一种排水管cctv机器人检测装置
技术领域
1.本实用新型涉及管道机器人技术领域,具体是一种排水管cctv机器人检测装置。
背景技术:
2.cctv管道检测机器人是一种可沿管道内部自动行走、携带一种或多种传感器及操作机械的设备,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统,它对于管道内部的情况可以进行实时影像监视、记录、视频回放、图像抓拍及视频文件的存储等操作,无需工作人员进入到管道内即可快速了解管道内部的情况。
3.由于管道内部的情况存在不确定性,当遇到管道内水流湍急或者管道内的碎石较多时,现有的检测机器人在行走时就可能出现不稳定,从而导致左右晃动或者翻转的情况发生,甚至操作机器人的损坏,从而影响到人们正常的检测工作,因此,针对以上现状,迫切需要开发一种排水管cctv机器人检测装置,以克服当前实际应用中的不足。
技术实现要素:
4.本实用新型的目的在于提供一种排水管cctv机器人检测装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种排水管cctv机器人检测装置,包括:
7.底板和支撑箱,所述支撑箱设于所述底板外侧;
8.脚轮,所述脚轮对称设于所述底板两侧,与排水管内壁相连,用于驱动装置移动;
9.缓冲组件,所述缓冲组件设于所述支撑箱与所述底板之间,用于配合所述底板实现对支撑箱的支撑;
10.摄像器,所述摄像器与所述支撑箱固定连接,用于实现对排水管的检测;
11.稳定机构,所述稳定机构与所述支撑箱相连,用于维持装置的稳定;
12.其中,所述稳定机构包括:
13.导向组件,所述导向组件对称设于所述支撑箱两侧,且与所述排水管内壁抵接;
14.调节组件,所述调节组件设于所述支撑箱内侧,且与所述导向组件相连,用于驱动所述导向组件实现对装置的固定;
15.清洁组件,所述清洁组件设于所述摄像器外侧,且与所述调节组件相连,用于配合所述调节组件实现对摄像器的清理。
16.与现有技术相比,本实用新型的有益效果是:
17.装置运行时,脚轮控制装置沿排水管进行移动,两侧的导向组件能保证装置在移动时的稳定性,调节组件能驱动清洁组件,清洁组件能对摄像器的摄像头进行清洁,从而避免雾气、灰尘或者水珠等杂质在摄像头上聚集,从而使摄像头捕捉到的影像更加清晰,能够有效的帮助检测人员对管道内的情况做出正确的判断,从而提升检测效率,当遇到管道内水流湍急或者管道内的碎石较多时,调节组件能驱动导向组件实现对装置的固定,进而保
证装置在管道内的稳定性,本技术相对于现有技术中检测机器人在行走时就可能出现不稳定,从而导致左右晃动或者翻转的情况发生,甚至操作机器人的损坏,从而影响到人们正常的检测工作,通过设置稳定机构和缓冲组件,能够有效的起到对机身进行支撑的效果,使机器人在管道内行走时能够得到更大的抓地面积,从而提高机器人的稳定性,有效的避免了因为水流湍急或者碎石较多而出现左右晃动甚至翻转情况的发生。
附图说明
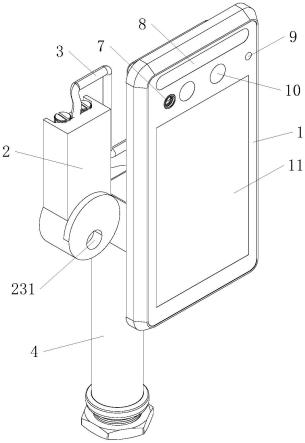
18.图1为排水管cctv机器人检测装置的结构示意图。
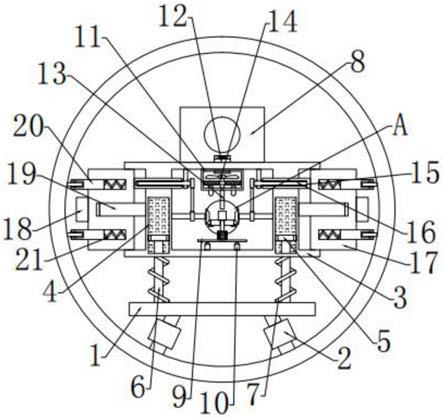
19.图2为图1中a处的放大结构示意图。
20.图3为排水管cctv机器人检测装置中转盘的结构示意图。
21.图中:1-底板,2-脚轮,3-支撑箱,4-缓冲槽,5-缓冲板,6-缓冲柱,7-第一弹性件,8-摄像器,9-调节板,10-伸缩件,11-导气箱,12-吹气管,13-转杆,14-风扇,15-活动杆,16-螺纹杆,17-滑块,18-橡胶垫,19-导向杆,20-导向架,21-第二弹性件,22-驱动件,23-驱动杆,24-控制块,25-转盘,26-支撑架,27-限位环。
具体实施方式
22.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
23.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
24.请参阅图1,本实用新型的一个实施例中,一种排水管cctv机器人检测装置,包括:底板1和支撑箱3,所述支撑箱3设于所述底板1外侧;脚轮2,所述脚轮2对称设于所述底板1两侧,与排水管内壁相连,用于驱动装置移动;缓冲组件,所述缓冲组件设于所述支撑箱3与所述底板1之间,用于配合所述底板1实现对支撑箱3的支撑;摄像器8,所述摄像器8与所述支撑箱3固定连接,用于实现对排水管的检测;稳定机构,所述稳定机构与所述支撑箱3相连,用于维持装置的稳定;其中,所述稳定机构包括:导向组件,所述导向组件对称设于所述支撑箱3两侧,且与所述排水管内壁抵接;调节组件,所述调节组件设于所述支撑箱3内侧,且与所述导向组件相连,用于驱动所述导向组件实现对装置的固定;清洁组件,所述清洁组件设于所述摄像器8外侧,且与所述调节组件相连,用于配合所述调节组件实现对摄像器8的清理。
25.本实施例中,所述脚轮2为电动脚轮,且具备防水功能,装置运行时,脚轮2控制装置沿排水管进行移动,两侧的导向组件能保证装置在移动时的稳定性,调节组件能驱动清洁组件,清洁组件能对摄像器8的摄像头进行清洁,从而避免雾气、灰尘或者水珠等杂质在摄像头上聚集,从而使摄像头捕捉到的影像更加清晰,能够有效的帮助检测人员对管道内的情况做出正确的判断,从而提升检测效率,当遇到管道内水流湍急或者管道内的碎石较多时,调节组件能驱动导向组件实现对装置的固定,进而保证装置在管道内的稳定性,本技术相对于现有技术中检测机器人在行走时就可能出现不稳定,从而导致左右晃动或者翻转的情况发生,甚至操作机器人的损坏,从而影响到人们正常的检测工作,通过设置稳定机构和缓冲组件,能够有效的起到对机身进行支撑的效果,使机器人在管道内行走时能够得到
更大的抓地面积,从而提高机器人的稳定性,有效的避免了因为水流湍急或者碎石较多而出现左右晃动甚至翻转情况的发生。
26.本实用新型的一个实施例中,所述导向组件包括:滑块17,所述滑块17对称设于所述支撑箱3两侧,与所述支撑箱3箱壁滑动连接,且与所述调节组件相连;导向件,所述导向件设于所述滑块17与所述支撑箱3之间;导向架20,所述导向架20对称设于所述滑块17一端两侧,且通过第二弹性件21与所述滑块17相连;橡胶垫18,所述橡胶垫18固定连接设于所述滑块17外侧,用于配合所述调节组件实现对装置的固定。
27.本实施例中,所述滑块17远离支撑箱3一端上下两侧均滑动连接设置有导向架20,导向架20包括架体和转动连接设置在架体内侧的导向轮,导向轮与排水管内壁滚动连接,所述导向架20与所述滑块17之间固定连接设置有第二弹性件21,所述第二弹性件21为弹簧,橡胶垫18设于两侧导向架20之间,与滑块17固定连接,另外的,导向件包括固定连接设置在所述支撑箱3上的导向杆19,导向杆19与滑块17滑动连接,所述滑块17 远离所述导向架20一端与调节组件内侧的活动杆15固定连接,通过设置导向组件,两侧滑块17外侧的导向架20能够有效的起到对机身进行支撑的效果,从而避免了装置出现左右晃动甚至翻转情况的发生,而当装置遇见水流湍急情况时,调节组件能驱动滑块17移动,设置在滑块17外侧的橡胶垫18与排水管内壁抵接,进而完成对装置的固定,从而使得装置能维持稳定。
28.本实用新型的一个实施例中,请参阅图1、图2和图3,所述调节组件包括:调节板9,所述调节板9设于所述支撑箱3内侧,且通过伸缩件10与所述支撑箱3相连;驱动件22,所述驱动件22与所述调节板9固定连接,且输出端通过驱动杆23与控制块24相连;活动杆15,所述活动杆15与所述支撑箱3滑动连接,且与所述滑块17固定连接;螺纹杆 16,所述螺纹杆16与所述支撑箱3转动连接,且与所述活动杆15螺纹连接;转盘25,所述转盘25设于所述控制块24与所述驱动件22之间,与设置在支撑箱3内侧的支撑架26 转动连接;传动杆,所述传动杆设于所述转盘25与所述螺纹杆16之间,与所述支撑箱3 转动连接,且一端通过齿轮件与所述转盘25相连,通过传动件与所述螺纹杆16相连,用于配合所述转盘25实现滑块17的移动。
29.本实施例中,所述驱动杆23贯穿所述转盘25,转盘25底端两侧均设置有与所述支撑箱3固定连接的支撑架26,所述转盘25外侧固定连接设置有限位环27,限位环27与支撑架26转动连接,转盘25两侧均设置有与所述支撑箱3转动连接的传动杆,所述齿轮件包括固定连接设置在所述传动杆和转盘25外侧的半齿轮,所述半齿轮之间为啮合连接,另外的传动件包括固定连接设置在传动杆和螺纹杆16外侧的带轮,所述带轮之间通过皮带相连,螺纹杆16与支撑箱3内侧的固定架转动连接,另外的,驱动件22和伸缩件10 分别设于所述调节板9两侧,所述伸缩件10固定连接设置在所述支撑箱3与调节板9之间,所述伸缩件10为电动伸缩杆,所述驱动件22为驱动电机,通过设置调节组件,伸缩件10驱动调节板9进行升降,调节板9带动驱动杆23外侧的控制块24进行移动,控制块24与转盘25相连后,控制块24带动转盘25旋转,转盘25通过锥齿轮带动传动杆旋转,传动杆通过带轮和皮带带动螺纹杆16旋转,螺纹杆16驱动活动杆15移动,进而实现滑块17的移动,使得装置在遭遇冲击时,能在排水管内侧保持稳定。
30.本实用新型的一个实施例中,所述清洁组件包括:导气箱11,所述导气箱11设于所述控制块24外侧,与所述支撑箱3固定连接;转杆13,所述转杆13与所述导气箱11转动连接,
与所述控制块24相对设置,且与设置在所述导气箱11内侧的风扇14固定连接,用于配合所述调节组件驱动空气流动;进气管,所述进气管设于所述导气箱11与所述支撑箱3之间;吹气管12,所述吹气管12设于所述摄像器8外侧,与所述导气箱11固定连接,用于实现对摄像器8的清洁;滤框,所述滤框设于所述风扇14与所述进气管之间,用于实现对空气的净化。
31.本实施例中,所述导气箱11固定连接设置在所述支撑箱3内侧顶部,所述导气箱11 内侧转动连接设置有转杆13,所述转杆13与设置在导气箱11内侧的风扇14固定连接,风扇14靠近进气管一端外侧设置有与导气箱11卡接的滤框,另外的,所述吹气管12内侧固定连接设置有阀门,所述阀门为单向阀,通过设置清洁组件,控制块24与转杆13相连后,控制块24配合驱动杆23带动转杆13旋转,转杆13带动风扇14旋转,外界空气沿进气管进入导气箱11内侧,滤框对空气进行净化,被净化后的空气从吹气管12排出,对摄像器8的摄像头进行清洁,从而避免雾气、灰尘或者水珠等杂质在摄像头上聚集,从而使摄像头捕捉到的影像更加清晰,能够有效的帮助检测人员对管道内的情况做出正确的判断,从而提升检测效率。
32.本实用新型的一个实施例中,所述缓冲组件包括:缓冲槽4,所述缓冲槽4设于所述支撑箱3箱壁内侧,且内侧设置有缓冲液;缓冲板5,所述缓冲板5滑动连接设于所述缓冲槽4内侧,且通过缓冲柱6与所述底板1相连;第一弹性件7,所述第一弹性件7设于所述支撑箱3与所述底板1之间。
33.本实施例中,所述缓冲槽4对称设于所述支撑箱3两端架壁内侧,其中,第一弹性件 7为弹簧,第一弹性件7环绕设于缓冲柱6外侧,第一弹性件7一端与支撑箱3固定连接,另一端与底板1固定连接,通过设置缓冲组件,能够有效的降低振动对装置造成的影响,使机器人更好的进行行走。
34.该排水管cctv机器人检测装置,通过设置稳定机构和缓冲组件,能够有效的起到对机身进行支撑的效果,使机器人在管道内行走时能够得到更大的抓地面积,从而提高机器人的稳定性,有效的避免了因为水流湍急或者碎石较多而出现左右晃动甚至翻转情况的发生,通过设置清洁组件,控制块24与转杆13相连后,控制块24配合驱动杆23带动转杆 13旋转,转杆13带动风扇14旋转,外界空气沿进气管进入导气箱11内侧,滤框对空气进行净化,被净化后的空气从吹气管12排出,对摄像器8的摄像头进行清洁,从而避免雾气、灰尘或者水珠等杂质在摄像头上聚集,从而使摄像头捕捉到的影像更加清晰,能够有效的帮助检测人员对管道内的情况做出正确的判断,从而提升检测效率,通过设置缓冲组件,能够有效的降低振动对装置造成的影响,使机器人更好的进行行走。
35.以上的仅是本实用新型的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本实用新型构思的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。