技术特征:
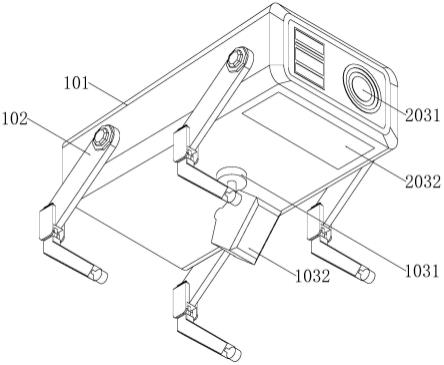
1.用于四足机器人空中位姿调整的喷气控制系统,包括四足机器人设备(1)和机器人控制系统(2),其特征在于:所述四足机器人设备(1)包括机器人主体(101)、四个活动足(102)和喷气组件(103),所述机器人控制系统(2)包括主控制器(201)、通信模块(202)和探测模块(203);四个所述活动足(102)分别活动连接于机器人主体(101)的两个侧面,所述喷气组件(103)设置于机器人主体(101)的正下方;所述主控制器(201)和通信模块(202)均固定于机器人主体(101)内部,所述探测模块(203)分布于机器人主体(101)上,并与主控制器(201)信号连接。2.根据权利要求1所述的用于四足机器人空中位姿调整的喷气控制系统,其特征在于:所述喷气组件(103)包括机械手(1031)和喷气式设备(1032),所述机械手(1031)的顶端与机器人主体(101)的底端固定,所述机械手(1031)的底端与喷气式设备(1032)固定。3.根据权利要求1所述的用于四足机器人空中位姿调整的喷气控制系统,其特征在于:所述探测模块(203)包括摄像头(2031)、红外测距传感器(2032),所述摄像头(2031)固定于探测模块(203)的前端,所述红外测距传感器(2032)装载于四足机器人设备(1)底端腹部的前端位置。4.用于四足机器人空中位姿调整的喷气控制方法,其特征在于:其具体步骤如下;步骤s1:主控制器控制四足机器人配合四个活动足移动;步骤s2:探测模块检测路线并判定是否存在沟壑,进行判定主控制器是否控制四足机器人配合四个活动足斜向上跃起;步骤s3:当存在沟壑时,四足机机器人跳起,探测模块探测沟壑规格和四足机器人的当前高度;步骤s4:当腹部搭载的喷气式设备探测到可通过自身腿部力量跳跃过去,喷气式设备在四足机器人起跳过程中不工作;步骤s5:当腹部搭载的喷气式设备探测到无法通过自身腿部力量跳跃过去,喷气式设备根据四足机器人当前的空中姿态计算喷气角度进行喷气,给四足机器人继续跃起提供动力;步骤s6:基于步骤s4和步骤s5,当四足机器人成功跃起一段时间后,喷气式设备调整喷气角度,改变四足机器人的空中姿态,促使四足机器人以最佳落地姿态下落;步骤s7:四足机器人下落到离地面一定距离时,喷气式设备调整喷气角度,竖直向下喷气,减缓四足机器人下落速度,促使四足机器人平稳落地;步骤s8:四足机器人落地以后,喷气式设备收缩,使四足机器人趴在地面上。5.根据权利要求4所述的用于四足机器人空中位姿调整的喷气控制方法,其特征在于:所述步骤s2中,主控制器控制四个活动足斜向上跳跃,并控制斜向上的跳跃角度。6.根据权利要求4所述的用于四足机器人空中位姿调整的喷气控制方法,其特征在于:所述步骤s5中,在喷气式设备机械能进行喷气时,机械手初次控制喷气式设备的喷气角度。7.根据权利要求4所述的用于四足机器人空中位姿调整的喷气控制方法,其特征在于:所述步骤s6中,在四足机器人进行空中跳跃时,判定四足机器人的跳跃姿态,机械手再次控制喷气式设备的喷气角度,具体判定和操作方法如下:假设此时机身平面与水平面的夹角为γ,将质心与机身前端中点连线的中点记为q1,
质心与机身后端中点连线的中点记为q2,此时分为两种情况:当四足机器人向前倾斜,即头部低于尾部,此时调整喷气角度为通过q1竖直向上喷气,直至四足机器人机身水平;当四足机器人向后倾斜,即头部高于尾部,此时调整喷气角度为通过q2竖直向上喷气,直至四足机器人机身水平。8.根据权利要求4所述的用于四足机器人空中位姿调整的喷气控制方法,其特征在于:所述步骤s7中,红外测距传感器运用三角测量方法,红外发射器发射的红外光束遇到地面时反射,反射回来的红外光束被ccd检测器检测到,根据光的反射定律以及三角关系计算出地面到四足机器人的距离s,具体计算公式如下:式中,l为ccd检测器检测到被反射的红外光束产生的偏移值,x为红外发射器中心线与ccd检测器中心线之间的距离,f为滤镜的焦距,α为入射角度。9.根据权利要求4所述的用于四足机器人空中位姿调整的喷气控制方法,其特征在于:所述步骤s8中,机械手控制喷气式设备收缩,并保证枕喷气式设备在四个活动足之间处于悬空状态。
技术总结
本发明公开了用于四足机器人空中位姿调整的喷气控制系统及方法,属于机器人领域,用于四足机器人空中位姿调整的喷气控制系统及方法,包括四足机器人设备和机器人控制系统,四足机器人设备包括机器人主体、四个活动足和喷气组件,机器人控制系统包括主控制器、通信模块和探测模块;四个活动足分别活动连接于机器人主体的两个侧面,喷气组件设置于机器人主体的正下方;主控制器和通信模块均固定于机器人主体内部,探测模块分布于机器人主体上,并与主控制器信号连接,它可以实现对四足机器人的空中姿态进行实时调整,并可对四足机器人提供跳跃的动力,使四足机器人在遇到有沟壑的地面时可以轻松通过,为四足机器人提供了极大的便利。便利。便利。
技术研发人员:甄圣超 赵中乐 王君 刘豪华 陈宇
受保护的技术使用者:合肥工业大学
技术研发日:2022.11.17
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。