳定于额定转速750转/分。为验证同频运行的综合控制方法的有效性,在3.5s时切换为传统控制策略后,转速失稳产生了波动。5s时又切换为系统同频运行的综合控制方法,约1.3s后系统又可恢复稳定状态。
[0117]
图4为桥臂1和桥臂2中各三个子模块电容电压波形,桥臂子模块电容电压在电机频率接近电网频率时逐渐增大,切换同频运行的综合控制方法后,子模块电容电压在同频状态下依然能稳定于额定值。3.5s时由于切换为传统控制策略,子模块电容电压开始失稳,最大值高达3000v,6s时系统切换为同频运行的综合控制方法后,于8.7s逐渐恢复稳定运行状态,且子模块电容电压纹波小于0.6%,证明了本发明的可行性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。