技术特征:
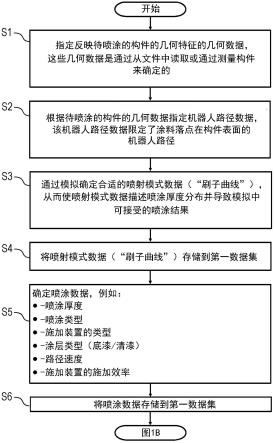
1.一种用于以喷涂机器人和施加装置喷涂构件的程序控制的喷涂设备进行编程的方法、特别是用于以喷漆机器人对机动车车身构件进行喷漆的喷漆设备进行编程的方法,具有以下步骤(s1-s3):a)规定或确定几何数据,所述几何数据代表待喷涂的构件的几何特征(s1);b)规定机器人路径数据(s2);b1)所述机器人路径数据限定了机器人路径,所述机器人路径将由喷涂机器人在喷涂操作中引导的施加装置的涂料落点遍历;以及b2)所述机器人路径是根据待喷涂的构件的预定几何数据限定的;c)确定合适的喷射模式数据(s3);c1)所述喷射模式数据代表层厚分布、特别是三维层厚分布,所述层厚分布是由施加装置在实际喷涂操作中在涂料落点周围的构件表面上产生的;以及c2)确定的喷射模式数据是为了在实际喷涂操作中,在沿所述机器人路径喷涂构件时达到可接受的喷涂结果;c3)所述合适的喷射模式数据是通过模拟确定的,所述模拟考虑到了所述机器人路径数据和待喷涂的构件的几何数据;以及c4)所述合适的喷射模式数据被存储在第一数据集中(s4)。2.根据权利要求1所述的方法,其特征在于,所述方法具有以下步骤:a)在确定可能的喷射模式数据后检查模拟的喷涂结果;b)如果检查显示喷涂结果不可接受,则优化给定的机器人路径;c)重复地确定可能的喷射模式数据并优化机器人路径,直到模拟的喷涂结果能够被接受。3.根据权利要求1或2所述的方法,其特征在于,所述方法具有以下步骤:a)确定用于操作施加装置的合适的施加参数(s8);a1)合适的施加参数是根据特征图从包含在第一数据集中的喷射模式数据中确定的;a2)在所述施加装置的实际操作过程中,当机器人路径被遍历时,所确定的合适的施加参数实现了合适的喷射模式数据;以及a3)所述合适的施加参数被存储在第二数据集中(s9);以及b)操作喷涂设备(s10);b1)根据机器人路径数据控制喷涂机器人,使所述施加装置的涂料落点在待喷涂的构件的表面上遍历预定的机器人路径;以及b2)以包含在第二组数据中的合适的施加参数来控制所述施加装置。4.根据权利要求3所述的方法,其特征在于,a)合适的喷射模式数据的确定是在喷涂设备的操作者一方的模拟框架内进行的、特别是自动地或在辅助用户的介入下进行的;b)具有在模拟过程中确定的合适的喷射模式数据的第一数据集从操作者一方传送到喷涂设备的制造商一方、特别是传送到服务提供商;c)合适的施加参数的确定是在制造商一方根据特征图和合适的喷射模式数据进行的、特别是由服务提供商进行确定的;以及d)具有合适的施加参数的第二数据集从制造商一方传送到操作者一方。
5.根据权利要求3所述的方法,其特征在于,a)合适的喷射模式数据的确定是在喷涂设备的操作者一方的模拟框架内进行的、特别是自动地或在辅助用户的介入下进行的;b)用于确定合适的施加参数的特征图是在制造商一方创建的、特别是由服务提供商创建的;c)用于确定合适的施加参数的特征图由服务提供商传送给操作者一方;以及d)合适的施加参数的确定是在操作者一方根据特征图和合适的喷射模式数据进行的。6.根据前述权利要求中任一项所述的方法,其特征在于,a)具有合适的喷射模式数据的第一数据集还包含以下喷涂数据:a1)构件表面上的涂层剂层的理想喷涂厚度、特别是干燥状态下的喷涂厚度;a2)用于识别涂层剂和/或涂层剂的特性的涂层剂标识符;a3)用于识别所述施加装置和/或所述施加装置的特性的施加装置标识符;a4)用于区分多层喷涂中的不同层的层信息、特别是区分底漆层和清漆层的层信息;和/或a5)涂料落点沿机器人路径的路径速度;和/或b)在确定合适的施加参数时,不仅要考虑包含在第一数据集中的喷射模式数据,还要考虑第一数据集中包含的喷涂数据,优选地还要考虑路径间距的参考值、路径速度的参考值、目标层厚、涂层剂的固体含量和作为假定经验值的施加装置的施加效率。7.根据前述权利要求中任一项所述的方法,其特征在于,所述机器人路径数据包含以下数据:a)机器人路径的空间路线;和/或b)涂料落点沿机器人路径的路径速度;和/或c)机器人路径中侧向相邻、侧向重叠或相邻的路径段之间的路径间距;和/或d)施加装置的布置;和/或e)涂料落点沿机器人路径的时间路线或涂料落点沿机器人路径的速度;和/或f)涂料流的开启点和/或和关闭点。8.根据权利要求6所述的方法,其特征在于,所述方法包括模拟中的以下步骤:a)将机器人路径细分为多个连续的路径段,这些连续的路径段将由施加装置的涂料落点次序地遍历;b)为机器人路径的各个路径段确定合适的喷射模式;c)为机器人路径的各个路径段确定合适的涂层剂流量、特别是以百分比、相对值或虚拟值的形式来确定;d)具有合适的喷射模式数据的第一数据集对于机器人路径的各个路径段均包含合适的喷射模式和合适的涂层剂流量、特别是以百分比、相对值或虚拟值的形式。9.根据权利要求7或8所述的方法,其特征在于,所述模拟是在以下迭代优化步骤中进行的:a)在第一优化步骤中,指定喷射模式和涂层剂流量的默认值、特别是以百分比、相对值或虚拟值的形式,并以默认值模拟产生喷涂结果;和/或b)在第二优化步骤中,测试待喷涂的构件表面上正好相邻的两个喷涂模块之间的简单
的模块连接处的喷涂厚度均匀性,并优化机器人路径以改善简单的模块连接处的喷涂厚度均匀性、特别是在挡泥板和引擎盖之间、前门和后门之间以及机动车车顶的各模块之间的喷涂厚度均匀性;和/或c)在第三优化步骤中,测试待喷涂的构件表面上两个以上的相邻喷涂模块之间的复杂的模块连接处的层厚均匀性,并优化机器人路径以改善复杂的模块连接处的层厚均匀性、特别是在挡泥板、引擎盖、前门、a柱或后挡泥板和后柱的交界处的层厚均匀性;和/或d)在第四优化步骤中,测试待喷涂的构件表面上相邻喷涂模块之间的简单和/或复杂的模块连接处的喷涂厚度均匀性,并优化以下变量以改善简单和/或复杂的模块连接处的喷涂厚度均匀性:d1)喷射模式数据;和/或d2)涂层剂流量、特别是以百分比、相对值或虚拟值的形式;和/或e)在第五优化步骤中,测试待喷涂的构件边缘处的喷涂厚度均匀性,并优化以下变量来改善构件边缘处的喷涂厚度均匀性;e1)机器人路径;e2)喷射模式数据;和/或e3)涂层剂流量、特别是以百分比、相对值或虚拟值的形式。10.根据权利要求8所述的方法,其特征在于,所述模拟的第一优化步骤的默认值根据以下变量来指定:a)直接相邻的喷涂路径的中心轴之间的路径距离的参考值;b)直接相邻的喷涂路径的重叠;和/或c)涂层剂流量的参考值、特别是以百分比、相对值或虚拟值的形式。11.根据前述权利要求中任一项所述的方法,其特征在于,模拟的喷涂结果在操作者一方的屏幕上以图形表示,特别是以待喷涂的构件的透视表示作为模型,并根据模拟的局部喷涂厚度表示模型的表面位置相关的颜色,特别是对应于模拟的局部喷涂厚度与喷涂厚度的预定参考值之间的偏差。12.根据前述权利要求中任一项所述的方法,其特征在于,用于确定与特定涂层剂和/或所使用的喷涂装置有关的合适的施加参数的特征图将下列变量彼此联系起来:a)喷涂厚度分布的宽度,特别是喷涂厚度分布的sb50值;b)施加装置的整形空气流;c)施加装置的涂层剂流量;d)用作施加装置的旋转式雾化器的转速;e)静电涂层剂电荷的高电压;f)施加装置沿机器人路径的路径速度;g)施加装置与待喷涂的构件的表面之间的喷涂距离。13.根据前述权利要求中任一项所述的方法,其特征在于,a)机器人路径数据是由喷涂设备的操作人员在操作者一方指定的、特别是自动地或辅助用户的介入下指定;和/或b)待喷涂的构件的几何数据由喷涂设备的操作人员在操作者一方指定、特别是自动地或在辅助用户的介入下指定。
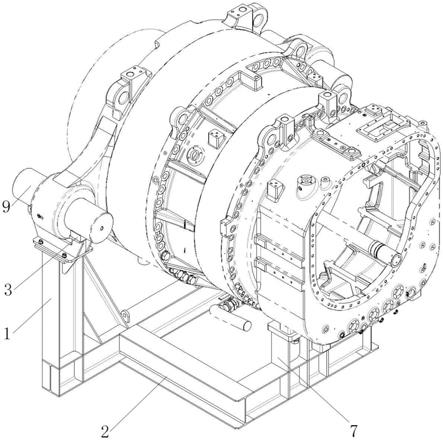
14.一种用于喷涂构件、特别是用于喷涂机动车车身构件的喷涂设备,具有a)至少一个喷涂机器人;b)至少一个由喷涂机器人引导的施加装置;以及c)控制所述施加装置和所述喷涂机器人的控制器,其特征在于,d)所述控制器执行根据前述权利要求中任一项所述的方法。15.根据权利要求14所述的喷涂设备,其特征在于,特征图被存储在所述控制器中,以便从合适的喷射模式数据中确定合适的施加参数。16.根据权利要求14或15所述的喷涂设备,其特征在于,所述喷涂设备具有数据接口以用于将具有合适的喷射模式数据的第一数据集传送给服务提供商,并用于从服务提供商处接收具有合适的施加参数的第二数据集。
技术总结
本发明涉及一种用于以喷涂机器人和施加装置喷涂构件的程序控制的喷涂设备进行编程的方法、特别是用于以喷漆机器人对机动车车身构件进行喷漆的喷漆装置设备进行编程的方法,具有以下步骤(S1-S3):a)指定或确定待喷涂的构件的几何数据(S1);b)指定机器人路径要跟随的机器人路径数据(S2);c)确定合适的喷射模式数据(S3),其反映了层厚分布并由考虑了机器人路径数据和待喷涂的构件的几何数据的模拟来确定。本发明还包括相应的合适的喷涂设备。本发明还包括相应的合适的喷涂设备。本发明还包括相应的合适的喷涂设备。
技术研发人员:H-J
受保护的技术使用者:杜尔系统股份公司
技术研发日:2021.05.10
技术公布日:2023/2/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。