1.本实用新型涉及侦查机器人领域,特别是涉及一种侦查机器人的驱动装置。
背景技术:
2.由于化学危险品及放射性物质泄漏、燃烧等事故的发生,以及一些火灾、地震等灾难救援环境下,救援人员若贸然进入此类场所,危险性较大,人身安全无法保障,侦察机器人能够代替救援人员进入危险环境,具有良好的应用前景,现有的侦查机器人通常采用履带进行驱动,可参见中国发明专利cn110920765a中提出的一种轻型履带式侦察机器人。
3.在一些空间狭窄的环境中,往往需要应用小型化、轻量化的侦察机器人,而对履带式侦察机器人而言,其驱动装置的复杂程度直接影响其体积大小,因此亟需提出一种结构精简的侦察机器人的驱动装置。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供一种结构简单、空间占用小的侦查机器人的驱动装置。
5.本实用新型提供一种侦查机器人的驱动装置,应用于侦察机器人的本体,包括行进机构、摆臂机构以及动力机构,所述行进机构设置于所述本体的左右两侧,且与所述摆臂机构连接,所述行进机构包括第一环形链带,所述摆臂机构包括第二环形链带,所述动力机构包括动力主轴和动力副轴,所述第一环形链带与所述第二环形链带通过所述动力主轴实现同轴连接,所述动力主轴用于驱动所述第一环形链带与所述第二环形链带做循环运动,以实现所述本体的行进,所述动力副轴装设于所述动力主轴内,且与所述动力主轴同轴设置,所述动力副轴与所述摆臂机构连接,用于驱动所述摆臂机构相对于所述本体摆动,以实现所述本体的升降。
6.在一实施例中,所述动力主轴上套设有第一驱动轮和第二驱动轮,所述第一驱动轮与所述第一环形链带啮合,所述第二驱动轮与所述第二环形链带啮合,所述动力主轴带动所述第一驱动轮和所述第二驱动轮转动。
7.在一实施例中,所述行进机构包括第一安装板,所述第一安装板设置于所述第一环形链带的外侧,所述动力主轴装设于所述第一安装板上,且与所述第一安装板可转动连接。
8.在一实施例中,所述行进机构还包括从动轮,所述从动轮沿其自身轴向可转动的装设于所述第一安装板上,且与所述第一环形链带啮合。
9.在一实施例中,位于所述本体左右两侧的所述行进机构的所述从动轮之间通过连接轴连接。
10.在一实施例中,所述摆臂机构包括第二安装板,所述第二安装板设置于所述第二环形链带的外侧,所述动力副轴装设于所述第二安装板上,且与所述第二安装板固定连接。
11.在一实施例中,所述摆臂机构还包括副转轮,所述副转轮沿其自身轴向可转动的
装设于所述第二安装板上,且与所述第二环形链带啮合。
12.在一实施例中,位于所述本体左右两侧的所述摆臂机构通过所述动力副轴连接,所述动力副轴驱动所述摆臂机构同步运动。
13.在一实施例中,所述动力副轴设置为两个,且同轴设置,两个所述动力副轴分别与位于所述本体左右两侧的所述摆臂机构连接。
14.在一实施例中,所述动力主轴设置为两个,且同轴设置,两个所述动力主轴分别与位于所述本体左右两侧的所述行进机构连接。
15.本实用新型的有益效果在于:
16.通过设置动力机构,动力机构包括动力主轴以及装设在动力主轴内部的动力副轴,如此设置,使得行进机构的动力主轴以及摆臂机构的动力副轴同轴设置,能够减小动力机构的空间占用,有利于本体的小型化设计,通过动力主轴驱动第一环形链带和第二环形链带同步运动,当本体行进时,摆臂机构可旋转至水平位置,在第一环形链带和第二环形链带的共同作用下实现本体的行进,能够极大地提升本体行进过程中的稳定性;通过动力副轴驱动摆臂机构相对于本体摆动,以实现本体的升降,确保本体的避障、翻越障碍物的能力。
附图说明
17.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
18.图1为本实用新型一实施例的本体的局部结构示意图;
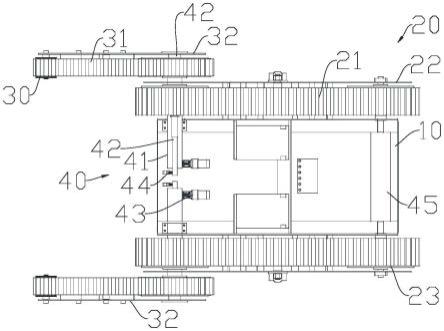
19.图2为本实用新型一实施例的本体的俯视图;
20.图3为本实用新型一实施例的动力机构的示意图。
21.图中:
22.10-本体;20-行进机构;21-第一环形链带;22-第一安装板;23-从动轮;30-摆臂机构;31-第二环形链带;32-第二安装板;33-副转轮;40-动力机构;41-动力主轴;411-第一驱动轮;412-第二驱动轮;42-动力副轴;43-第一电机;44-第二电机;45-连接轴。
具体实施方式
23.下面将结合附图,对本实用新型的特定实施例进行详细描述。显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型的描述,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.在本实用新型的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语的具体含义。
25.术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”等指示的方位或位
置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.术语“第一”、“第二”、“第三”等仅仅是为了区别属性类似的元件,而不是指示或暗示相对的重要性或者特定的顺序。
27.术语“包括”、“包含”或者其任何其他变体,意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
28.如附图1和附图2所示,本实用新型提出的侦查机器人的驱动装置应用于侦察机器人的本体10,包括行进机构20、摆臂机构30以及动力机构40,行进机构20设置于本体10的左右两侧,摆臂机构30设置于本体10的左右两侧,且与行进机构20连接,摆臂机构30相对于本体10及行进机构20可转动,行进机构20被配置为用于配合本体10实现前进、后退、转向等行进动作,摆臂机构30被配置为通过摆动用于配合本体10实现升降,以使本体10能够越过障碍物,动力机构40用于驱动行进机构20和摆臂机构30。
29.行进机构20包括第一环形链带21,摆臂机构30包括第二环形链带31,动力机构40包括动力主轴41以及动力副轴42,第一环形链带21和第二环形链带31通过动力主轴41实现同轴连接,动力主轴41用于驱动第一环形链带21和第二环形链带31做循环运动,以实现本体的行进,动力主轴41上套设有第一驱动轮411和第二驱动轮412,第一驱动轮411与第一环形链带21啮合,第二驱动轮412与第二环形链带31啮合,动力主轴41驱动第一驱动轮411和第二驱动轮412同步转动,进而带动第一环形链带21和第二环形链带31做循环运动,以实现本体10的行进,动力副轴42装设于动力主轴41内,动力副轴42与摆臂机构30连接,用于驱动摆臂机构30相对于本体10摆动,以实现本体10的升降。
30.在本实施例的一个示例中,结合附图2和附图3,附图2为本体10的俯视图,为便于理解动力机构40的结构,在附图2中做了处理,位于本体10右侧(即附图2中本体10的上侧)的动力机构40以剖视图的形式展示,以便于理解动力主轴41与动力副轴42之间的位置关系,位于本体10左侧(即附图2中本体10的下侧)的动力机构40以俯视图的形式展示,动力主轴41和动力副轴42之间通过轴承连接,使得动力主轴41与动力副轴42之间能够独立运动,动力主轴41通过轴承装设于本体10上,以实现动力主轴41相对于本体10的转动,动力主轴41由第一电机43驱动,沿其自身轴向做旋转运动,动力副轴42由第二电机44驱动,并沿其自身轴向做旋转运动。
31.在本实施例的一个示例中,结合附图2和附图3,行进机构20包括第一安装板22,第一安装板22设置在第一环形链带21的外侧,第一环形链带21的外侧定义为,其沿第一驱动轮411的轴向远离本体10的一侧,第一安装板22用于装设动力主轴41,且动力主轴41与第一安装板22可旋转连接,第一电机43驱动动力主轴41相对于第一安装板22转动。
32.结合附图2和附图3,摆臂机构30包括第二安装板32,第二安装板32设置在第二环形链带31的外侧,第二环形链带22的外侧定位为,其沿第二驱动轮412的轴向远离本体10的一侧,第二安装板32用于装设动力副轴42,且动力副轴42与第二安装板32固定连接,第二电机44驱动动力副轴42转动,进而带动第二安装板32共同转动,以实现摆臂机构30的转动,当摆臂机构30以动力副轴42为中心摆动时,随着摆动角度的变化,本体10会在摆臂机构30的作用下抬起或落下。
33.在本实施例的一个示例中,如附图3所示,动力主轴41与第二安装板32可转动连接,动力主轴41相对于第二安装板32可转动,动力主轴41与第二安装板32靠近第二环形链带31的一端可转动连接,动力副轴42与第二安装板32远离第二环形链带31的一端固定连接,第二安装板32靠近第二环形链带31的一端定义为其沿动力主轴41的轴向靠近主体10的一端,第二安装板32远离第二环形链带31的一端定义为其沿动力主轴41的轴向远离主体10的一端。
34.如附图2所示,行进机构20还包括从动轮23,从动轮23可转动的装设于第一安装板22上,且与第一环形链带21啮合,从动轮23在第一安装板22上可沿自身轴向转动,当动力主轴41带动第一驱动轮411转动进而带动第一环形链带21循环运动时,从动轮23在第一环形链带21的带动下转动,确保第一环形链带21运动的稳定性。
35.在本实施例的一个示例中,位于本体10左右两侧的行进机构20的从动轮23之间通过一连接轴45连接,能够确保本体10左右两侧的行进机构20之间的运动同步,提升本体10行进的稳定性。
36.在本实施例的一个示例中,结合附图2和附图3,位于本体10左右两侧的摆臂机构30通过动力副轴42连接,更具体地说,动力副轴42的两侧端部固定装设于本体10左右两侧的第二安装板32上,使得本体10左右两侧的摆臂机构30同步运动,确保翻越障碍物的过程中本体10稳定性好,减少本体10的晃动及侧倾。
37.由于本体10通常在行进过程中要进行转弯动作,因此,在本实施例的一个示例中,如附图3所示,位于本体10左右两侧的行进机构20分别由两个不同的动力主轴41驱动,两个动力主轴41同轴设置,且通过独立的第一电机43驱动,使得位于本体10左右两侧的行进机构20可以具有不同的运动速度,以便于实现本体10的转弯动作。
38.可以理解的,为保证动力主轴41的安装,本体10内部设有轴座,动力主轴41的端部可设置在轴座上。
39.在本实施例的另一示例中,位于本体10左右两侧的摆臂机构30由两个不同的动力副轴42驱动,两个动力副轴42同轴驱动,且通过独立的第二电机44驱动,位于本体10左右两侧的摆臂机构30可以具有不同的运动速度,通过摆臂机构30的不同运动速度实现本体10的转弯动作。
40.可以理解的,为保证动力副轴42的安装,本体10内部设有轴座,动力副轴42的端部可设置在轴座上。
41.如附图1所示,摆臂机构30还包括副转轮33,副转轮33可转动的装设于第二安装板32上,且与第二环形链带31啮合,当动力主轴41带动第二驱动轮412转动进而带动第二环形链带31循环运动时,副转轮33在第二环形链带31的带动下转动,以确保第二环形链带31的运动稳定顺畅。
42.综上所述,通过设置动力机构40,动力机构40包括动力主轴41以及装设在动力主轴41内部的动力副轴42,如此设置,使得行进机构20的动力主轴41以及摆臂机构30的动力副轴42同轴设置,能够减小动力机构40的空间占用,有利于本体10的小型化设计,通过动力主轴41驱动第一环形链带21和第二环形链带31同步运动,当本体10行进时,摆臂机构30可旋转至水平位置,在第一环形链带21和第二环形链带31的共同作用下实现本体10的行进,能够极大地提升本体10行进过程中的稳定性;通过动力副轴42驱动摆臂机构30相对于本体
10摆动,以实现本体10的升降,确保本体10的避障、翻越障碍物的能力。
43.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所附的权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。