1.本技术实施例涉及桥梁检修领域,具体涉及一种双轨攀爬机构。
背景技术:
2.为消除重大事故隐患,悬索桥主缆需要定期检修。人力检修主缆效率低且风险大,因而实现机器对主缆的检修成为新的趋势。现有的主缆检测机器人一般以主缆扶手绳为轨道进行攀爬。由于不同悬索桥的主缆直径存在差异,导致相互平行布置的2根扶手绳之间的间距存在差异,而现有的主缆检测机器人不能调节自身宽度,不能适应双轨间距的变化。
技术实现要素:
3.本技术实施例提供了一种双轨攀爬机构,用于提高双轨攀爬机构对不同轨道宽度的适应能力。
4.本技术实施例第一方面提供了一种双轨攀爬机构,包括:第一轨道配合部、第二轨道配合部、中间连接部和变间距调节部;
5.第一轨道配合部和第二轨道配合部滑动安装在中间连接部的两侧,变间距调节部连接第一轨道配合部和第二轨道配合部,在变间距调节部的驱动下,第一轨道配合部和第二轨道配合部相对中间连接部滑动,第一轨道配合部和第二轨道配合部沿轨道宽度方向相互靠近或远离;
6.第一轨道配合部和第二轨道配合部分别在两条轨道上运动,使得双轨攀爬机构沿轨道延伸方向运动。
7.基于本技术实施例第一方面,本技术实施例第一方面的第一种实现方式中,中间连接部的前侧面和后侧面设置有变间距滑块;
8.第一轨道配合部和第二轨道配合部设置有向内突出部,向内突出部的内侧面设置有变间距滑轨;
9.变间距滑块和变间距滑轨滑动配合。
10.基于本技术实施例第一方面或第一方面的第一种实现方式,本技术实施例第一方面的第二种实现方式中,变间距调节部包括电动缸和连杆机构,连杆机构的末端铰接第一轨道配合部和第二轨道配合部,电动缸安装在中间连接部,电动缸推动连杆机构伸缩,使得第一轨道配合部和第二轨道配合部相对运动。
11.基于本技术实施例第一方面、第一方面的第一种实现方式和第二种实现方式任一种,本技术实施例第一方面的第三种实现方式中,第一轨道配合部和第二轨道配合部设置有爬行轮,第一轨道配合部和第二轨道配合部通过爬行轮在轨道上运动。
12.基于本技术实施例第一方面、第一方面的第一种实现方式至第三种实现方式任一种,本技术实施例第一方面的第四种实现方式中,第一轨道配合部包括第一上轨道配合部和第一下轨道配合部,第一上轨道配合部和第一下轨道配合部滑动连接,第一上轨道配合部和第一下轨道配合部在行进电机的驱动下,沿轨道延伸方向相对运动;
13.第二轨道配合部包括第二上轨道配合部和第二下轨道配合部,第二上轨道配合部和第二下轨道配合部滑动连接,第二上轨道配合部和第二下轨道配合部在行进电机的驱动下,沿轨道延伸方向相对运动。
14.基于本技术实施例第一方面、第一方面的第一种实现方式至第四种实现方式任一种,本技术实施例第一方面的第五种实现方式中,第一下轨道配合部的上表面固定设置有行进滑块,第一上轨道配合部的下表面固定设置有行进滑轨,行进滑块和行进滑轨滑动配合;
15.第二下轨道配合部的上表面固定设置有行进滑块,第二上轨道配合部的下表面固定设置有行进滑轨,行进滑块和行进滑轨滑动配合。
16.基于本技术实施例第一方面、第一方面的第一种实现方式至第五种实现方式任一种,本技术实施例第一方面的第六种实现方式中,第一轨道配合部和第二轨道配合部包括夹爪,夹爪用于夹紧或松开轨道,以使得双轨攀爬机构能够在轨道上蠕动前进。
17.基于本技术实施例第一方面、第一方面的第一种实现方式至第六种实现方式任一种,本技术实施例第一方面的第七种实现方式中,第一上轨道配合部在轨道延伸方向上的长度大于第一下轨道配合部;
18.第二上轨道配合部在轨道延伸方向上的长度大于第二下轨道配合部。
19.基于本技术实施例第一方面、第一方面的第一种实现方式至第七种实现方式任一种,本技术实施例第一方面的第八种实现方式中,行进电机固定安装在第一下轨道配合部,行进电机通过齿轮和齿条驱动第一上轨道配合部和第一下轨道配合部相对运动,齿条固定安装在第一上轨道配合部,齿轮安装在行进电机的输出端;
20.行进电机固定安装在第二下轨道配合部,行进电机通过齿轮和齿条驱动第二上轨道配合部和第二下轨道配合部相对运动,齿条固定安装在第二上轨道配合部,齿轮安装在行进电机的输出端。
21.基于本技术实施例第一方面、第一方面的第一种实现方式至第八种实现方式任一种,本技术实施例第一方面的第九种实现方式中,中间连接部包括第一中间连接部和第二中间连接部;
22.第一中间连接部通过变间距滑块和变间距滑轨连接第一上轨道配合部和第二上轨道配合部;
23.第二中间连接部通过变间距滑块和变间距滑轨连接第一下轨道配合部和第二下轨道配合部。
24.基于本技术实施例第一方面、第一方面的第一种实现方式至第九种实现方式任一种,本技术实施例第一方面的第十种实现方式中,变间距调节部包括第一变间距调节部和第二变间距调节部;
25.第一变间距调节部连接第一中间连接部、第一上轨道配合部和第二上轨道配合部,第一变间距调节部用于驱动第一上轨道配合部和第二上轨道配合部相对第一中间连接部滑动;
26.第二变间距调节部连接第二中间连接部、第一下轨道配合部和第二下轨道配合部,第二变间距调节部用于驱动第一下轨道配合部和第二下轨道配合部相对第二中间连接部滑动。
27.从以上技术方案可以看出,本技术实施例具有以下优点:
28.本技术实施例中,双轨攀爬机构以中间连接部为中心,在两侧滑动安装第一轨道配合部和第二轨道配合部,使得第一轨道配合部和第二轨道配合部可以相对中间连接部滑动,改变双轨攀爬机构的宽度以适应轨道宽度。设置变间距调节部以驱动第一轨道配合部和第二轨道配合部,使得第一轨道配合部和第二轨道配合部的距离能够实现精密调节,并在调节到指定位置后,保持第一轨道配合部和第二轨道配合部在轨道宽度方向的距离。
附图说明
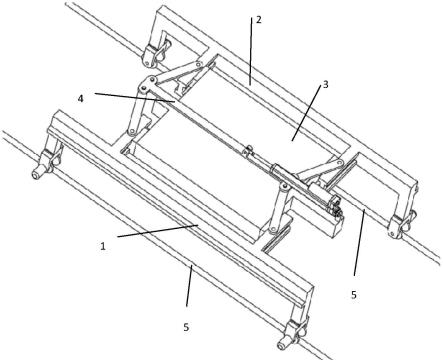
29.图1是本技术实施例1的双轨攀爬机构的整体示意图;
30.图2是本技术实施例1的双轨攀爬机构的轨道配合部立体视图;
31.图3是本技术实施例的双轨攀爬机构的中间连接部立体视图;
32.图4是本技术实施例的双轨攀爬机构的变间距调节部立体视图;
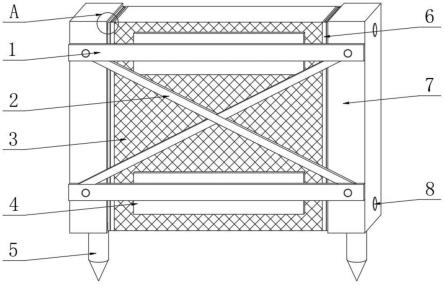
33.图5是本技术实施例2的双轨攀爬机构一种方案的整体示意图;
34.图6是本技术实施例2的双轨攀爬机构的轨道配合部立体视图;
35.图7是本技术实施例2的双轨攀爬机构另一种方案的整体示意图;
36.图8是本技术实施例2的双轨攀爬机构另一种方案的整体示意图;
37.图9是本技术实施例2的双轨攀爬机构另一种方案的整体示意图;
38.附图标记:
39.1-第一轨道配合部;101-第一上轨道配合部;102-第一下轨道配合部;2-第二轨道配合部;201-第二上轨道配合部;202-第二下轨道配合部;3-中间连接部;301-第一中间连接部;302-第二中间连接部;4-变间距调节部;401-第一变间距调节部;402-第二变间距调节部;5-轨道;6-变间距滑轨;7-变间距滑块;701-第一变间距滑块;702-第二变间距滑块;703-第三变间距滑块;704-第四变间距滑块;8-爬行轮;9-连杆机构;901-第一连杆;902-第二连杆;903-第三连杆;904-第四连杆;905-第五连杆;10-连接基座;11-电动缸;12-行进电机;13-行进滑块;14-行进滑轨;15-齿轮;16-齿条;17-夹爪。
具体实施方式
40.本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
41.如图1至图9所示,本技术实施例提供了一种双轨攀爬机构,包括:第一轨道配合部1、第二轨道配合部2、中间连接部3和变间距调节部4。轨道配合部分为第一轨道配合部1和第二轨道配合部2,也可以称为左轨道配合部和右轨道配合部。
42.第一轨道配合部1和第二轨道配合部2滑动安装在中间连接部3的两侧,变间距调节部4连接第一轨道配合部1和第二轨道配合部2,在变间距调节部4的驱动下,第一轨道配
合部1和第二轨道配合部2相对中间连接部3滑动,第一轨道配合部1和第二轨道配合部2沿轨道宽度方向相互靠近或远离。第一轨道配合部1和第二轨道配合部2通过中间连接部3间距连接。第一轨道配合部1、第二轨道配合部2和中间连接件,三者在轨道延伸方向是相对静止的,因而三者在轨道延伸方向同步运动。
43.第一轨道配合部1与中间连接部3滑动配合,滑动方向与轨道延伸方向成一定角度,该角度不等于0
°
或180
°
,优选90
°
。第二轨道配合部2与中间连接部3滑动配合,滑动方向与轨道延伸方向成一定角度,该角度不等于0
°
或180
°
,优选90
°
。
44.第一轨道配合部1和第二轨道配合部2分别在两条轨道5上运动,使得双轨攀爬机构沿轨道延伸方向运动。第一轨道配合部1在一根轨道5上运动,第二轨道配合部2在另一根轨道5上运动。第一轨道配合部1和第二轨道配合部2使得双轨攀爬机构能够在轨道5上前后运动。
45.本技术实施例的一种实现方式中,中间连接部3的前侧面和后侧面设置有变间距滑块7。双轨攀爬机构的前后方向是指轨道延伸方向,双轨攀爬机构的左右方向是指轨道宽度方向。中间连接部3的连接基座10整体呈长方体形,在前侧面和后侧面靠近顶角处设置变间距滑块7。优选的,设置四个变间距滑块7,第一变间距滑块701位于前侧面的左端,第二变间距滑块702位于后侧面的左端,第三变间距滑块703位于前侧面的右端,第四变间距滑块704位于后侧面的右端。
46.第一轨道配合部1和第二轨道配合部2设置有向内突出部。轨道配合部整体呈“长条板凳形”或“兀”字形,轨道配合部有两个向内突出部,向内突出部相当于长条板凳的凳腿。向内突出部与轨道配合部的主体垂直,向内突出部是沿着轨道宽度方向突出的。向内突出部是从轨道配合部的主体向中间连接部3突出的。第一轨道配合部1的向内突出部和第二轨道配合部2的向内突出部相向。优选的,为了限制第一轨道配合部1和第二轨道配合部2的运动范围,避免第一轨道配合部1和第二轨道配合部2相互碰撞,可以在中间连接部3的前后侧面设置中间突出部,使得中间连接部3整体呈“中”字形。
47.向内突出部的内侧面设置有变间距滑轨6。第一轨道配合部1的主体和第二轨道配合部2的主体在左右两侧包围中间连接部3,第一轨道配合部1的向内突出部和第二轨道配合部2的向内突出部在前后两面包围中间连接部3。向内突出部的内侧面是指向内突出部朝向中间连接部3的一侧。
48.变间距滑块7和变间距滑轨6滑动配合。变间距滑轨6与变间距滑块7一一对应。
49.本技术实施例的一种实现方式中,变间距调节部4包括电动缸11和连杆机构9,连杆机构9的末端铰接第一轨道配合部1和第二轨道配合部2,电动缸11安装在中间连接部3,电动缸11推动连杆机构9伸缩,使得第一轨道配合部1和第二轨道配合部2相对运动。电动缸11可以为一个或多个。连杆机构9由两根以上连杆组成,连杆之间优选铰接。连杆机构9优选对称结构,以实现对第一轨道配合部1和第二轨道配合部2的协同调整。电动缸11一端可以铰接或固定在中间连接部3,电动缸11的另一端与连杆机构9的一根连杆铰接或固定连接。电动缸11伸缩会带动连杆机构9改变形状,使得连杆机构9能够带动第一轨道配合部1和第二轨道配合部2相互靠近或远离。
50.本技术实施例的一种实现方式中,第一轨道配合部1和第二轨道配合部2设置有爬行轮8,第一轨道配合部1和第二轨道配合部2通过爬行轮8在轨道5上运动。爬行轮8由电机
驱动。爬行轮8设置有与轨道5适配的凹槽,使得轨道5能够嵌入爬行轮8,避免爬行轮8出现脱轨,增强了双轨攀爬机构在轨道5上运行的稳定性。
51.本技术实施例的一种实现方式中,第一轨道配合部1包括第一上轨道配合部101和第一下轨道配合部102,第一上轨道配合部101和第一下轨道配合部102滑动连接,第一上轨道配合部101和第一下轨道配合部102在行进电机12的驱动下,沿轨道延伸方向相对运动。
52.第二轨道配合部2包括第二上轨道配合部201和第二下轨道配合部202,第二上轨道配合部201和第二下轨道配合部202滑动连接,第二上轨道配合部201和第二下轨道配合部202在行进电机12的驱动下,沿轨道延伸方向相对运动。
53.双轨攀爬机构分为两层,上层包括上轨道配合部,下层包括下轨道配合部。上轨道配合部和下轨道配合部能够在轨道延伸方向相对滑动,使得双轨攀爬机构能够在上轨道配合部和下轨道配合部的交替运动下蠕动前进。双轨攀爬机构的蠕动包括两个交替进行的基本步骤:上轨道配合部相对轨道5固定,下轨道配合部相对上轨道配合部在轨道延伸方向滑动;下轨道配合部相对轨道5固定,上轨道配合部相对下轨道配合部在轨道延伸方向滑动。
54.需要说明的是,第一轨道配合部1、第一上轨道配合部101、第一下轨道配合部102、第二轨道配合部2、第二上轨道配合部201和第二下轨道配合部202均可以简称为轨道配合部。第一上轨道配合部101和第二上轨道配合部201均可以简称上轨道配合部,第一下轨道配合部102和第二下轨道配合部202均可以简称下轨道配合部。
55.本技术实施例的一种实现方式中,第一下轨道配合部102的上表面固定设置有行进滑块13,第一上轨道配合部101的下表面固定设置有行进滑轨14,行进滑块13和行进滑轨14滑动配合。
56.第二下轨道配合部202的上表面固定设置有行进滑块13,第二上轨道配合部201的下表面固定设置有行进滑轨14,行进滑块13和行进滑轨14滑动配合。
57.下轨道配合部的上表面设置行进滑块13,上轨道配合部的下表面设置行进滑轨14,行进滑块13和行进滑轨14滑动配合,使得上轨道5配合和下轨道配合部滑动配合。需要说明的是,行进滑块13和行进滑轨14的安装方式还可以是其他,此处不作限定。
58.本技术实施例的一种实现方式中,第一轨道配合部1和第二轨道配合部2包括夹爪17,夹爪17用于夹紧或松开轨道5,以使得双轨攀爬机构能够在轨道5上蠕动前进。轨道配合部的夹爪17夹紧轨道5时,该轨道配合部固定在轨道5上。轨道配合部的夹爪17松开轨道5后,该轨道配合部才能够相对轨道5运动。
59.本技术实施例的一种实现方式中,第一上轨道配合部101在轨道延伸方向上的长度大于第一下轨道配合部102。
60.第二上轨道配合部201在轨道延伸方向上的长度大于第二下轨道配合部202。
61.上轨道配合部长于下轨道配合部。下轨道配合部的夹爪17在上轨道配合部的夹爪17之间运动,避免出现干涉。
62.本技术实施例的一种实现方式中,行进电机12固定安装在第一下轨道配合部102,行进电机12通过齿轮15和齿条16驱动第一上轨道配合部101和第一下轨道配合部102相对运动,齿条16固定安装在第一上轨道配合部101,齿轮15安装在行进电机12的输出端。
63.行进电机12固定安装在第二下轨道配合部202,行进电机12通过齿轮15和齿条16驱动第二上轨道配合部201和第二下轨道配合部202相对运动,齿条16固定安装在第二上轨
道配合部201,齿轮15安装在行进电机12的输出端。
64.行进电机12的输出端连接齿轮15,齿轮15与齿条16啮合。行进电机12驱动齿轮15转动,使得齿轮15在齿条16上运动,齿条16固定在上轨道配合部,齿轮15带动下轨道配合部相对上轨道配合部运动。
65.本技术实施例的一种实现方式中,中间连接部3包括第一中间连接部301和第二中间连接部302。
66.第一中间连接部301通过变间距滑块7和变间距滑轨6连接第一上轨道配合部101和第二上轨道配合部201。
67.第二中间连接部302通过变间距滑块7和变间距滑轨6连接第一下轨道配合部102和第二下轨道配合部202。
68.中间连接部3分为第一中间连接部301和第二中间连接部302。第一中间连接部301与上轨道配合部滑动连接,第二中间连接部302与下轨道配合部滑动连接。第一中间连接部301也可以称为上中间连接部3,第二中间连接部302也可以称为下中间连接部3。需要说明的是,在双层结构下,也可以仅使用一层中间连接部3,即仅使用第一中间连接部301或第二中间连接部302。
69.本技术实施例的一种实现方式中,变间距调节部4包括第一变间距调节部401和第二变间距调节部402。
70.第一变间距调节部401连接第一中间连接部301、第一上轨道配合部101和第二上轨道配合部201,第一变间距调节部401用于驱动第一上轨道配合部101和第二上轨道配合部201相对第一中间连接部301滑动。
71.第二变间距调节部402连接第二中间连接部302、第一下轨道配合部102和第二下轨道配合部202,第二变间距调节部402用于驱动第一下轨道配合部102和第二下轨道配合部202相对第二中间连接部302滑动。
72.第一变间距调节部401安装在第一中间连接部301,连接上轨道配合部,第二变间距调节部402安装在第二中间连接部302,连接下轨道配合部。需要说明的是,在双层结构下,也可以仅使用一层变间距调节部4,即仅使用第一变间距调节部401或第二变间距调节部402。
73.为了进一步说明,提供两个具体实施例。实施例1为单层结构,实施例2为双层结构,仅为示例,不作为限制。
74.实施例1:
75.如图1所示,一种双轨攀爬机构,包括。第一轨道配合部1、第二轨道配合部2、中间连接部3及变间距调节部4。
76.如图2所示,第一轨道配合部1包括若干变间距滑轨6及若干爬行轮8,优选2个变间距滑轨6和2个爬行轮8。爬行轮8与轨道5配合。电机驱动爬行轮8,使得第一轨道配合部1可沿轨道延伸方向运动。轨道5也可以称为导轨。
77.第二轨道配合部2包括若干变间距滑轨6及若干爬行轮8,爬行轮8与轨道5配合。电机驱动爬行轮8,使得第二轨道配合部2可沿轨道延伸方向运动。优选的,第二轨道配合部2与第一轨道配合部1组成部件一致,即包括2个变间距滑轨6和2个爬行轮8。
78.第一轨道配合部1和第二轨道配合部2分别与不同的轨道5配合。
79.如图3所示,中间连接部3包括连接基座10和若干变间距滑块7。优选设置4个变间距滑块7,分别为第一变间距滑块701、第二变间距滑块702、第三变间距滑块703和第四变间距滑块704。其中第一变间距滑块701和第二变间距滑块702分别与第一轨道配合部1中的两个变间距滑轨6配合,使得第一轨道配合部1可相对中间连接部3滑动。第三变间距滑块703和第四变间距滑块704分别与第二轨道配合部2中的两个变间距滑轨6配合,使得第二轨道配合部2可相对中间连接部3滑动。
80.如图4所示,变间距调节部4包括第一连杆901、第二连杆902、第三连杆903、第四连杆904、第五连杆905和电动缸11。第一连杆901、第二连杆902、第三连杆903、第四连杆904和第五连杆905构成连杆机构9。第一连杆901、第二连杆902、第三连杆903和第四连杆904为相同零件且其各有一端分别与第五连杆905铰接。第一连杆901、第二连杆902平行布置,且第一连杆901、第二连杆902远离第五连杆905的一端与第一轨道配合部1铰接。第三连杆903、第四连杆904平行布置,且第三连杆903、第四连杆904远离第五连杆905的一端与第二轨道配合部2铰接。电动缸11的一端与第五连杆905铰接,电动缸11的另一端与中间连接部3铰接。
81.当电动缸11伸长或缩短时,会带动第五连杆905直线移动。第一轨道配合部1与第五连杆905通过第一连杆901和第二连杆902铰接、第二轨道配合部2与第五连杆905通过第三连杆903和第四连杆904铰接,第五连杆905直线移动会带动第一轨道配合部1、第二轨道配合部2相对中间连接部3滑动。因此,可通过控制电动缸11伸缩运动来调节第一轨道配合部1与第二轨道配合部2之间的距离,以使得第一轨道配合部1和第二轨道配合部2的间距适应双轨的间距。在图4所示的实施例中,电动缸11伸长时,第一轨道配合部1和第二轨道配合部2之间的距离缩短;电动缸11缩短时,第一轨道配合部1和第二轨道配合部2之间的距离增大。当电动缸11保持不动时,第一轨道配合部1和第二轨道配合部2之间的距离不变。
82.上述变间距调节部4只是控制第一轨道配合部1和第二轨道配合部2相对中间连接部3滑动的一种方式,也可通过其他动力方式实现,如分别设置第一电动缸11和第二电动缸11,第一电动缸11一端与第一轨道配合部1连接,第一电动缸11的另一端与中间连接部3连接,当第一电动缸11伸或缩时可带动第一轨道配合部1相对中间连接部3滑动。同理,第二电动缸11一端与第二轨道配合部2连接,第二电动缸11的另一端与中间连接部3连接,当第二电动缸11伸或缩时可带动第二轨道配合部2相对中间连接部3滑动。
83.攀爬机构中第一轨道配合部1和第二轨道配合部2中设置的爬行轮8分别与轨道5配合,带动双轨攀爬机构整体沿轨道延伸方向爬行。
84.第一轨道配合部1、第二轨道配合部2与中间连接部3可滑动,通过变间距滑轨6和变间距滑块7配合只是实现该滑动功能的一种方式。变间距滑轨6可设置在第一轨道配合部1、第二轨道配合部2,变间距滑块7可设置在中间连接部3;或者,变间距滑轨6可设置在中间连接部3,变间距滑块7可设置在第一轨道配合部1、第二轨道配合部2。
85.实施例2:
86.如图5所示,一种双轨攀爬机构,包括。第一轨道配合部1、第二轨道配合部2、中间连接部3及变间距调节部4。
87.如图6所示,第一轨道配合部1包括第一上轨道配合部101和第一下轨道配合部102,第一上轨道配合部101可相对第一下轨道配合部102沿轨道延伸方向滑动。第一上轨道
配合部101包括若干夹爪17、若干变间距滑轨6、行进滑轨14和齿条16。优选设置2个夹爪17和2个变间距滑轨6,夹爪17可对轨道5进行抓持和放开。第一下轨道配合部102包括若干夹爪17、若干变间距滑轨6、若干行进滑块13、齿轮15和行进电机12。优选设置2个夹爪17、2个变间距滑轨6和2个行进滑块13,夹爪17可对轨道5进行抓持和放开。第一上轨道配合部101中的行进滑轨14与第一下轨道配合部102中的行进滑块13配合使得第一上轨道配合部101可相对第一下轨道配合部102沿轨道延伸方向滑动。第一上轨道配合部101中的齿条16与第一下轨道配合部102中的齿轮15配合,齿轮15由行进电机12驱动,当行进电机12转动时,行进滑块13相对行进滑轨14滑动,进而第一上轨道配合部101相对第一下轨道配合部102沿轨道延伸方向滑动。电机也可以称为马达。
88.第二轨道配合部2包括第二上轨道配合部201和第二下轨道配合部202,第二上轨道配合部201可相对第二下轨道配合部202沿轨道延伸方向滑动。第二上轨道配合部201包括若干夹爪17、若干变间距滑轨6、行进滑轨14和齿条16。优选的,第二上轨道配合部201与第一上轨道配合部101的组成部件一致,设置2个夹爪17和2个变间距滑轨6,夹爪17可对轨道5进行抓持和放开。第二下轨道配合部202包括若干夹爪17、若干变间距滑轨6、若干行进滑块13、齿轮15和行进电机12。优选的,第二下轨道配合部202与第一下轨道配合部102的组成部件一致,设置2个夹爪17、2个变间距滑轨6和2个行进滑块13,夹爪17可对轨道5进行抓持和放开。第二上轨道配合部201中的行进滑轨14与第二下轨道配合部202中的行进滑块13配合使得第二上轨道配合部201可相对第二下轨道配合部202沿轨道延伸方向滑动。第二上轨道配合部201中的齿条16与第二下轨道配合部202中的齿轮15配合,齿轮15由行进电机12驱动,当行进电机12转动时,行进滑块13相对行进滑轨14滑动,进而第二上轨道配合部201相对第二下轨道配合部202沿轨道延伸方向滑动。
89.行进滑轨14与行进滑块13配合的滑动只是实现上轨道配合部相对下轨道配合部相对滑动的一种方式,可通过其他滑动配合形式来实现。行进滑轨14可设置在下轨道配合部,行进滑块13可设置在上轨道配合部;或者,行进滑轨14可设置在上轨道配合部,行进滑块13可设置在下轨道配合部。
90.齿轮15与齿条16配合的传动只是实现上轨道配合部相对下轨道配合部相对滑动的一种动力传递方式,可通过齿轮15链条等其他方式实现。齿轮15可设置在上轨道配合部,齿条16可设置在下轨道配合部;或者,齿轮15可设置在下轨道配合部,齿条16可设置在上轨道配合部。
91.第一上轨道配合部101和第二上轨道配合部201可以称为上轨道配合部;第一下轨道配合部102和第二下轨道配合部202可以称为下轨道配合部。
92.中间连接部3包括第一中间连接部301和第二中间连接部302,参见图5。第一中间连接部301和第二中间连接部302功能和构成相同,包括连接基座10和若干变间距滑块7参见如图3。第一中间连接部301和第二中间连接部302均设置4个变间距滑块7,分别为第一变间距滑块701、第二变间距滑块702、第三变间距滑块703和第四变间距滑块704。
93.第一中间连接部301连接第一上轨道配合部101和第二上轨道配合部201。
94.第一变间距滑块701和第二变间距滑块702分别与第一轨道配合部1中第一上轨道配合部101的两个变间距滑轨6配合,使得第一上轨道配合部101可相对第一中间连接部301滑动。
95.第三变间距滑块703和第四变间距滑块704分别与第二轨道配合部2中第二上轨道配合部201的两个变间距滑轨6配合,使得第二上轨道配合部201可相对第一中间连接部301滑动。
96.第二中间连接部302连接第一下轨道配合部102和第二下轨道配合部202。第一变间距滑块701和第二变间距滑块702分别与第一下轨道配合部102的两个变间距滑轨6配合,使得第一下轨道配合部102可相对第二中间连接部302滑动。第三变间距滑块703和第四变间距滑块704分别与第二下轨道配合部202的两个变间距滑轨6配合,使得第二下轨道配合部202可相对第二中间连接部302滑动。
97.变间距调节部4包括第一变间距调节部401和第二变间距调节部402,第一变间距调节部401和第二变间距调节部402功能和构成相同,包括第一连杆901、第二连杆902、第三连杆903、第四连杆904、第五连杆905和电动缸11,参见图4。第一连杆901、第二连杆902、第三连杆903和第四连杆904为相同零件且其各有一端分别与第五连杆905铰接。
98.第一变间距调节部401中,第一连杆901、第二连杆902平行布置,第一连杆901、第二连杆902远离第五连杆905的一端与第一上轨道配合部101铰接;第三连杆903、第四连杆904平行布置,第三连杆903、第四连杆904远离第五连杆905的一端与第二上轨道配合部201铰接。电动缸11的一端与第五连杆905铰接,电动缸11的另一端与第一中间连接部301铰接。
99.第二变间距调节部402中,第一连杆901、第二连杆902平行布置,第一连杆901、第二连杆902远离第五连杆905的一端与第一下轨道配合部102铰接;第三连杆903、第四连杆904平行布置,第三连杆903、第四连杆904远离第五连杆905的一端与第二下轨道配合部202铰接。电动缸11的一端与第五连杆905铰接,电动缸11的另一端与第二中间连接部302铰接。
100.当第一变间距调节部401、第二变间距调节部402中电动缸11同步伸长或缩短时,会带动第一变间距调节部401、第二变间距调节部402中动第五连杆905直线移动。
101.第一上轨道配合部101与第一变间距调节部401中的第五连杆905通过第一连杆901和第二连杆902铰接、第二上轨道配合部201与第一变间距调节部401中的第五连杆905通过第三连杆903和第四连杆904铰接,第五连杆905直线移动会带动第一上轨道配合部101、第二上轨道配合部201相对第一中间连接部301滑动。
102.第二下轨道配合部202与第二变间距调节部402中的第五连杆905通过第一连杆901和第二连杆902铰接、第二下轨道配合部202与第二变间距调节部402中的第五连杆905通过第三连杆903和第四连杆904铰接,第五连杆905直线移动会带动第一下轨道配合部102、第二下轨道配合部202相对第二中间连接部302滑动。
103.因此,可通过控制第一变间距调节部401、第二变间距调节部402中电动缸11同步伸缩运动来调节第一轨道配合部1与第二轨道配合部2之间的距离,以使得第一轨道配合部1和第二轨道配合部2的间距适应双轨的间距。
104.下面对实施例2的双轨攀爬机构的工作过程进行说明:
105.101、第一变间距调节部401和第二变间距调节部402同步伸缩,使得双轨攀爬机构的宽度和轨道5的宽度相适应。
106.102、第一轨道配合部1、第二轨道配合部2所有夹爪17抓持轨道5。
107.103、第一上轨道配合部101、第二上轨道配合部201中所有夹爪17放开对轨道5的抓持,且行进电机12转动使得第一上轨道配合部101、第二上轨道配合部201分别相对第一
下轨道配合部102、第二下轨道配合部202沿轨道5单向移动一段距离。
108.104、第一上轨道配合部101、第二上轨道配合部201中所有夹爪17抓持轨道5。
109.105、第一下轨道配合部102、第二下轨道配合部202所有夹爪17放开对轨道5的抓持,且行进电机12转动使得第一下轨道配合部102、第二下轨道配合部202分别相对第一上轨道配合部101、第二上轨道配合部201沿轨道5同方向移动一段距离。
110.交替反复执行步骤102至步骤105,可实现该双轨攀爬机构在双轨上的攀爬。
111.需要说明的是,上轨道配合部、下轨道配合部地位等同,步骤103和步骤105顺序可互换。
112.在实施例2的基础上,可以调整得到更多的实施例,下面举例子说明:
113.如图7所示,可选的,在实施例2的基础上,去除第一变间距调节部401或第二变间调节部其中之一,也可实现第一轨道配合部1与第二轨道配合部2之间间距的调节。图7所示为去除第二变间距调节部402的状态。
114.如图8所示,可选的,在实施例2的基础上,去除第一变间距调节部401、第一中间连接部301、第一上轨道配合部101所有变间距滑轨6和第二上轨道配合部201所有变间距滑轨6,也可实现第一轨道配合部1与第二轨道配合部2之间间距的调节和双轨攀爬机构整体在双轨上的攀爬。
115.如图9所示,可选的,在实施例2的基础上,去除第二变间距调节部402、第二中间连接部302、第一下轨道配合部102所有变间距滑轨6和第二下轨道配合部202所有变间距滑轨6,也可实现第一轨道配合部1与第二轨道配合部2之间间距的调节和双轨攀爬机构整体在双轨上的攀爬。
116.以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。