1.本发明涉及保健器械、搬运设备领域,尤其涉及一种楼梯通行技术。
背景技术:
2.低于6层的住宅楼普遍没有配备电梯,想要后期加装电梯,各方利益的协调很困难,在老旧小区生活的住户上下楼很不方便,这种困难对于老年人尤其突出,不仅日常搬运衣物费时费力,下楼散步、聊天、晒太阳更是一种奢望,因此,如何解决老旧小区老年人乘坐轮椅上下楼的困难和无电梯住户的负重上下楼问题,是一个很现实、不可回避的问题。
技术实现要素:
3.本发明针对上述问题,提出了一种楼梯通行技术。
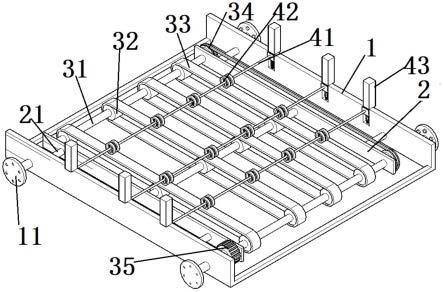
4.本发明所采取的技术方案是:提供一种楼梯通行技术,这种技术能使轮椅、搬运设备等一侧的车轮从单股轨道上行走,因此能通过步行楼梯的台阶,适用于各种坡度的楼梯通行,可作为无电梯老年住户上下楼梯的代步车,也可以作升降小型物件的运输车。如图1所示,本发明公开的一种楼梯通行技术是包括:平衡保护器、溜车保护器、辅助驱动器、可调整姿势座椅、单股轨道等装置的技术组合。
5.对于一般坡度的楼梯,本发明一种楼梯通行技术使用人力推行或车轮的转动,牵引轮椅、搬运设备等上下楼;对于较大坡度的楼梯,本发明则使用辅助驱动器,如:由绞盘、绳索、活动钩头等组成的绳索组件或者包含齿轮的销齿组件、螺旋组件等装置,辅助驱动器借助外挂点能产生很大的牵引力,以牵引轮椅、搬运设备等通行;本发明还具有防止侧翻、防止脱轨、防止向坡底翻滚的平衡保护器和防止溜车的保护器,当路面坡度改变时,配备本发明的轮椅、搬运设备等能调整座椅姿势,做到坐姿舒适,还能改善受力状况,减轻轮椅、搬运设备等向下翻滚的趋势。
6.本发明一种楼梯通行技术的有益效果是:这种技术依靠人力推行、车轮转动或者辅助驱动器的牵引,能够从步行楼梯的台阶上通行,在通过台阶时一般只占用单股轨道,不改变楼梯本身的承载结构,不影响其它住户正常使用楼梯,单股轨道还能对单车推行者提供便利。
附图说明
7.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
8.图1为本发明实施例轮椅与扶梯立柱、横梁、单股轨道关系示意图;
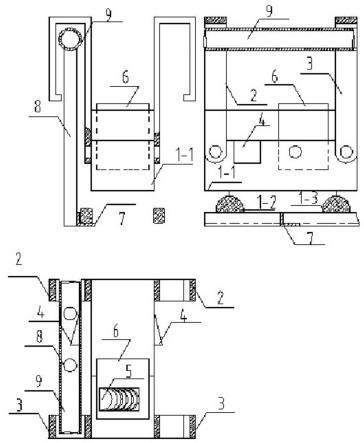
9.图2为本发明实施例横梁式平衡保护器结构及空间布置示意图;
10.图3为本发明实施例楔块式、棘轮式溜车保护器示意图;
11.图4为本发明实施例可调座椅联结及姿势变化示意图;
12.图5为本发明实施例单股轨道结构示意图;
13.图6为本发明实施例辅助驱动器之绳索组件牵引、移动过程示意图;
14.图7为本发明实施例螺旋、销齿、链条、绳索组件等辅助驱动器示意图;
15.图8为本发明实施例侧壁式平衡保护器结构及布置示意图;
16.图9为本发明实施例侧壁式平衡保护器内置溜车保护器结构示意图;
17.图10为本发明实施例侧壁式溜车保护器内置上壳辅助驱动器示意图;
18.图11为本发明实施例侧壁式溜车保护器内置侧面辅助驱动器示意图;
19.图12为本发明实施例顶棚式平衡保护器结构示意图;
20.图13为本发明实施例轮式平衡保护器结构示意图;
具体实施方式
21.下面将对本发明实施例一种楼梯通行技术进行详细的描述,应当明确,所描述的实施例仅仅是本发明的一部分实施例,而不是实施例的全部,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
22.为了便于说明,对本发明一种楼梯通行技术具体实施方式的描述,仅限于以轮椅为例,对搬运设备等其它类似装置不再给予重复说明,同时为了描述方便,如无特殊说明,下文提到的轮椅是指配备本发明-楼梯通行技术的轮椅。
23.参见图1,本发明实施例提供的一种楼梯通行技术是指包括:轮椅本体1(仅作为技术载体)、平衡保护器、溜车保护器4、辅助驱动器5、可调整姿势座椅6、单股轨道7等装置在内的技术组合。
24.轮椅本体1的主要作用是作为本发明楼梯通行技术的承载体,是成熟的常规零部件,在这里不做专门的限定和详细描述,轮椅本体1主要由:车筐1-1、前车轮1-2、后车轮1-3、电池组1-4、控制器1-5、制动电机及减速机1-6等装置组成;车筐1-1通过销轴悬挂了可调整姿势座椅6和2个前平衡保护器2以及2个后平衡保护器3,在车筐1-1的左右两个侧面、位于前后平衡保护器2和3之间安装了2个溜车保护器4,在其内部布置了辅助驱动器5,在车筐1-1的前侧还配备有手动闸1-7等装置;前车轮1-2、后车轮1-3与车筐1-1之间采用普通的直联方式连接,前车轮1-2只起支撑和转向作用,没有驱动能力,后车轮1-3与车筐1-1之间直接联结,后车轮1-3与制动电机及减速机1-6之间采用直联或离合器方式连接;电池组1-4、控制器1-5、制动电机及减速机1-6等组成了轮椅的动力及控制系统,主要用途是:
⑴
平路上行走;
⑵
从单股轨道上下通行;
⑶
楼梯转角处的回转。
25.参见图2,横梁式后平衡保护器3由高度调整板3-1、锁紧钩头3-2、辅助块3-3、摆动式连接块3-4等组成,高度调整板3-1与锁紧钩头3-2依靠螺纹联结,可以调整平衡保护器的高度尺寸以适用于各种不同高度的楼梯护栏;高度调整板3-1与锁紧钩头3-2构成了上下呈狭长型截面,摆动式连接块3-4与车筐1通过销轴联结,横梁式平衡保护器可以前后有限摆动,以适应楼梯护栏的横梁9在水平-倾斜转换时的形状变化;前平衡保护器2、后平衡保护器3与横梁9的接口呈先大后小的喇叭状,逐步过渡后最终由锁紧钩头3-2与辅助块3-3共同拉紧轮椅,使轮椅的支撑力主要集中在与单股轨道7接触的车轮一侧,使另一侧车轮悬空或者与楼梯断续轻接触;锁紧钩头3-2还保证平衡保护器不能从横梁9脱出,轮椅行走至楼梯转角处才能使平衡保护器2、3先后脱离护栏横梁9,在自动驾驶时,锁紧钩头3-2可以围绕高度调整板3-1转动,使轮椅在楼梯转角处能自动回转;横梁式前后平衡保
护器2、3的结构相同,对称安装在轮椅左右两侧,在轮椅的每一侧各自布置2个,即在车筐1-1的前部和后部各配置一个,每次上楼或下楼时均使用靠近单股轨道侧的两个平衡保护器,另一侧的两个平衡保护器在相反方向行走时使用,以左侧轨道为例,上楼时使用左侧的平衡保护器,下楼时则使用右侧的平衡保护器;前平衡保护器2和后平衡保护器3呈倒u型骑在护栏横梁9上,受前平衡保护器2与后平衡保护器3的共同制约,轮椅不会从单股轨道上7侧翻和向下方翻滚,同时受前平衡保护器2、后平衡保护器3、单股轨道7的共同约束,轮椅不会从单股道上7上脱轨。
26.参见图8,侧壁式平衡保护器,需要在楼梯的墙壁上固定铺设槽型截面的滑道10,前后平衡保护器2、3在滑道10的槽型空间内滑动,受到滑道10的约束,轮椅不会从单股轨道7上侧翻、向下翻滚和脱轨;侧壁式平衡保护器滑道10的槽型空间也是楔块式溜车保护器4的安装场所,参见图9,楔块式溜车保护器4向上置于所述滑道10的倒u型槽内,其活动楔形销4-1的楔形截面朝前,当活动楔形销4-1只伸出楔形头部分时,允许轮椅向前方移动,不能后退,当轮椅的移动速度超限,活动楔形销4-1全部伸出,轮椅不能移动,避免发生溜车事故;
27.需要指出的是,如图8所示,槽型截面的滑道10只是简单的示意,其截面形状并不仅限于此,满足侧壁式平衡保护器功能需要的至少还有工字钢、c型钢、钢轨等截面结构,滑道10的具体结构形式并不受以上描述的限制。
28.参见图10,对于大坡度楼梯,在侧壁式平衡保护器的滑道10内置辅助驱动器5(销齿组件的齿轮拨盘),在滑道10的顶部等间距成排开有通孔,孔间距与拨盘5的节距相匹配,拨盘5在旋转过程中与等间距的排孔啮合,以驱动轮椅向前移动;等间距成排通孔也可以开在滑道10的两个侧面,齿轮拨盘5在旋转过程中与滑道10侧面的等间距排孔啮合,以驱动轮椅向前移动,侧面齿轮拨盘的工作原理参见图11所示;
29.参见图10、图11,在侧壁式平衡保护器配套的滑道10的前部开有缺口,该缺口可作辅助驱动器5的外挂点,轮椅也能够借助绳索组件5的牵引上下楼梯。
30.参见图12,顶棚式平衡保护器的配套滑道10安装在楼梯间的顶棚,其工作原理与侧壁式平衡保护器基本相同,这种平衡保护器能弥补侧壁式平衡保护器因条件所限无法在墙壁侧安装的不足,顶棚式平衡保护器2、3的高度尺寸很大,需要结构上加强并能折叠,仅适合侧壁式平衡保护器安装受限的个别楼梯间使用。
31.参见图13,轮式平衡保护器是利用惰轮搭在对面轨道上的一种平衡方式,惰轮在平路上行走时不工作,处于回缩状态,只有需要时才伸出来,起到防止轮椅侧翻、向下翻滚和脱轨的作用,轮式平衡保护器只适合楼梯两侧都铺设轨道的楼梯使用,一侧的单股轨道起驱动作用和主要支撑,另一侧轨道仅通过惰轮起平衡作用和辅助支撑作用,如果需要两侧轨道同时具备驱动能力,惰轮需要增加动力传动系统,轮式平衡保护器无论惰轮有无驱动能力,在使用过程中都会占用全部楼道,影响其他住户通行。
32.参见图3,棘轮式溜车保护器由棘轮、棘轮轴、双止键等组成,在轮椅的左、右侧各配备一个,每次上下楼梯使用靠近护栏侧的溜车保护器,另一个在相反方向行走时使用,溜车保护器的安装位置在前后平衡保护器之间;
33.以右侧轨道为例,轮椅以正常速度向下行走时,溜车保护器的棘轮以顺时针旋转均匀绕过护栏的每根立柱,当轮椅向下行走速度超限即发生溜车事故时,双止键被激活,溜
车保护器的棘轮被卡住,溜车保护器卡在扶手的当前立柱处,轮椅停止向下溜车;如果是左侧轨道,轮椅以正常速度向下行走时,溜车保护器的棘轮以逆时针旋转均匀绕过护栏的每根立柱,当轮椅向下行走速度超限即发生溜车事故时,双止键被激活,溜车保护器的棘轮被卡住,溜车保护器卡在护栏的当前立柱处,轮椅停止向下溜车;
34.轮椅在正常向上行走时,超速的几率很低,如果意外发生了向下、向后的溜车事故时,棘轮式溜车保护器4的棘轮被卡住,溜车保护器被卡在护栏8的当前立柱处,最终轮椅停止向下溜车;
35.参见图3,楔块式溜车保护器,由活动楔形销4-1和壳体4-2组成,其中活动楔形销4-1的前端为楔形截面,轮椅上楼时,活动楔形销4-1只伸出楔形头部分,由于护栏立柱8的存在,此时溜车保护器只允许轮椅向前上方移动,不能后退,避免轮椅发生向后溜车的意外事故;轮椅下楼时,楔块式溜车保护器4允许轮椅以正常速度前进,当轮椅移动的速度超限,参见图3的下半部分,活动楔形销4-1全部伸出,受到护栏立柱8的干涉,轮椅不能向下方移动,避免了轮椅发生向前下方溜车的意外事故。
36.楔块式溜车保护器4的活动楔形销4-1可以手动伸出、缩回,也可以自动伸出、缩回,活动楔形销4-1的自动控制需要测速传感器与轮椅的控制器1-5配合完成,鉴于活动楔形销4-1的详细控制方式和电气接口原理并不影响对本发明楼梯通行技术的理解,这里不作专门的限定和描述;楔块式溜车保护器也可以安装在侧壁式平衡保护器的滑道10内使用,详见图9。
37.楔块式溜车保护器4在辅助驱动器分段牵引时,能起到“锚”固点作用,能在前段牵引结束而次段牵引还没有开始的空挡期间挡住轮椅,使其不会向下方溜车,防止轮椅发生溜车事故。
38.参见图4,可调整姿势座椅悬挂在轮椅的车筐1-1内,当轮椅由平路转为沿斜梯向上行走时,轮椅的车筐6-1会改变倾角,而可调座椅则反方向补偿转动以保持人体大体垂直于地面,当轮椅由斜梯转为平路行走时,车筐也会改变倾角,可调座椅以相反方向补偿转动保持垂直于地面,可调座椅由于反方向的补偿作用有利于减少乘坐者的不适感,并且改善轮椅向坡底翻滚的几率,车筐1-1及座椅姿势的变化参见图4、6所示。座椅角度的调整可以自动进行,电机带动丝杠6-3旋转能够推动或者拉动可调座椅6-1顺时针或者逆时针调整角度;手工转动丝杠6-3可以人为调整座椅角度,适合乘坐者个性设置;将丝杠6-3更换为阻尼弹簧,座椅角度的调整也可以依靠重力和体感微调,座椅的调整功能也能关闭;可调座椅上可以选装安全带,使乘坐者上下楼梯时更加安全、舒适。
39.参见图5,单股(l型、u型、平板型等)轨道7由花纹平面部分7-1和立面突起部分7-2等组成,花纹平面部分7-1的底部与楼梯台阶棱边紧密接触,立面突起部分7-2与楼梯护栏的立柱8固接或与墙壁固接,采用电焊或螺栓连接,轮椅等在单股轨道7上行走时,单股轨道7起支撑作用和为车轮行走提供摩擦作用,每段楼梯可整体铺设或者分段铺设,可以采用焊接、螺纹连接等拼接方式;单股轨道7在楼梯固接成一体,同时起到加固楼梯护栏的作用,单股轨道7还与前平衡保护器2、后平衡保护器3共同约束,使轮椅的车轮不会从单股道7上脱轨;单股轨道7也可以铺设在楼梯的墙壁侧,当轮椅等采用侧壁式平衡保护器、顶棚式平衡保护器时,单股轨道7与楼梯墙壁固接成一体,当轮椅等采用轮式平衡保护器时,单股轨道7可以分别铺设在楼梯墙壁侧和护栏侧。
40.当楼梯倾角很大时,轮椅不再依靠人力推行或者车轮的转动上下台阶,而是采用由辅助驱动器5借助外挂点产生的牵引力,协助轮椅等行走,辅助驱动器5包括:绳索组件或者销齿组件、螺旋组件、履带组件、伸缩缸组件、丝杠组件、链条组件、皮带组件、钢带组件、电推杆组件、直线电机组件等装置,辅助驱动器5可以整段协助轮椅行走或分段协助行走,其中绳索组件5主要由卷筒5-1、钢丝绳5-2、活动钩头5-3等组成,绳索组件5辅助牵引的工作过程参见图5、图6所示,制动电机及减速机1-6驱动卷筒5-1旋转,将钢丝绳5-2末端的活动钩头5-3挂搭在楼梯扶手的立柱8、侧壁式或者顶棚式平衡保护器4配套的滑道10的前部缺口上或者其它可连接物件上,随着卷筒5-1的旋转释放出或者收回钢丝绳5-2,轮椅等就沿着单股轨道7被拉上或者放下,完成上下楼梯的牵引任务,绳索组件5牵引适用于各种结构的楼梯,应用最为普遍;
41.参见图7,螺旋组件牵引是将螺旋与楼梯护栏的立柱8相啮合的牵引方式,对于个别老旧楼梯适合,一般采用2副螺旋,前螺旋先进入牵引,然后2副螺旋共同牵引,到达平台时,前螺旋脱离,最终2个螺旋全部脱离牵引,螺旋在制动状态时能防止轮椅向坡底溜车,此组件牵引适用于立柱分布均匀、牢固的护栏;
42.参见图7,销齿组件牵引是将带开放辐条的齿轮拨盘5与楼梯护栏的立柱8相啮合的牵引方式,采用2副销齿组件施行牵引,前拨盘先进入牵引,然后2副销齿组件共同牵引,到达平台时,前拨盘先脱离接触,最终2副销齿组件全部脱离接触,拨盘在制动状态时能防止轮椅向坡底溜车,前拨盘向前伸出,后拨盘也向前伸出,此组件牵引适用于立柱分布均匀、牢固的护栏;
43.参见图7,履带组件牵引是将履带5与楼梯护栏的立柱8相啮合的牵引方式,采用2副履带施行牵引,前履带先进入牵引,然后副套履带共同牵引,到达平台时,前履带先脱离接触,最终2副履带组件全部脱离接触,履带制动状态时能防止轮椅向坡底溜车,前履带朝前伸出,后履带也朝前伸出,此组件牵引适用于立柱分布均匀、牢固的护栏;
44.伸缩缸装置牵引一般采用双伸缩缸体或者分2段进行,以完成轮椅的上下楼辅助牵引,多数情况使用气缸用作辅助牵引的动力源;也可以采用其它辅助驱动器,如:链条、皮带、钢带、电推杆、直线电机等组件协助轮椅上下楼梯,一般最多分2段协助牵引,工作原理以此类推,不再一一加以详细描述。
45.对于一般坡度的楼梯,依靠车轮的转动就可以将轮椅向上移动至最顶层,以位于楼梯左侧的单股轨道为例,单股轨道7铺设在楼梯左侧,轮椅采用横梁式平衡保护器,参见图1、图5,轮椅位于底层楼梯处,其前方正对楼梯左侧并紧靠楼梯台阶外沿,轮椅的左前轮1-2、左后轮1-3对准单股轨道7的平面部分7-1(单股轨道7的结构详见图5),同时将左前侧平衡保护器2挂在左侧的护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9(横梁式平衡保护器结构详见图2右边部分),轮椅向前行走并随后仰起,当轮椅全部进入楼梯倾斜段时,左后侧平衡保护器3自动挂在左侧的横梁9上,轮椅继续向上行走,当轮椅前半部分进入1~2层楼梯平台时,左前侧防平衡保护器2脱离横梁9,当轮椅全部进入1~2层楼梯的平台时,左后侧平衡保护器3脱离横梁9,轮椅停止行走,轮椅等在楼梯上各阶段的姿态变化详见图6;
46.再将轮椅摆正,将其左前车轮1-2、左后车轮1-3正对单股轨道7的平面部分7-1,并靠近左侧楼梯台阶最外沿,将左前侧平衡保护器2挂在左侧的护栏横梁9上,并将前平
衡保护器2的锁紧钩头2-2锁住横梁9,轮椅向前行走并随后仰起,当轮椅全部进入楼梯倾斜段时,左后侧平衡保护器3自动挂在左侧的楼梯护栏横梁9上,轮椅继续向上行走,当轮椅前半部分进入2楼的楼梯平台时,左前侧平衡保护器2脱离护栏的横梁9,当轮椅全部进入2层楼梯的平台时,左后侧平衡保护器3脱离横梁9,轮椅停止行走;
47.此时,轮椅位于2层平台处,重复以上步骤,轮椅等可向上移动至3、4、5层并最终到达楼梯的6层平台处;
48.轮椅在向上移动时,在棘轮式溜车保护器或者楔块式溜车保护器4的保护下,不会发生向后溜车的意外事故。
49.对于一般坡度的楼梯,轮椅依靠车轮的转动可以从6层平台向下移动至1楼,轮椅位于6层楼梯处,单股轨道7铺设在楼梯左侧,参见图1、图5,轮椅前方正对楼梯左侧并紧靠楼梯台阶最外沿,轮椅的左前轮1-2、左后轮1-3对准单股轨道7的平面部分7-1,同时将左前侧平衡保护器2挂在左侧的护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,轮椅向前行走并随后向坡底俯倾,当轮椅全部进入楼梯倾斜段时左后侧平衡保护器3自动挂在左侧的护栏横梁9上,轮椅继续向坡底行走,当轮椅前半部分进入5~6层楼梯平台时,左前侧平衡保护器2脱离横梁9,当轮椅全部进入5~6层楼梯的平台时,左后侧平衡保护器3脱离护栏横梁9,轮椅停止行走;
50.再将轮椅摆正,将其左前车轮1-2、左后车轮1-3正对单股轨道的花纹平面部分7-1并靠近左侧楼梯台阶最外沿,将将左前侧平衡保护器2挂在左侧的护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,轮椅向前行走并随后向下俯倾,当轮椅全部进入楼梯倾斜段时,左后侧平衡保护器3自动挂在左侧的护栏横梁9上,轮椅继续向坡底行走,当轮椅前半部分进入楼梯5层平台时,左前侧平衡保护器3脱离楼梯护栏的横梁9,当轮椅全部进入5层楼梯的平台时,左后侧平衡保护器3脱离护栏横梁9,轮椅停止行走;
51.此时,轮椅位于5层平台处,重复以上步骤,轮椅即可向下移动至4、3、2楼层并最终到达底楼;
52.轮椅在向下移动时,在棘轮式溜车保护器和楔块式溜车保护器4的保护下,不会发生溜车事故。
53.对于楼梯右侧通行,需将单股轨道7铺设在楼梯右侧,轮椅等上下楼时,只需将轮椅的前方正对楼梯右侧并紧靠楼梯台阶最外沿,轮椅的右前轮1-2、右后轮1-3对准单股轨道7的平面部分7-1,同时将右前侧平衡保护器2挂在右侧的护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,其余过程与左侧上、下楼通行类似,轮椅一直围绕着右侧横梁9、右侧立柱8上下移动、回转、俯仰,同时溜车保护器4提供溜车保护,轮椅依靠车轮转动即可完成右侧轨道的上下楼行走。
54.对于较大坡度楼梯的上下楼,轮胎可采用加大轴向宽度、定制花纹和单股轨道7采用花纹钢板等方式来增加摩擦,提高轮椅等的爬坡能力;
55.对于大坡度楼梯,轮椅可以借助辅助驱动器5的牵引上楼,以绳索组件5和左侧横梁式平衡保护器为例,轮椅位于1层楼梯处,参见图1,将轮椅摆正,将其左前车轮1-2、左后车轮1-3正对单股轨道7的平面7-1部分并靠近楼梯台阶最外沿,将左前平衡保护器2挂在左侧的护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,将绳索5-2拉出足够距离的长度,绳索末端的活动钩头5-3勾住1~2层平台回转处的立柱8、横梁9,或者侧壁式
平衡保护器的滑道10的缺口以及其它可利用之物等,卷筒5-1转动回卷绳索5-2,轮椅向前行走并随后仰起,当轮椅全部进入楼梯倾斜段时左后侧平衡保护器3自动挂在左侧的护栏横梁9上,电动轮椅继续向前行走,当轮椅前半部分进入楼梯平台段时,左前平衡保护器2脱离护栏横梁9,当轮椅全部进入1~2层楼梯的平台段时,左后平衡保护器3脱离护栏横梁9,卷筒5-1停止缠绕,轮椅停止移动;
56.然后将轮椅回转并再次摆正,将其左前车轮1-2、左后车轮1-3正对单股轨道7的平面部分7-1并靠近楼梯台阶最外沿,将左前侧平衡保护器2挂在左侧的护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,将绳索5-2拉出足够距离的长度,并将绳索末端的活动钩头5-3勾住2层平台回转处的立柱8,或横梁9、侧壁式平衡保护器的滑道10缺口以及其它可利用之物,卷筒5-1转动回卷绳索5-2,轮椅向前行走并随后仰起,当轮椅全部进入楼梯倾斜段时,左后侧平衡保护器3自动挂在左侧的护栏横梁9上,轮椅继续向上行走,当轮椅前半部分进入2层楼梯平台段时,左前平衡保护器2脱离护栏横梁9,当轮椅全部进入2层楼梯的平台段时,左后平衡保护器3脱离护栏横梁9,卷筒5-1停止缠绕,轮椅停止移动;
57.此时,轮椅等位于2层平台处,重复以上步骤,轮椅即可向上移动至3、4、5层并最终到达6层平台;
58.轮椅在向上移动时,在棘轮式溜车保护器或者楔块式溜车保护器4的保护下,不会发生向后溜车的意外事故。
59.对于大坡度楼梯,轮椅等也可以使用辅助驱动器5(以绳索组件5为例)协助下楼,轮椅位于6层楼梯处,详见图6所示,左侧为楼梯护栏,单股轨道7铺设在楼梯左侧护栏处,轮椅等采用横梁式平衡保护器,将轮椅等摆正,将其左前车轮1-2、左后车轮1-3正对单股轨道7的花纹平面部分7-1并靠近楼梯台阶最外沿,将左前平衡保护器2挂在左侧护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,将绳索5-2拉出足够距离的长度,绳索末端的活动钩头5-3勾住6层平台回转处的立柱8,或横梁9、侧壁式平衡保护器的滑道10缺口以及其它可利用之物等,绞盘5-1转动松开绳索5-2,轮椅向前行走并随后向下俯倾,当轮椅全部进入楼梯倾斜段时左后平衡保护器3自动挂在左侧的护栏横梁9上,轮椅继续向下行走,当轮椅前半部分进入5~6层楼梯平台时,左前平衡保护器2脱离护栏横梁9,当轮椅全部进入5~6层楼梯的平台时,左后平衡保护器3脱离护栏横梁9,卷筒5-1停止转动,轮椅停止行走,此时,轮椅等位于6~5层楼梯平台处;
60.然后将轮椅回转并再次摆正,将其左前车轮1-2、左后车轮1-3正对单股轨道的平面7-1部分并靠近楼梯台阶最外沿,将左前平衡保护器2挂在左侧护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,将绳索5-2拉出足够距离的长度,并将绳索末端的活动钩头5-3勾住5~6层平台回转处的立柱8、侧壁式平衡保护器的滑道10的缺口以及其它可利用之物等,卷筒5-1转动松开绳索5-2,轮椅向前行走并随后向下俯倾,当轮椅全部进入楼梯倾斜段时左后侧平衡保护器3自动挂在左侧的护栏横梁9上,轮椅继续向下行走,当轮椅前半部分进入5层楼梯平台时左前平衡保护器2脱离护栏横梁9,当轮椅全部进入5层楼梯的平台时,左后平衡保护器3脱离护栏的横梁9,卷筒5-1停止转动,轮椅停止行走;
61.此时,轮椅位于5层楼梯平台处,重复以上步骤,轮椅即可向下移动至4、3、2楼层并最终到达底楼;
62.轮椅在向下移动时,在棘轮式溜车保护器或者楔块式溜车保护器4的保护下,不会发生溜车事故。
63.当位于楼梯右侧通行时,轮椅采用辅助驱动器5上下楼,将轮椅的右前轮1-2、右后轮1-3对准位于楼梯右侧的单股轨道7的平面部分7-1,同时将右前平衡保护器2挂在右侧的楼梯护栏横梁9上,并将前平衡保护器2的锁紧钩头2-2锁住横梁9,其余过程与左侧通行类似,轮椅一直围绕着右侧横梁、右侧立柱8上下移动、回转、俯仰,溜车保护器4与左侧通行的保护动作类似。
64.以上所描述的轮椅上下楼梯过程,包括:人力推行、车轮转动、辅助驱动器牵引在内,无论左侧还是右侧通行,都是以横梁式平衡保护器为例加以说明的,对于侧壁式平衡保护器,溜车保护器4和辅助驱动器5均会有所不同,参见图8,侧壁式平衡保护器的配套滑道10的槽型空间也是楔块式溜车保护器4、辅助驱动器的销齿组件的齿轮拨盘5的安装场所,在滑道10的顶部或侧面等间距成排开有通孔,孔间距与齿轮拨盘5的节距相匹配,齿轮拨盘5在旋转过程中与等间距排孔啮合,驱动轮椅向前移动,参见图10、图11;在滑道10的前端开有缺口,该缺口可作辅助驱动器的绳索组件5的外挂点,轮椅还可以选择采用绳索组件5的协助上下楼梯;
65.当轮椅使用侧壁式、顶棚式平衡保护器时,需要将平衡保护器2、3插入墙壁上的滑道10的槽内,轮椅使用轮式平衡保护器时,需要将惰轮伸出并搭在对向的单股轨道上,并且将轮椅的前轮1-2、后轮1-3对准单股轨道7的平面部分7-1,然后轮椅便依附墙壁或护栏上下移动、回转、俯仰,轮椅最终移动并到达底楼或顶楼。
66.轮椅在上下楼梯时,每段斜梯可以使用绳索组件5一次完成牵引,也可以分数次完成,期间可以借助轻质伸缩杆向前伸出完成对活动钩头5-3的摘挂钩动作,还可以配置能自动行走的机构配合绳索组件5完成活动钩头5-3摘挂钩,以减少人工往返走动。
67.辅助驱动器5还包括:销齿组件、螺旋组件、履带组件或者伸缩缸组件、丝杠组件、链条组件、皮带组件、钢带组件、电推杆组件、直线电机组件等装置,辅助驱动器5借助外挂点能产生很大的牵引力,协助轮椅上下台阶,辅助驱动器牵引方式适合大坡度楼梯的通行。
68.应当指出,在辅助驱动器5分2段牵引时,楔块式溜车保护器4还能起到承上启下的“锚”固点作用,当轮椅处于首段牵引结束而次段牵引还没有开始的空档期挡住轮椅,使其不能移动,防止轮椅向坡底溜车;制动电机在刹车状态能防止拨盘5转动,侧壁式平衡保护器与齿轮拨盘组件5配套使用时,也能起到上述作用。
69.在下楼过程中,制动电机的机械制动器只起到定位停车作用,一般不参与调速控制,紧急情况下,可以使用轮椅的手动刹车装置制止溜车事故。
70.无论是依靠车轮的转动,还是辅助驱动器5的协助上下楼,前平衡保护器2、后平衡保护器3、单股轨道7共同约束,保护轮椅不会从单股轨道7上侧面翻倒、向坡底翻滚和脱轨。
71.本发明一种楼梯通行技术能够沿倾斜楼梯上下行走和一般道路水平行走,轮椅等可选配:无辅助驱动器的人力推行式、有辅助驱动器的人力推行式、无辅助驱动器的电动式、有辅助驱动器的电动式、无辅助驱动器的全自动驾驶式、有辅助驱动器的全自动驾驶式等类型。
72.以上所述,仅为本发明一种楼梯通行技术的具体实施方式,但本发明的保护范围并不局限于以上描述,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻
易想到变化或替换,因此都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。