1.本实用新型涉及灌装机领域,具体涉及一种定量自动灌装机。
背景技术:
2.灌装机主要是包装机中的一小类产品,从对物料的包装角度可分为液体灌装机,膏体灌装机,粉剂灌装机和颗粒灌装机;
3.农用硅微粉有不同规格的灌装需求,需要调节灌装的容量,为此需要一种定量调控的灌装机,来满足工厂对多规格产品的灌装需求。
技术实现要素:
4.本实用新型提出了一种定量自动灌装机,满足工厂对多规格产品的灌装需求。
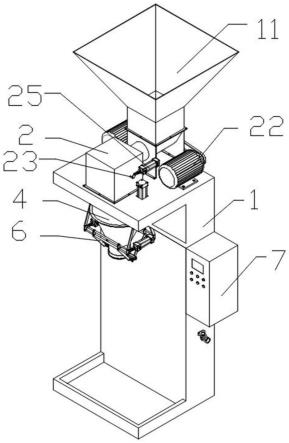
5.本实用新型的目的可以通过以下技术方案实现:一种定量自动灌装机,包括进料口、给料机构、机架、出料口、称重机构、夹袋机构和下料机构,所述给料机构包括进料口、料仓、螺旋杆、料门、和第一气缸,所述机架顶部固定连接有料仓,所述进料口底部与料仓固定连接,所述料仓的内部转动连接有两个螺旋杆,所述机架的顶部固定连接有两个电机,所述电机的输出端与螺旋杆固定连接,所述料仓转动连接有转轴,所述转轴贯穿料仓,所述转轴的圆周外侧固定连接有料门,所述料门位于料仓内部,所述料仓外侧靠近出料口的一侧固定连接有第一气缸。
6.进一步的,所述进料口包括四棱锥形料口和固定连接在四棱锥形料口底部的矩形料口。
7.进一步的,所述机架上设有出料口,所述称重机构包括称重模块和传感器,所述称重模块下底面通过螺栓与机架固定连接,所述出料口顶部与称重模块用螺栓固定,所述称重模块上固定连接有传感器,所述出料口顶部和机架间需留有一定的间隙。
8.进一步的,所述出料口下方设有下料机构,所述下料机构包括第一下料口、第二下料口和第三下料口,所述第一下料口底部固定连接有第二下料口,所述第二下料口底部固定连接有第三下料口,所述下料机构的两侧设有第二气缸,所述第二气缸顶部与机架固定连接,所述第二气缸的活塞杆固定连接在第三下料口的两侧。
9.进一步的,所述夹袋机构包括两组钳形结构和两个第三气缸,两组所述钳形结构通过两个第三气缸对称连接。
10.进一步的,所述钳形结构包括压杆一、压杆二、连接杆和皮带,所述连接杆的两端均转动连接有向上的压杆一,所述连接杆的两端均转动连接有向下的压杆二,所述压杆二与皮带固定连接。
11.进一步的,所述压杆一顶部设有固定孔,所述压杆一通过固定孔和第三下料口两侧固定连接。
12.进一步的,所述皮带的内侧固定连接有l形皮质物块,另一个所述皮带的内侧固定连接有倒l形皮质物块。
13.进一步的,所述机架的一侧固定连接有显示屏,所述显示屏内部安装有控制器。
14.本实用新型的有益效果:
15.当灌装重量达到所设定的重量时,机架顶部的电机停止运转,螺旋杆停止转动,硅微粉也停止向前推动下料;达到灌装重量的同时,进料口左侧的气缸收缩,使料门转动挡住下料口处,防止在完成灌装重量后由于外界因素的影响导致下料口处继续下料所导致的灌装精度降低;
16.通过设置的夹带机构,可以更换不同规格的包装袋。
附图说明
17.下面结合附图对本实用新型作进一步的说明。
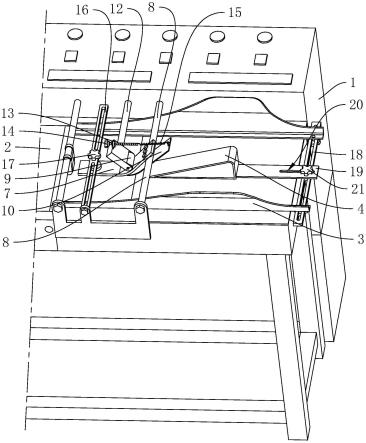
18.图1为本技术的总体结构示意图;
19.图2为本技术的仰视图;
20.图3为本技术的料仓内部示意图;
21.图4为本技术的进料口示意图;
22.图5为本技术的称重机构示意图;
23.图6为本技术的夹带机构示意图;
24.图7为本技术的下料机构示意图;
25.图8为本技术的工作流程图;
26.图9为本技术的称重机构控制框图。
27.图中各标号对应的部件如下:1、机架;2、料仓;11、进料口;21、螺旋杆;22、电机;23、转轴;24、料门;25、第一气缸;111、四棱锥形;112、矩形料口;3、称重机构;31、称重模块;32、传感器;4、下料机构;41、第一下料口;42、第二下料口;43、第三下料口;5、第二气缸;6、夹袋机构;61、钳形结构;62、第三气缸;611、压杆一;612、压杆二;613、连接杆;614、皮带;615、固定孔;616、l形皮质物块;617、倒l形皮质物块;7、显示屏;8、出料口;
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
29.如图1-3和图8所示,一种定量自动灌装机,包括进料口11、机架1、出料口8、称重机构3、夹袋机构6和下料机构4,所述给料机构包括进料口11、料仓2、螺旋杆21、料门24和第一气缸25,所述机架1顶部固定连接有料仓2,所述进料口11底部与料仓2固定连接,所述料仓2的内部转动连接有两个螺旋杆21,所述机架1的顶部固定连接有两个电机22,所述电机22的输出端与通过皮带614和螺旋杆21转动连接,所述料仓2转动连接有转轴23,所述转轴23贯穿料仓2,所述转轴23的圆周外侧固定连接有料门24,所述料门24位于料仓2内部,所述料仓2外侧靠近出料口8的一侧固定连接有第一气缸25。
30.具体的,采用双螺旋送料装置,两个螺旋杆21可分别控制给料速度的快慢,灌装任务开始时两个螺旋杆21同时转动进行给料,灌装重量接近所设定的重量时只有较小的螺旋
杆21进行给料,从而
①
实现精给料和粗给料两级调节,两个螺旋杆21分开控制也
②
可防止料仓2内的物料堵塞和粘连。出料口8处的料门24则是由气缸控制,当灌装任务完成时,气缸会自动伸长推动料门24旋转使料门24阻断下料,进一步提高灌装机的灌装精度。
31.如图4所示,所述进料口11包括四棱锥形111料口和固定连接在四棱锥形111料口底部的矩形料口112。
32.具体的,进料口11采用锥形的结构,由上至下料口逐渐缩小直至与下方进料口11的料仓2相配合,一方面可以充当料仓2,另一方面还可以增大结构的稳定性。锥形的进料口11可以保证进料口11上方有足够的空间进行下料,粉料由进料口11落入下方给料机构等待螺旋机构进行传输,粉料若是飞溅到进料口11倾斜的面板上也会滑落至料仓2处,进而大大降低了粉料由于外界原因造成的浪费。进料口11和料仓2可用螺栓螺母连接,采用可拆卸式方便灌装机维修以及运输,也可按照灌装要求或者灌装环境来更换不同的进料口11。
33.如图5和图9所示,所述机架1上设有出料口8,所述称重机构3包括称重模块31和传感器32,所述称重模块31下底面通过螺栓与机架1固定连接,所述出料口8顶部与称重模块31用螺栓固定,所述称重模块31上固定连接有传感器32,所述出料口8顶部和机架1间需留有一定的间隙。
34.具体的,采用这种结构可以使四个称重传感器32承受到下方所有的重量,包括出料口8,下方的夹袋机构6以及设备工作时挂在夹袋机构6上的包装袋和物料的重量,因此在使用设备前需要对设备进行调零,去掉出料口8以及夹袋机构6的重量,这样显示出来的重量才是包装袋和灌装物料的总重量。设备工作时,出料口8处会持续下料落入下方的包装袋中,下方重量不断增加会使称重模块31压迫称重传感器32,导致称重传感器32产生机械形变,传感器32的阻值随之变化,通过测量阻值就可以确定物料的重量。
35.如图7所示,所述出料口8下方设有下料机构4,所述下料机构4包括第一下料口41、第二下料口42和第三下料口43,所述第一下料口8底部固定连接有第二下料口8,所述第二下料口8底部固定连接有第三下料口8,所述下料机构4的两侧设有第二气缸5,所述第二气缸5顶部与机架1固定连接,所述第二气缸5的活塞杆固定连接在第三下料口43的两侧。
36.具体的,第一下料口41由矩形钢板和圆柱形钢板组成,矩形钢板四周要与称重模块31用螺栓固定,因此要比称重模块31的上板尺寸大一些,增加的接触区域保证了钢板能够承受比灌装物料更多的重量,同样,矩形钢板中央空心圆的尺寸也要大于机架1顶部的开口处,确保从料仓2运输掉落下来的粉料可以全部落入下料口。第二下料口42结构较为特殊,材料为布料或者其他柔性材料,下料机构4在工作时第三层所连接的第二气缸5会将其提升,第二层的柔性材料就为第三层提升时预留了空间。第三下料口43为圆锥形下料口,顶部尺寸较大保证从料仓2下来的料可以流畅的落入下料口不会堵塞,下料口底部需要与夹袋机构6和包装袋配合,因此第三层的锥形下料口也起到一个过渡作用,为了保证最下方与夹袋机构6配合的紧密,最下方焊接一片钢圈保证包装袋不会掉落。
37.如图8所示,所述夹袋机构6包括两组钳形结构61和两个第三气缸62,两组所述钳形机构通过两个第三气缸62对称连接。
38.所述钳形结构61包括压杆一611、压杆二612、连接杆613和皮带614,所述连接杆613的两端均转动连接有向上的压杆一611,所述连接杆613的两端均转动连接有向下的压杆二612,所述压杆二612与皮带614固定连接。
39.所述压杆一611顶部设有固定孔615,所述压杆一611通过固定孔615和第三下料口43两侧固定连接。
40.所述皮带614的内侧固定连接有l形皮质物块616,另一个所述皮带614的内侧固定连接有倒l形皮质物块617。
41.所述机架1的一侧固定连接有显示屏7。所述显示屏7内部安装有控制器,通过控制器来定量灌装,并且实现自动化。
42.具体的,在设备不工作时,第三气缸62的活塞杆呈伸长状态,由于压杆一611和压杆二612几乎是对称状态,在第三气缸62的作用下两侧的皮带614也会对称张开。当设备开始工作时,将包装袋套在下料口处,拨动开关,第三气缸62会进行收缩,夹袋机构6在第三气缸62的作用下两边会向内聚拢,皮带614会将包装袋压紧贴住下料口,皮带614两侧还装有l和倒l形的皮质物块,保证包装袋袋口两侧也能夹住不松动,提高稳定性。灌装任务完成时,第三气缸62活塞杆自动伸长,夹袋机构6打开,皮带614会远离下料口,解除夹袋。
43.下面具体说明本实用新型的工作原理:在工作时,首先由人工将包装袋口套在灌装机的出料口8处,按下夹袋机构6右侧的按钮,夹袋机构6两侧的气缸收缩,将包装袋夹紧贴合在出料口8出;此时机架1顶部的电机22开始运作,螺旋传动机构开始旋转,硅微粉在螺旋杆21的推动下向前推进,从机架1上端开口处掉入出料机构并从出料口8流入包装袋内;灌装机左侧配电箱的显示屏7上显示当前所灌装硅微粉的重量,当灌装重量达到所设定的重量时,机架1顶部的电机22停止运转,螺旋杆21停止转动,硅微粉也停止向前推动下料;达到灌装重量的同时,进料口11左侧的气缸收缩,使料门24转动挡住下料口处,防止在完成灌装重量后由于外界因素的影响导致下料口处继续下料所导致的灌装精度降低;待灌装完成后,出料口8两侧竖立的气缸伸长,将灌装完成的包装袋放到传送带,而后夹袋机构6两侧的气缸伸长,松开包装袋。
44.在本实用新型的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
45.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
46.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。