1.本发明涉及农业机械技术领域,涉及一种谷物种子质量流量计量装置,具体涉及一种谷物播种量监测装置。
背景技术:
2.目前的谷物智能化播种机通过智能化方法设定犁入深度和放料闸门的开度;谷物智能化播种机,以下简称为播种机,包括播种框架、播种犁、料斗、自动放料器、测速器、土壤湿度传感器和第一单片机控制器;所述播种框架通过三个播种联杆与拖拉机的尾部相联,拖拉机通过播种联杆操纵播种机向上升降和翻转;播种犁、料斗和自动放料器分别与播种框架固定联接;料斗的位置最高,里面盛放谷物种子;料斗底部设有料斗出料口;自动放料器包括放料闸门和电缸;所述放料闸门设置在料斗出料口下部,电缸的推杆和放料闸门联接;电缸和测速器分别与第一单片机控制器电联接;放料闸门的开度是这样设定的:第一单片机控制器根据预先输入的一亩地的播种量和测速器,计算出放料闸门的开度,电缸推拉放料闸门至一定的开度,放料闸门挡住一部分料斗出料口,并留出一部分不遮挡,谷物种子从未被遮挡部分流出,未被遮挡部分的面积与所播种谷物种子的体积成正比例,所播种谷物种子的体积与播种量成正比例;所述的播种量是指一亩地所播种谷物种子的质量,单位是斤/亩。本行业内习惯使用播种量来衡量谷物种子种植密度的大小。所述的谷物是指水稻、小麦、玉米、谷子、高粱、大麦、花生等需要播种种子进行种植的农作物。
3.然而,这样计量的播种量并不准确。
4.同样的开度,料斗在装满时和接近消耗净时谷物种子的播种量差别比较大,在装满时的播种量较大,在接近消耗净时的播种量较小,在料斗由满至空的播种过程中播种量大小不是恒定的;然而,播种量的大小仅仅通过放料闸门的开度来确定,缺少一种监测装置,没有对播种量信息进行反馈,更没有采取措施对放料闸门的开度随着实际播种量大小进行自动调节,导致实际播种量与预期播种量有较大偏差。
5.田地的土壤干湿度不恒定,在播种时要根据土壤湿度传感器所测得的土壤干湿度进行调节播种深度,由拖拉机通过播种联杆操纵播种机升降,从而调节播种犁插入地面以下的深度,以上即为设定犁入深度的方法;然而,播种犁插入的深度不同,播种机前后方向的倾斜角度也不同,倾斜角度也会影响到播种量的大小,当料斗出料口垂直朝下时其播种量较大,倾斜得越严重则播种量越小。
6.田地的土壤干湿度不恒定,则拖拉机陷入地面以下的深度也不同;比如在水稻荐里种植小麦,地面较湿,拖拉机陷入地面以下较深,则需要使播种机向上抬起一段距离,以使其播种犁保持在需要的高度;在玉米荐里种植小麦,地面较干,拖拉机陷入地面以下较浅,则需要使播种机向下多插入一段距离,以使其播种犁保持在需要的高度。拖拉机所操纵的播种机的高度不同,则导致料斗出料口的倾斜角度不同,同样大小的开度,实际播种量就有大小差异。
7.拖拉机的型号不同,其自重大小也有区别,其陷入地面以下的深度也不同;比如使
用江苏东洋机械有限公司生产的pd80z型插秧机的配套拖拉机后面配置播种机,该拖拉机是专门针对于水田设计的,重量较轻,使用多翼片实心橡胶轮胎,其陷入地面以下的深度较浅;济宁豪耀机械设备制造厂生产的雷沃欧豹1404农用拖拉机是专门针对于旱田设计的,重量较重,其陷入地面以下的深度较深。这同样也会导致料斗出料口的倾斜角度不同,同样大小的开度,实际播种量也有大小差异。
8.驾驶员在驾驶室内操作,只能通过电器自动化系统调节开度来设定播种量,无法知晓其实际播种量大小,即使料斗出料口被异物,比如一片植物的落叶堵塞,实际播种量变为零,他也不知道,造成漏播,造成播过的田地没有播入谷物种子,不长庄稼,没有收成,造成较大的经济损失。
技术实现要素:
9.本发明就是针对现有技术存在的上述不足,提供一种谷物播种量监测装置,本发明能自动监测播种量,并能给自动放料器提供信息反馈;能判断料斗出料口是否被异物堵塞,防止漏播,避免农户的损失;能使电阻应变器自动保持水平,使监测结果没有太大偏差。
10.为实现上述目的,本发明提供如下技术方案:一种谷物播种量监测装置,包括监测装置,所述监测装置包括圆弧管、电阻应变器和保持支架;所述电阻应变器水平设置,所述电阻应变器的第一端和保持支架固定联接,所述电阻应变器的第二端和圆弧管的外轮廓面固定联接;所述圆弧管的角度小于90度,所述圆弧管的上端开口朝后上方、下端开口朝前下方。
11.所述的监测装置还包括伺服电机,所述伺服电机的外壳和播种框架固定联接,所述伺服电机的输出轴和保持支架固定联接,所述伺服电机输出轴的轴心线和圆弧管的轴心线重合。
12.所述的监测装置还包括进料管组件,所述进料管组件包括进料管和接料漏斗;所述进料管的后上端和接料漏斗的下端连通,所述进料管的前下端伸入到圆弧管的后上端口内,但是进料管和圆弧管并不接触,防止两者之间有力的传递而导致监测数据出现偏差;所述接料漏斗的上端前后方向尺寸较长,左右方向尺寸较窄,位于料斗出料口正下方,无论开度有多大,谷物种子总能落入接料漏斗内;所述进料管组件和保持支架固定联接,进料管组件伸入圆弧管的尺寸长度是确定的,确保所有谷物种子沿着圆弧管内壁滑动的路径、路径的长度都是相同的。
13.以上所述的保持支架上还固定设置有平衡锤,使圆弧管、电阻应变器、进料管组件、保持支架和平衡锤的组合的重心位于伺服电机输出轴的轴心线上,防止偏心,防止伺服电机失步。
14.本发明还包括电子水平仪,所述电子水平仪和播种框架固定联接,所述电子水平仪测量其基准面与水平方向在前后方向的倾斜角。
15.本发明还包括电阻信号处理器;所述电阻信号处理器包括四个电阻,分别是第一电阻r1、第二电阻r2、第三电阻r3和第四电阻r4,还包括恒压直流电源;所述恒压直流电源的开路电压是u;所述四个电阻按顺时针方向首尾依次电联接,其中点a是第一电阻r1和第三电阻r3连接导线上的点,b是第二电阻r2和第四电阻r4连接导线上的点,c是第一电阻r1和第二电阻r2连接导线上的点,d是第三电阻r3和第四电阻r4连接导线上的点;其中点a和
点b分别联接在恒压直流电源的正负极两端,在点c和点d之间产生输出电压uo;所述第一电阻r1是指电阻应变器上的电阻应变片的电阻;所述第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4和恒压直流电源组成了电阻应变片悬臂梁电桥电路,输出电压uo和第一电阻r1成正比;当谷物种子落到圆弧管内,其重力加载在电阻应变器的第二端时,电阻应变器发生弹性变形,第一电阻r1发生了应变电阻
△
r1,应变电阻
△
r1的大小和谷物种子的质量大小成正比;于是输出电压uo和压在圆弧管内壁上的谷物种子的质量成正比,以此测量出瞬间流经圆弧管内壁的谷物种子的质量,即下种率k,单位是公斤/秒。
16.播种量的计算公式为:s=f*k/(b*v*t);其中,s-播种量,单位是:公斤/亩;k-下种率,单位是:公斤/秒;f-田地面积单位的换算系数,f=666.7平方米/亩;b-行宽,单位是:米;v-拖拉机的行走速度,单位是:米/秒;t-播种机上共设置播种犁的个数,没有量纲;公式中共四个变量参数,已知任意三个就可以求出剩余的一个。
17.所述保持支架上还固定设置有圆弧形的触发板,所述监测装置还包括初位传感器,所述初位传感器安装在播种框架上,触发板随着保持支架转动,触发板触发初位传感器。
18.本发明还包括第二单片机控制器,所述电阻信号处理器、电子水平仪、伺服电机和初位传感器分别与第二单片机控制器电联接。如果所述播种机是新制造的,第二单片机控制器和第一单片机控制器可以使用同一个单片机控制器;如果是在原有播种机基础上进行升级改造,也可以配置一个新的第二单片机控制器,第二单片机控制器和第一单片机控制器相通讯。
19.所述的前方是指拖拉机牵引播种机在田间行走的水平方向,与前方相反的方向是后方,与前后方向相垂直的水平方向是左右方向。
20.本发明和整个播种机一起的工作过程是这样的。
21.1.初始化校准。使拖拉机操纵播种机向上翻转抬起,会使播种犁离开地面、悬在空中,使电子水平仪的基准面处于水平位置,此时校准电子水平仪的读数为0度;伺服电机驱动圆弧管、电阻应变器、进料管组件、保持支架和平衡锤的组合旋转至触发板触发初位传感器,此时电阻应变器处于水平状态,通过电阻应变器采集下种率k的数值,此时由于没有谷物种子从圆弧管内通过,下种率k数值设定为0公斤/秒。作为悬臂的电阻应变器,在水平时载荷对它有最大的力矩;相对于水平面倾斜角度n时,即电阻应变器的第一端和第二端有了高差时,力矩大小会减小为水平状态时的cos(n)倍;为了保持测量的准确性,要始终调整电阻应变器的角度为水平。
22.2. 预设定播种量s、行宽b、行走速度v和播种机上共设置播种犁的个数t。
23.3.拖拉机控制播种机翻转下降,通过智能化方法设定犁入深度和放料闸门的开度,对应着理论上的下种率k;但是由于其它很多因素的影响,这时实际的下种率k’和按照理论设定的下种率k相比可能会有偏差。本发明的监测装置进入工作状态。料斗内的谷物种
子从料斗出料口和放料闸门之间的空间流下,落入下面的接料漏斗,然后又通过进料管流入到圆弧管后上端,沿着圆弧管靠下侧的壁朝前下方流动,从圆弧管前下端落入播种犁的上口,经过播种犁播入到地面以下。
24.4.电子水平仪检测当前播种机的倾斜角度n,倾斜的方向是前端高、后端低,并把检测信息通过第二单片机控制器处理后传递给伺服电机。
25.5.伺服电机驱动圆弧管、电阻应变器、进料管组件、保持支架和平衡锤的组合朝相反的方向旋转角度n,即电阻应变器的前端向下、后端向上,旋转的最终状态是电阻应变器保持为水平。
26.6.通过电阻应变器测量出当前实际的瞬时下种率k’,与预期的下种率k相比较,并得到大或者小多少的百分率,如果k’比k大或小不超过10%,则保持原来的开度不变;如果k’比k大或小10%~20%,则第一单片机控制器发送指令使开度变小或者变大10%;如果k’比k大或小20%~30%,则第一单片机控制器发送指令使开度变小或者变大20%;每二至十秒钟监测装置监测一次,然后发送指令调整一次开度;如此循环,不停地监测和不停地调整,就能使瞬时下种率k’保持在预期的下种率k的上、下10%的范围内浮动,从而对于整块田地能保持播种量在s
±
10%公斤/亩的范围内,达到精准播种的目的。
27.本发明还包括蜂鸣警报器,所述蜂鸣警报器与第二单片机控制器电联接;正常情况下所监测的数据一直有小幅度波动,如果持续五秒钟没有一点波动则可能是出现了异常,则要通过蜂鸣警报器发出警报,检查一下是不是对应的料斗出料口被异物堵塞,等排除故障后再继续播种,防止出现漏播现象,避免因没播入种子造成的经济损失。
28.圆弧管做成圆弧形,并且伺服电机输出轴的轴心线和圆弧管的轴心线重合,谷物种子沿着圆弧管内壁下侧光滑的圆弧曲面滑动,没有凹陷之处或者突出之处,即使伺服电机驱动圆弧管突然快速旋转,也不会导致谷物种子突然跌落或者与突起物突然碰撞,避免突然跌落或者突然碰撞产生的突然冲击力作用于电阻应变器而产生附加力矩,确保监测结果的精度。
29.本发明的有益效果是:自动监测播种量,并能给自动放料器提供信息反馈,数据实时更新,为放料闸门开度的动态智能调整提供数据支持;能判断料斗出料口是否被异物堵塞,防止漏播,避免农户的损失;能使电阻应变器自动保持水平,使监测结果没有太大偏差。
附图说明
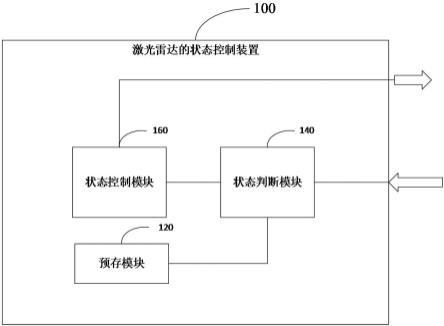
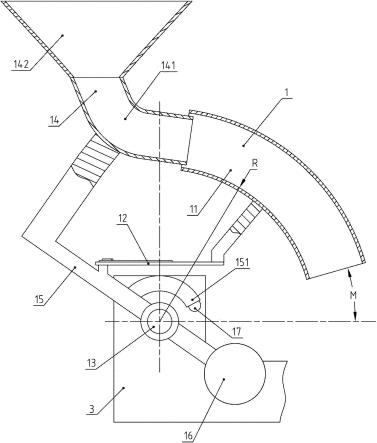
30.图1是本发明实施例1安装在播种机上第一视角的三维结构示意图;图2是本发明实施例1安装在播种机上第二视角的三维结构局部剖视示意图;图3是本发明实施例1的正向局部剖视图;图4是电阻应变器的三维结构示意图;图5是进料管组件的三维结构示意图;图6是电阻信号处理器的电路原理图;图7是本发明实施例1控制系统的控制关系示意图。
31.图中:1-监测装置;11-圆弧管;12-电阻应变器;121-弹性支板;122-电阻应变片;13-伺服电机;14-进料管组件;141-进料管;142-接料漏斗;15-保持支架;151-触发板;16-平衡
锤;17-初位传感器;2-电子水平仪;3-播种框架;31-播种联杆;4-播种犁;5-料斗;51-料斗出料口;6-自动放料器;61-放料闸门;62-电缸;7-电阻信号处理器;71-恒压直流电源;8-第二单片机控制器;9-蜂鸣警报器。
具体实施方式
32.下面将结合实施例及附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例1,一种谷物播种量监测装置,如图1-图7所示,包括监测装置1,所述监测装置1包括圆弧管11、电阻应变器12和保持支架15;所述电阻应变器12水平设置,所述电阻应变器12的第一端和保持支架15固定联接,所述电阻应变器12的第二端和圆弧管11的外轮廓面固定联接;所述圆弧管11的角度小于90度,所述圆弧管11的上端开口朝后上方、下端开口朝前下方,前下方端面与水平面成角度m,角度m在10至20度之间;从后上口装入谷物种子,可以从前下端滑出,滑动期间对圆弧管11的内壁下端有比较稳定的压力。
34.所述的监测装置1还包括伺服电机13,所述伺服电机13的外壳和播种框架3固定联接,所述伺服电机13的输出轴和保持支架15固定联接,所述伺服电机13输出轴的轴心线和圆弧管11的轴心线重合;如图3所示,圆弧管11内壁靠近伺服电机13输出轴的一侧是圆弧形,其半径r在50至200毫米范围内。
35.所述的监测装置1还包括进料管组件14,所述进料管组件14包括进料管141和接料漏斗142;所述进料管141的后上端和接料漏斗142的下端连通,所述进料管141的前下端伸入到圆弧管11的后上端口内,但是进料管141和圆弧管11并不接触,防止两者之间有力的传递而导致监测数据出现偏差;所述接料漏斗142的上端前后方向尺寸较长,左右方向尺寸较窄,位于料斗出料口51正下方,无论开度有多大,无论播种机倾斜到哪个极限位置,谷物种子总能落入接料漏斗142内;所述进料管组件14和保持支架15固定联接,进料管组件14伸入圆弧管11的尺寸长度是确定的,确保所有谷物种子沿着圆弧管11内壁滑动的路径、路径的长度都是相同的。谷物种子连续不断地从比较高的料斗出料口51落下,形成一股松散的、横截面不固定的颗粒流,高度势能转变为下落的动能,落入接料漏斗142、然后又沿着进料管141滑动摩擦一段距离,这期间动能有一部分被缓解,在汇集在进料管141下侧比较窄的一个小范围流动时,相互拥挤,相互阻挡,相互推搡,使颗粒流中大多数谷物种子的线速度趋于相等,都具有近乎相等的动能,颗粒流变得集中,横截面形状也几乎是确定的月牙形,为下一步精确测量提供了条件。
36.以上所述的保持支架15上还固定设置有平衡锤16,使圆弧管11、电阻应变器12、进料管组件14、保持支架15和平衡锤16的组合的重心位于伺服电机13输出轴的轴心线上,防止偏心,防止伺服电机13失步。
37.本实施例还包括电子水平仪2,所述电子水平仪2和播种框架3固定联接,所述电子水平仪2测量其基准面与水平方向在前后方向的倾斜角。
38.本实施例还包括电阻信号处理器7;所述电阻信号处理器7包括四个电阻,分别是第一电阻r1、第二电阻r2、第三电阻r3和第四电阻r4,还包括恒压直流电源71;所述恒压直
流电源71的开路电压是u;所述四个电阻按顺时针方向首尾依次电联接,其中点a是第一电阻r1和第三电阻r3连接导线上的点,b是第二电阻r2和第四电阻r4连接导线上的点,c是第一电阻r1和第二电阻r2连接导线上的点,d是第三电阻r3和第四电阻r4连接导线上的点,如图6所示;其中点a和点b分别联接在恒压直流电源71的正负极两端,在点c和点d之间产生输出电压uo;所述第一电阻r1是指电阻应变器12上的电阻应变片122的电阻;所述第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4和恒压直流电源71组成了电阻应变片悬臂梁电桥电路,输出电压uo和第一电阻r1成正比;当谷物种子落到圆弧管11内,其重力加载在电阻应变器12的第二端时,电阻应变器12发生弹性变形,第一电阻r1的阻值大小发生了应变电阻
△
r1,应变电阻
△
r1的大小和谷物种子的质量大小成正比;于是输出电压uo和压在圆弧管11内壁上的谷物种子的质量成正比,以此测量出瞬间流经圆弧管11内壁的谷物种子的质量,即下种率k,单位是公斤/秒。
39.以行宽为b=0.2米为例进行说明,拖拉机的行走速度为v=1米/秒,播种机上共设置了t=7个播种犁4,一次行程播种的总宽度为1.4米,播种机的播种速度为b*v*t=1.4平方米/秒;一亩田地等于666.7平方米,即f=666.7平方米/亩;播种量的计算公式为:s=k/(b*v*t/f)=f*k/(b*v*t)其中,s-播种量,单位是:公斤/亩;k-下种率,单位是:公斤/秒;f-田地面积单位的换算系数,f=666.7平方米/亩;b-行宽,单位是:米;v-拖拉机的行走速度,单位是:米/秒;t-播种机上共设置播种犁的个数,没有量纲;公式中共五个变量参数,已知任意四个就可以求出剩余的一个。
40.在稻荐田地里种植小麦,如果预期的播种量s=50公斤/亩,则代入以上播种量公式,s=f*k/(b*v*t)50公斤/亩=(666.7平方米/亩)*k/[(0.2米)*(1米/秒)*7]得到下种率k=0.105公斤/秒,只要控制下种率k=0.105公斤/秒,就能以播种量s=50公斤/亩播种小麦。
[0041]
所述保持支架15上还固定设置有圆弧形的触发板151,所述监测装置1还包括初位传感器17,所述初位传感器17安装在播种框架3上,触发板151随着保持支架15转动,触发板151触发初位传感器17。
[0042]
本实施例还包括第二单片机控制器8,所述电阻信号处理器7、电子水平仪2、伺服电机13和初位传感器17分别与第二单片机控制器8电联接,如图7所示;所述第二单片机控制器8和第一单片机控制器相通讯。
[0043]
所述的前方是指拖拉机牵引播种机在田间行走的水平方向,与前方相反的方向是后方,与前后方向相垂直的水平方向是左右方向。
[0044]
本实施例和整个播种机一起工作的过程是这样的。
[0045]
1.初始化校准。使拖拉机操纵播种机向上翻转抬起,会使播种犁4离开地面、悬在
空中,使电子水平仪2的基准面处于水平位置,此时校准电子水平仪2的读数为0度;伺服电机13驱动圆弧管11、电阻应变器12、进料管组件14、保持支架15和平衡锤16的组合旋转至触发板151触发初位传感器17,此时电阻应变器12处于水平状态,通过电阻应变器12采集下种率k的数值,此时由于没有谷物种子从圆弧管11内通过,下种率k数值设定为0公斤/秒。作为悬臂的电阻应变器12,在水平时载荷对它有最大的力矩;相对于水平面倾斜角度n时,即电阻应变器12的第一端和第二端有了高差时,力矩大小会减小为水平状态时的cos(n)倍;为了保持测量的准确性,要不断地通过伺服电机13调整电阻应变器12的角度为水平。所述的cos()是指余弦函数,n=0
°
度时cos(n)有最大值,cos(0
°
)=1。
[0046]
2.预设定播种量s、行宽b、行走速度v和播种机上共设置播种犁的个数t。
[0047]
在稻荐田地里种植小麦,预期的播种量s=50公斤/亩,行宽b=0.2米,行走速度v=米/秒,播种机上共设置播种犁的个数t=7,代入播种量公式得下种率k=0.105公斤/秒。
[0048]
3.拖拉机控制播种机翻转下降,通过智能化方法设定犁入深度和放料闸门61的开度,对应着理论上的下种率k=0.105公斤/秒;但是由于其它很多因素的影响,这时实际的下种率k’和按照理论设定的下种率k相比可能会有偏差。本实施例的监测装置1进入工作状态。料斗5内的谷物种子从料斗出料口51和放料闸门61之间的空间流下,落入下面的接料漏斗142,然后又通过进料管141流入到圆弧管11后上端,沿着圆弧管11靠下侧的壁朝前下方流动,从圆弧管11前下端落入播种犁4的上口,经过播种犁4播入到地面以下。
[0049]
4.电子水平仪检测当前播种机的倾斜角度n,倾斜的方向是前端高、后端低,并把检测信息通过第二单片机控制器8处理后传递给伺服电机13。
[0050]
5.伺服电机13驱动圆弧管11、电阻应变器12、进料管组件14、保持支架15和平衡锤16的组合朝相反的方向旋转角度n,即电阻应变器12的前端向下、后端向上,旋转的最终状态是电阻应变器12保持为水平。
[0051]
6.通过电阻应变器12测量出当前实际的瞬时下种率k’,与预期的下种率k=0.105公斤/秒相比较,并得到大或者小多少的百分率,如果k’比k大或小不超过10%,则保持原来的开度不变;如果k’比k大或小10%~20%,则第一单片机控制器发送指令使开度变小或者变大10%;如果k’比k大或小20%~30%,则第一单片机控制器发送指令使开度变小或者变大20%;每五秒钟监测装置1监测一次,然后发送指令调整一次开度;如此循环,不停地监测和不停地调整,就能使瞬时下种率k’保持在预期的下种率k的上、下10%的范围内浮动,从而对于整块田地能保持播种量在50
±
10%公斤/亩的范围内,达到精准播种的目的。
[0052]
播种量的精准度也可以预先设定,不仅可以设定为s
±
10%公斤/亩,也可以设定为s
±
5%公斤/亩的范围内;监测频率也可以设定,一般情况下每二至十秒钟监测装置1监测一次,可以设定每五秒钟监测一次,也设定为每三秒钟监测一次,间隔时间短则播种得更精准。
[0053]
本实施例还包括蜂鸣警报器9,所述蜂鸣警报器9与第二单片机控制器8电联接;正常情况下所监测的数据一直有小幅度波动,如果持续五秒钟没有一点波动则可能是出现了异常,则要通过蜂鸣警报器9发出警报,检查一下是不是对应的料斗出料口51被异物堵塞,等排除故障后再继续播种,防止出现漏播现象,避免因没播入种子造成的经济损失。
[0054]
圆弧管11做成圆弧形,并且伺服电机13输出轴的轴心线和圆弧管11的轴心线重合,谷物种子沿着圆弧管11内壁下侧光滑的圆弧曲面滑动,没有凹陷之处或者突出之处,即
使伺服电机13驱动圆弧管11突然快速旋转,也不会导致谷物种子突然跌落或者与突起物突然碰撞,始终做稳定的圆周运动,避免突然跌落或者突然碰撞产生的突然冲击力反作用于电阻应变器12而产生附加力矩,确保监测结果的精度。
[0055]
监测装置1也可以不使用:由电子水平仪2提供倾斜信号、由伺服电机13驱动旋转从而使电阻应变器12保持水平的方案,另一种代替方案是:在保持支架15的旋转中心下面设置一个较重的重锤,无论播种框架3怎么倾斜重锤都朝下,电阻应变器12水平地设置在保持支架15上。但是这种方案无法避免重锤的前后摇摆,使得采集数据里面混入一个正弦波的成分,使采集数据不准确,所以不是最佳方案,本实施例的方案比较好。
[0056]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的范围。这样,倘若本发明的这些修改和变型属于本发明及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。