1.本发明涉及一种波束成型技术,尤其是,还涉及一种波束装置及波束控制方法。
背景技术:
2.在高频应用中,可利用波束成型器来改进天线系统的指向性。一般而言,天线阵列会设置在平面基板上。然而,这样的设计可能会不符合一些应用需求。例如,由于毫米波(mmwave)的小波长度所造成的高路径损失(path loss),因此毫米波天线阵列有设置在车辆外壳的需求。然而,车辆外壳通常是非平面。由此可知,有需要用于非平面的天线阵列的设计。
技术实现要素:
3.本发明实施例是针对一种波束装置及波束控制方法,并可实现非平面天线阵列系统。
4.根据本发明的实施例,波束成型装置包括(但不仅限于)非平面基板、天线阵列(antenna array)及调整电路。天线阵列包括数个天线单元,并设于非平面基板。调整电路耦接天线阵列,并用以根据所述非平面基板的形状及给定信号角度(predetermined signal angle)调整那些天线单元中的至少一个的信号。
5.根据本发明的实施例,波束控制方法包括(但不仅限于)下列步骤:提供非平面基板及天线阵列。天线阵列包括数个天线单元。根据所述非平面基板的形状及给定信号角度调整那些天线单元中的至少一个的信号。
6.基于上述,根据本发明实施例的波束成型装置及波束控制方法,提供设置于曲面的天线阵列,并可调整个天线单元的信号,使天线阵列根据所欲的转向角度辐射电磁波。藉此,可灵活地应用在更多情境中。
附图说明
7.包含附图以便进一步理解本发明,且附图并入本说明书中并构成本说明书的一部分。附图说明本发明的实施例,并与描述一起用于解释本发明的原理。
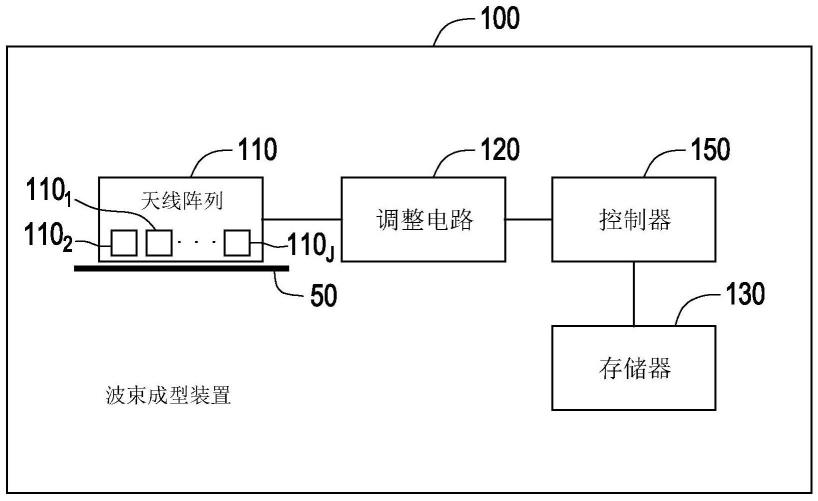
8.图1是根据本发明一实施例的波束成型装置的组件方块图;
9.图2a是根据本发明一实施例的天线单元与非平面基板的示意图;
10.图2b是根据本发明另一实施例的天线单元与非平面基板的示意图;
11.图3是根据本发明一实施例的半功率束宽(half-power beam width,hpbw)的示意图;
12.图4是根据本发明一实施例的参考点确定的示意图;
13.图5是根据本发明另一实施例的参考点确定的示意图;
14.图6a是图2a的局部放大图;
15.图6b是图4的局部放大图;
16.图6c是图4的另一局部放大图;
17.图7是根据本发明一实施例的两天线单元的辐射场型的示意图;
18.图8是根据本发明一实施例的波束控制方法的流程图。
19.附图标号说明
20.50、50-1、50-2:非平面基板;
21.100:波束成型装置;
22.110:天线阵列;
23.1101~110j、1111~1115、1121~1128、1131~1138:天线单元;
24.120:调整电路;
25.130:存储器;
26.150:控制器;
27.z:参考线;
28.z’:法线
29.xy0、xy1、xy2、xy3、xy4:参考平面;
30.hpbw:半功率束宽;
31.d:间距;
32.r:距离;
33.dos1~dos3:信号角度;
34.δθ、δθ2、δθ3、δθ4:角度差异;
35.δl、δl2、δl3、δl4:路径差异;
36.501、503:辐射场型;
37.s610~s620:步骤。
具体实施方式
38.现将详细地参考本发明的示范性实施例,示范性实施例的实例说明于附图中。只要有可能,相同组件符号在图式和描述中用来表示相同或相似部分。
39.图1是根据本发明一实施例的波束成型装置100的组件方块图。请参照图1,波束成型装置100包括(但不仅限于)非平面基板50、天线阵列110、调整电路120、存储器130及控制器150。
40.非平面基板50可以是均匀曲面或任意曲面。例如,图2a是根据本发明一实施例的天线单元1111~1115、1121~1128与非平面基板50-1的示意图。请参照图2a,非平面基板50-1的弧面有共同的中心点c,且弧面上的任两点分别至中心点c的距离r相等(即,均匀曲面)。又例如,图2b是根据本发明另一实施例的天线单元1131~1138与非平面基板50-2的示意图。请参照图2b,非平面基板50-2可能有多个曲率。然而,非平面基板50的表面形状还可能有其他变化,且本发明实施例不加以限制。
41.天线阵列110包括数个天线单元1101~110j(j为正整数,并为天线单元的总数)。天线阵列110的天线单元1101~110j设于非平面基板50上。以图2a为例,天线单元1111~1115、1121~1128设于非平面基板50-1的内凹面。另以图2b为例,天线单元1131~1138设于非平面基板50-2的外凸面。
beam width,hpbw)自天线单元1101~110j中选择至少二个第一单元以进行电磁波辐射。例如,部分或全部的天线单元1101~110j作为第一单元。在一实施例中,这些天线单元1101~110j中的未受选者作为第二单元。在一实施例中,控制器150通过调整电路120启用那些第一单元,且禁能那些第二单元。藉此,控制器150可进一步通过那些第一单元辐射电磁波,但中断第二单元辐射。
49.具体而言,以图2a为例,假设天线阵列110的转向角度(例如,0度)相同于参考线z(例如,设置位置的法线方向)并垂直于参考平面xy0。若转向角度为零度,则信号方向(direction of signal,dos)(对应于信号角度)平行于参考线z。图3是根据本发明一实施例的半功率束宽(half-power beam width,hpbw)的示意图。请参照图3,假设转向角度是零度,且半功率束宽hpbw大约介于15度至15度之间。
50.值得注意的是,半功率束宽hpbw的大小相关于第一单元的数量。这些第一单元启用后将用于形成具有所欲半功率束宽及信号角度的波束。
51.图2a中的那些天线单元1111~1115、1121~1128呈直线排列。例如,形成一列。天线单元1111~1115、1121~1128中的任两个相邻者之间有一个间距。例如,天线单元1115与天线单元1123之间有间距d。这些天线单元1111~1115、1121~1128所形成的半功率束宽可确定为:
[0052][0053]
hpbw0是转向角度为0度时的半功率束宽(或称本质(intrinsic)半功率束宽),λ是天线单元1111~1115、1121~1128的传送或接收信号的波长,m是同一列的第一单元的数量,且d为间距。
[0054]
从此公式(1),半功率束宽与(被启用的)第一单元的数量m、以及间距d与信号的波长λ的比值有关。那些第一单元的数量m可确定于:
[0055][0056]
hpbw是半功率束宽。
[0057]
例如,如果根据需求本质半功率束宽要小于25度,则根据上式可以得到:若第一单元的数量为5个时,则本质半功率束宽为20.3度。控制器150可根据天线单元1111~1115、1121~1128的位置选择第一单元。例如,所欲的信号角度对应于天线单元1113周边区域(例如在天线单元1113与天线单元1114之间并且还靠近天线单元1113,或是在天线单元1113与天线单元1112之间并且还靠近天线单元1113),则天线单元1111~1115作为第一单元(受启用),且天线单元1121~1128作为第二单元(受禁能)。因此,天线单元1111~1115可辐射,且天线单元1121~1128中断辐射。
[0058]
藉此,若信号方向(dos)与所选第一单元的群组的中心区域的法线之间的差异不为零,则可最小化这差异。换句话说,受启用的第一单元1111~1115所对应需要的转向角度(steering angle)趋近于零,从而实际上信号收发的能量效率得以提高。
[0059]
在一实施例中,控制器150可根据给定信号方向选择参考点。对应于这参考点及其非平面基板50上所处表面的切面垂直于给定信号方向。
[0060]
例如,图4是根据本发明一实施例的参考点确定的示意图。请参照图4,信号方向
dos1与参考平面xy2垂直。这参考平面xy2是天线单元1131所处表面的切面。因此,参考点位于天线单元1131上。此外,信号方向dos2与参考平面xy3垂直。这参考平面xy3是曲面上的切面。然而,信号方向dos2的延伸线与参考平面xy3的交界处位于天线单元1132与天线单元1133所处表面之间。因此,参考点位于天线单元1132与天线单元1133之间。图4中的范例,控制器150可视为参考点位于天线阵列110所处区域之内。
[0061]
又例如,图5是根据本发明另一实施例的参考点确定的示意图。请参照图5,信号方向dos3与参考平面xy4垂直。这参考平面xy4是曲面上的切面。然而,信号方向dos3的延伸线与参考平面xy3的交界处位于天线单元1134的一侧但并未位于另一个天线单元之间。因此,控制器150可视为参考点位于天线阵列110所处区域之外。
[0062]
在一实施例中,若参考点位于天线阵列10所处的区域时(如图4所示),则控制器150可根据半功率束宽确定位于同一直列(straight row/straight line)上的第一单元(也就是被启用的天线单元)的数量。例如,使用公式(2)来推算第一单元的数量。
[0063]
在一实施例中,若参考点未位于天线阵列10所处的区域(如图5所示),则控制器150可根据天线阵列10的转向角度(steering angle)确定半功率束宽改变比例,并根据这半功率束宽及半功率束宽改变比例选择那些第一单元。转向角度是位于最接近参考点的天线单元的切面的法线与给定信号角度之间的差异。以图5为例,由最接近参考点的天线单元1134所处表面的切面垂直延伸的法线n4与信号角度dos3之间的夹角可以被定义为转向角度。接着以下列算式计算数量m:
[0064][0065]
其中θs为转向角度。换句话说,上列公式(3)中的cosθs(或者其倒数,secθs)可视为是半功率束宽改变比例。
[0066]
若已确定第一单元,则可进一步确定这些第一单元收发信号时额外提供的相位延迟。以图2a为例,假设受选的第一单元是五个天线单元1111~1115。这些的天线单元1111~1115的中心为天线单元1113,且天线1113在非平面基板50-1的法线z’垂直于天线单元1113。法线z’垂直于参考平面xy1,并可据以确定这些天线单元1111~1115的相位延迟。
[0067]
在一实施例中,调整电路120可根据那些天线单元1101~110j中的至少两个第一单元在非平面基板50上的位置及给定信号角度补偿那些第一单元中的任一者在接收或发射信号时所需要的相位差异。具体而言,当天线阵列10要朝向信号方向(dos)收发信号时,一个天线单元(例如,图2a的天线单元1111)所需要的相位差异直接关联于此天线单元与一个正交于此信号方向(dos)的参考平面的距离。以图2a为例,当信号方向(dos)平行于法线z’时(即,参考位置位于受启用的第一单元),则被启用的各天线单元所需要的补偿的相位差异关联于各天线单元与参考平面xy1的距离。
[0068]
具体而言,以图2a为例,假设有一个待测装置(device-under-test,dut)位于中心点c。各天线单元1111~1115、1121~1128可分开或整合在一起以形成阵列天线110,因此得以在布有天线单元1111~1115、1121~1128的方向范围内,以任意方向接收来自dut的发射信号或是发射信号给dut。
[0069]
在此一实施例(例如,均匀弧面)中,相位差异可理解为相关于根据两个第一单元的法线之间的角度差异及间距所导致沿给定信号角度的路径差异。这路径差异是指,基于
非平面基板的形状,dut的电磁波以平行于信号角度的方位而到达这些第一单元的群组的假想平面(例如,参考平面xy1),则实际上电磁波信号到达每一个天线单元之间存在的路程差异。
[0070]
图6a是图2a的局部放大图。请参照图2a及图6a,假设在非平面基板50-1的一个弧形面中,两个天线单元1113与1114之间的间距可表示为:
[0071]
d=rδθ
…
(4)
[0072]
,δθ为两个天线单元1113与1114的法线之间的角度差异。
[0073]
若弧面的半径(例如,r)等于m倍的远场距离(例如,fr=2d2/λ)(即,m是由那些第一单元于非平面基板50上所占据区域定义的弧面的半径对应相对于远场距离的倍数),则角度差异可表示为:
[0074]
δθ=1/mn2…
(5)
[0075]
n是那些第一单元所定义的第一阵列的孔径(aperture)相对于间距的倍数。那些第一单元的整体视为第一阵列。
[0076]
图6a中所示的两个天线单元1114与1115之间的路径差异δl可以估测为:
[0077][0078]
,θ是给定信号角度(或是离开/接收角度)。若mn2很大(使得δθ很小),则对天线单元1114所增加的相位差异δψ可表示为:
[0079][0080]
藉此,可通过调整电路120针对特定第一单元补偿这相位差异。
[0081]
在一实施例中,若给定信号角度使得所需的转向角度为θs,则相位差异可表示为:
[0082][0083]
,n是第一单元的排列序号,ψn是第n个第一单元的相位差异,是对应于给定信号角度的第一单元的排列序号。以图2a为例,天线单元1111的排列序号为1,天线单元1112的排列序号为2,其余依此类推。而这些天线单元1111~1115的中心(即,天线单元1113)的排列序号为3。若给定信号角度为0度,则发射方向是朝向弧面的中心(例如,天线单元1113的所处位置)。即,给定信号角度对应于天线单元1113的法线方向。其中,公式(8)中的依照第一单元于非平面基板50上所占据的弧面的内凹(中心凹陷,使用正号)或外凸(中心凸起,使用负号)形状而选用对应的正负号。换句话说,对于控制器150控制每一个第一单元所电性连接的调整电路120以使收发的信号被赋予上式计算得到的相位差异,从而等效而言使得信号可视为是诸多第一单元在参考平面收到的。
[0084]
须说明的是,若受选的第一单元改变,则对应于这些第一单元的群组的假想法线、假想平面、相对转向角度及所欲补偿的相位差异也会改变。
[0085]
在一实施例中,当参考点位于两第一单元之间时,控制器150可根据接近的第一单元或参考点确定用于补偿的相位差异。
[0086]
若选择参考点最接近的第一单元,则控制器150可根据前述公式(4)~(8)确定相
位差异。根据这相位差异补偿仅会有较小但可容许的缺陷。
[0087]
以图6b为例,图6b是图4的局部放大图。请参照图4及图6b,图4所示的天线单元1133与1134是设于外凸弧面,因此选择公式(8)中的假设参考点较接近天线单元1132。因此,由天线单元1114所处作为修改的参考点。而。若给定信号角度使得所需的转向角度为θs,则相位差异可表示为:
[0088][0089]
若欲维持参考点,则控制器150可参考点或其所处表面的切面确定用于补偿的相位差异。
[0090]
以图6c为例,图6c是图4的另一局部放大图。请参照图4及图6c,图6c中所示的两个天线单元1132与1133与信号方向dos2的延伸线(假设位于天线单元1132与1133中间)之间的路径差异δl3和δl4可以估测为:
[0091][0092][0093]
。此外,由于天线单元1132与1133是设于外凸弧面,因此相位差异的确定也选择公式(8)中的(例如,公式(9))。
[0094]
在一实施例中,控制器150可根据那些天线单元1101~110j在非平面基板50上的位置通过调整电路120补偿天线单元1101~110j中的至少一个的元素因子(element factor)。由于天线单元1101~110j中的部分或全部并未处于相同平面或相互平行的平面,因此各天线单元1101~110j的辐射场型(即,元素因子)的朝向可能不同。控制器150可根据天线单元1101~110j在非平面基板50上的位置所造成朝向的差异、转向角度及辐射场型补偿至少一个天线单元1101~110j。
[0095]
举例而言,图7是根据本发明一实施例的两天线单元1101、1102的辐射场型501、503的示意图。请参照图7,假设转向角度是0度,并对应于天线单元1101的辐射场型501的朝向。而天线单元1102的辐射场型505的朝向是5度。由于两天线单元1101、1102并未处于相同平面,因此对于天线单元1102而言,在0度上的增益可能不及天线单元1101。因此,控制器150可对天线单元1102的信号补偿增益差异
△
g。
[0096]
在一实施例中,控制器150可根据那些天线单元1101~110j在非平面基板50上的位置通过调整电路120补偿天线单元1101~110j中的至少一个的路径损失(path loss)。以图5为例,天线单元1101、1102相距一段距离造成相位差。而相位差还造成路径损失。因此,控制器150可对天线单元1102的信号补偿路径损失的增益。
[0097]
另一方面,图8是根据本发明一实施例的波束控制方法的流程图。请参照图8,提供非平面基板50及天线阵列1101~110j(步骤s610)。根据非平面基板50的形状及天线阵列110的转向角度调整那些天线单元1101~110j中的至少一个的信号(步骤s620)。
[0098]
关于图8中的各步骤的实施细节在前述的实施例及实施方式都有详尽的说明,于
此不再赘述。在一实施例中,步骤s620可藉由控制器150协同调整电路120实现。除了以电路的形式实施,本发明实施例的各步骤与实施细节亦可由控制器以软件的方式实施,本发明实施例并不加以限制。
[0099]
综上所述,在本发明实施例的波束成型装置及波束控制方法中,提供设于非平面基板的天线阵列,并根据所欲的转向角度调整天线单元的信号。本发明实施例可根据所欲的波束场型选择启用的第一单元,并对所选第一单元的振幅及/相位的补偿。藉此,可将非平面设计的天线阵列应用在更多情境中。
[0100]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。