1.本实用新型属于技术领域,特别是涉及一种基于毫米波雷达的汽车两侧盲区行驶预警系统。
背景技术:
2.随着科技的高速发展,智慧交通、智慧城市的不断深入,人们对汽车的安全保障等提出了更高的要求,交管部门及车辆运营公司也希望能通过汽车安装更智能化系统减少事故伤亡及不必要的损失。
3.汽车,尤其是大而长的货车和客车,由于汽车a柱视线盲区以及转弯时车轮产生的较大内轮差造成的视线盲区,很容易被司机忽视导致发生交通事故,而且因为车型较大,事故造成的破坏力一般也很大。
4.现有的探测预警系统主要有以下两种:
5.第一种以摄像头视觉探测为核心,但容易受天气等环境影响导致功能劣化或失效;以摄像头视觉探测为核心的预警系统,因视觉传感器的数据量大于毫米波雷达,不断增加的视觉传感器数量导致系统数据量过大,存在系统复杂,成本高的问题。同时视觉传感器得到的是二维信息,没有深度信息,探测距离近,对距离和速度判断不准确,并且容易受到天气的影响,导致功能劣化;
6.第二种以雷达为核心,但目前方案普遍存在检测区域不精准、外部输入依赖较多、下线标定复杂、成本偏高的问题。
7.实用新型人在实现本实用新型过程中,发现相关技术中至少存在如下问题:
8.汽车两侧盲区的探测预警的准确度不足以及成本高的问题。
技术实现要素:
9.本实用新型的目的在于提供一种基于毫米波雷达的汽车两侧盲区行驶预警系统,根据车辆当前车辆状态数据结合车外信息采集设备获取的目标物体的相对距离、相对速度以及相对角度进行预设驾驶辅助系统算法处理,判断车辆两侧检测区域是否存在目标物体来进行预警,解决了现有的汽车两侧盲区的探测预警的准确度不足以及成本高问题。
10.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
11.本实用新型为一种基于毫米波雷达的汽车两侧盲区行驶预警系统,包括:
12.车外信息采集设备,所述车外信息采集设备包括前置摄像头、前置毫米波雷达和超声波雷达;所述车外信息采集设备用于实时采集车辆周围物体与车辆之间的间距,以生成包含距离信息和/或视频图像数据;
13.车载电脑,所述车载电脑用于获取车辆状态数据;
14.数据处理模块,所述数据处理模块与车外信息采集设备和车载电脑相连,用于接收距离信息、视频图像数据和车辆状态数据进行转化,发送至辅助驾驶系统;
15.辅助驾驶系统,所述辅助驾驶系统用于接收数据处理模块处理后的数据进行预设
驾驶辅助系统算法处理,以生成用于判定车辆行驶状态的车辆预警信息;所述预设驾驶辅助系统算法为adas算法。
16.作为一种优选的技术方案,所述辅助驾驶系统分别与电子转向控制器、自动变速箱控制器、智能刹车控制器、车身控制器和发动机控制器相连;所述电子转向控制器接收辅助驾驶系统的操作指令控制电动助力机进行车辆方向的转动;所述自动变速箱控制器接收辅助驾驶系统的操作指令控制无级变速箱进行车辆的减速;所述智能刹车控制器接收辅助驾驶系统的操作指令控制车辆的制动;所述车身控制器接收辅助驾驶系统的操作指令控制车辆灯具的开启;所述发动机控制器接收辅助驾驶系统的操作指令控制车辆发动机的启停。
17.作为一种优选的技术方案,所述车辆状态数据包括车辆位置、行驶速度、扭矩请求状态、方向盘转角、方向盘转速、方向盘扭矩、车速、轮速中的至少一种。
18.作为一种优选的技术方案,所述车载电脑内置有人机交互界面;所述人机交互界面用于实现预警信号报警、车辆状态数据显示和预警参数设置的功能;所述车载电脑通过can总线与数据处理模块通信连接。
19.作为一种优选的技术方案,所述辅助驾驶系统用于根据车辆两侧与目标物体的相对距离、相对速度以及相对角度,结合车辆状态数据,在确定车辆两侧检测区域存在目标物体时,发送报警操作指令至电子转向控制器、自动变速箱控制器、智能刹车控制器、车身控制器和发动机控制器。
20.作为一种优选的技术方案,所述车辆灯具包括车辆内的报警指示灯、车辆外的双闪灯和转向灯。
21.本实用新型具有以下有益效果:
22.本实用新型根据车辆当前车辆状态数据结合车外信息采集设备获取的目标物体的相对距离、相对速度以及相对角度进行预设驾驶辅助系统算法处理,判断车辆两侧检测区域是否存在目标物体来进行预警,并发送控制指令到对应控制器来进行避让,降低了制造成本,提高了探测预警的准确度。
23.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
24.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
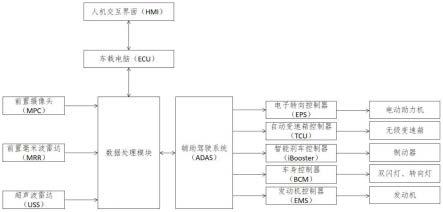
25.图1为本实用新型的一种基于毫米波雷达的汽车两侧盲区行驶预警系统结构示意图。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下
所获得的所有其它实施例,都属于本实用新型保护的范围。
27.请参阅图1所示,本实用新型为一种基于毫米波雷达的汽车两侧盲区行驶预警系统,包括:
28.车外信息采集设备,车外信息采集设备包括前置摄像头、前置毫米波雷达和超声波雷达;车外信息采集设备用于实时采集车辆周围物体与车辆之间的间距,以生成包含距离信息和/或视频图像数据;
29.车载电脑,即ecu可以连接数码相机、手机、游戏手柄、优盘、移动硬盘、摄像机、pda、netmd等数码设备,并通过gprs/cdma 1x以及wifi等方式连接互联网,而本技术文件的车载电脑用于获取车辆状态数据;车辆状态数据包括车辆位置、行驶速度、扭矩请求状态、方向盘转角、方向盘转速、方向盘扭矩、车速、轮速中的至少一种;车载电脑内置有人机交互界面;人机交互界面用于实现预警信号报警、车辆状态数据显示和预警参数设置的功能;车载电脑通过can总线与数据处理模块通信连接。
30.数据处理模块,数据处理模块与车外信息采集设备和车载电脑相连,用于接收距离信息、视频图像数据和车辆状态数据进行转化,发送至辅助驾驶系统;
31.辅助驾驶系统,辅助驾驶系统用于接收数据处理模块处理后的数据进行预设驾驶辅助系统算法处理,以生成用于判定车辆行驶状态的车辆预警信息;预设驾驶辅助系统算法为adas算法。辅助驾驶系统分别与电子转向控制器、自动变速箱控制器、智能刹车控制器、车身控制器和发动机控制器相连;
32.电子转向控制器,即eps(electronic power steering),由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。另外,还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点,本技术文件的电子转向控制器接收辅助驾驶系统的操作指令控制电动助力机进行车辆方向的转动;
33.自动变速箱控制器,即tcu(transmission control unit),采用计算机和电力电子驱动技术实现车辆自动变速,而无级变速一般是由无级变速cvt和无级变速箱控制器tcu组成,用于接收辅助驾驶系统的操作指令控制无级变速箱进行车辆的减速;
34.智能刹车控制器,即(ibooster)能够实现主动建压,而无需驾驶员踩下制动踏板,用于接收辅助驾驶系统的操作指令控制车辆的制动;
35.车身控制器机,即bcm(body control management),主要功能是实现离散的控制功能,对众多用电器进行控制。主要控制汽车车身用电器,如灯具、雨刮、门锁、电动窗、天窗等,就是这些用电器的开关信号输入给bcm,bcm直接或通过继电器控制相应电器工作。车身控制器的主要作用是通过电信号协调车身各功能用件的工作,车身控制器可以控制包括门窗、安全气囊、转向灯和雨刮器等电子元器件。基本上所有的车辆都配备了车身控制器,车身控制器的应用使现在的汽车得以实现越来越复杂的功能,本技术文件主要实现预警功能,所以只需控制车辆的灯具进行预警即可。车身控制器接收辅助驾驶系统的操作指令控制车辆灯具的开启,车辆灯具包括车辆内的报警指示灯、车辆外的双闪灯和转向灯;
36.发动机控制器,即ems(engine management system)包括控制器、传感器、执行器三大组成部分,接收辅助驾驶系统的操作指令控制车辆发动机的启停。
37.辅助驾驶系统用于根据车辆两侧与目标物体的相对距离、相对速度以及相对角
度,结合车辆状态数据,在确定车辆两侧检测区域存在目标物体时,发送报警操作指令至电子转向控制器、自动变速箱控制器、智能刹车控制器、车身控制器和发动机控制器。
38.实施例一
39.驾驶员在驾驶车辆行驶的过程中,车外信息采集设备用于实时采集车辆周围物体与车辆之间的间距,以生成包含距离信息和/或视频图像数据。
40.车外信息采集设备包括前置摄像头、前置毫米波雷达和超声波雷达,工作原理如下:
41.超声波雷达发出超声波,遇到障碍物时反射,被接收器接收,从而获取到障碍物间的具体距离。但超声波雷达工作范围在0.1-3米之间;当超声波雷达监测到在这个距离区间内存在障碍物才会通过数据处理模块启动前置摄像头和前置毫米波雷达。
42.前置摄像头拍摄车外障碍物信息,拍摄的视频可以在车内的车载电脑内实时观看,驾驶员可以在0.1-3米的范围内,手动操作车辆进行避让;若手动操作即可进行避让,就不用启动辅助驾驶系统。
43.前置毫米波雷达的波长在1mm-10mm之间,拥有极强的穿透性,可以轻易地穿透塑料、漆面等材质。所以,毫米波雷达经常被安装在保险杠,甚至车身侧面骨架上。它的工作原理就是发射毫米波出去,遇到物体后反射,再由反射器接受,通过时间差计算距离。当计算的障碍物距离小于预设的距离范围时,前置毫米波雷达通过数据处理模块启动辅助驾驶系统。
44.实施例二
45.在实施例一的基础上,当障碍物距离小于预设的距离范围时,将车外信息采集设备实时采集车辆周围物体与车辆之间的间距,以生成包含距离信息和/或视频图像数据发送至数据处理模块;数据处理模块进行数据格式的转化,转化成辅助驾驶系统可以直接处理的数据格式。
46.辅助驾驶系统进行预设驾驶辅助系统算法处理,即进行adas算法处理;根据处理的结果,分为以下四种情况:
47.1)以当前车速,直接转弯即可避开障碍物
48.这种情况下,辅助驾驶系统发送操作指令至电子转向控制器和车身控制器,电子转向控制器根据当前车速进行转向,并同时控制车身控制器打开转向灯进行转向操作。
49.2)以当前车速,需要减少转弯即可避开障碍物
50.这种情况下,辅助驾驶系统发送操作指令至电子转向控制器、车身控制器、自动变速箱控制器和智能刹车控制器,电子转向控制器根据当前车速进行转向,控制车身控制器打开转向灯进行转向操作,同时双闪打开提醒后车,自动变速箱控制器进行降档操作,同时智能刹车控制器控制刹车进行减速。
51.3)以当前车速,无法避开障碍物,需要停车、倒车才可避开障碍物
52.这种情况下,辅助驾驶系统发送操作指令至电子转向控制器、车身控制器、自动变速箱控制器、智能刹车控制器和发动机控制器。电子转向控制器根据当前车速进行转向,控制车身控制器打开转向灯进行转向操作,同时双闪打开提醒后车,同时智能刹车控制器控制刹车进行减速,自动变速箱控制器进行倒档操作,控制车辆倒车。
53.4)车辆发生碰撞
54.这种情况下,辅助驾驶系统发送操作指令至车身控制器和发动机控制器。车身控制器打开双闪灯,并由发动机控制器直接关闭发动机。
55.值得注意的是,上述系统实施例中,所包括的各个单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本实用新型的保护范围。
56.另外,本领域普通技术人员可以理解实现上述各实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,相应的程序可以存储于一计算机可读取存储介质中。
57.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。