1.本发明涉及成膜装置、基板传送装置、基板传送方法及电子器件的制造方法。
背景技术:
2.作为有机el显示器等的制造设备,已知有向成膜室传送基板而进行对基板的成膜的装置。作为一例,专利文献1公开了通过多关节机器人从共同的传送室向多个成膜室传送基板的群集型的成膜装置。
3.【现有技术文献】
4.【专利文献】
5.【专利文献1】日本特开2019-192898号公报
技术实现要素:
6.【发明要解决的课题】
7.伴随着基板的大型化,基板的传送距离增加。在通过单一的多关节机器人传送基板的方式中,由于对机器人要求的耐载荷的增加等原因,有时无法应对基板的传送距离的增加。
8.本发明提供一种能够应对基板的大型化的技术。
9.【用于解决课题的方案】
10.根据本发明的一方面,提供一种成膜装置,其特征在于,
11.所述成膜装置具备:
12.成膜室,所述成膜室对基板进行成膜;
13.第一传送机构,所述第一传送机构传送基板;及
14.第二传送机构,所述第二传送机构将在第一位置从所述第一传送机构接收到的基板向第二位置传送,
15.所述第二传送机构在支承有基板的状态下旋转,由此以使基板在所述第二位置成为进行成膜时的朝向的方式传送基板。
16.另外,根据本发明的另一方面,提供一种基板传送装置,其特征在于,
17.所述基板传送装置具备:
18.第一传送机构,所述第一传送机构传送基板;及
19.第二传送机构,所述第二传送机构将在第一位置从所述第一传送机构接收到的基板向第二位置传送,
20.所述第二传送机构在支承有基板的状态下旋转,由此以使基板在所述第二位置成为作为传送目的地的成膜室内的朝向的方式传送基板。
21.另外,根据本发明的另一方面,提供一种基板传送方法,其特征在于,
22.所述基板传送方法包括:
23.传送基板的第一传送工序;及
24.将在第一位置接收到的由所述第一传送工序传送的基板向第二位置传送的第二传送工序,
25.在所述第二传送工序中,在支承有基板的状态下旋转,由此以使基板在所述第二位置成为进行成膜时的朝向的方式传送基板。
26.另外,根据本发明的另一方面,提供一种电子器件的制造方法,其特征在于,
27.所述电子器件的制造方法包括:
28.通过上述的基板传送方法传送基板的传送工序;及
29.对由所述传送工序传送的基板进行成膜的成膜工序。
30.【发明效果】
31.根据本发明,能够提供一种能够应对基板的大型化的技术。
附图说明
32.图1是成膜装置的布局图。
33.图2(a)及图2(b)分别是交接室的传送单元的俯视图及侧视图。
34.图3(a)及图3(b)分别是旋转室的传送单元的俯视图及侧视图。
35.图4是表示滑动式的传送单元的概要的俯视图。
36.图5是图4的传送单元的剖视图。
37.图6(a)~图6(c)是基板的交接动作的说明图。
38.图7(a)~图7(c)是基板的交接动作的说明图。
39.图8(a)~图8(b)是基板的交接动作的说明图。
40.图9(a)~图9(c)是基板的交接动作的说明图。
41.图10(a)~图10(f)是蒸镀源的移动的说明图。
42.图11(a)及图11(b)是掩模的向掩模台的传送动作的说明图。
43.图12(a)及图12(b)是掩模的向掩模台的传送动作的说明图。
44.图13(a)及图13(b)是基板的传送动作及对准动作的说明图。
45.图14(a)及图14(b)是对基板的成膜动作的说明图。
46.图15(a)~图15(c)是表示成膜装置整体的动作例的说明图。
47.图16(a)~图16(c)是表示成膜装置整体的动作例的说明图。
48.图17(a)~图17(c)是表示成膜装置整体的动作例的说明图。
49.图18(a)及图18(b)是表示成膜装置整体的动作例的说明图。
50.图19是另一实施方式的成膜装置的俯视图。
51.图20是图19的成膜装置的成膜室的侧视图。
52.图21(a)~图21(c)是另一蒸发源及其移动单元的说明图。
53.图22是保持单元的另一构成例的说明图。
54.图23(a)是有机el显示装置的整体图,图23(b)是表示一个像素的剖面结构的图。
55.【附图标记说明】
56.1:成膜装置,3:成膜室,20:传送单元,40:传送单元,w:基板,m:掩模
具体实施方式
57.以下,参照附图详细说明实施方式。需要说明的是,以下的实施方式没有限定权利要求书的发明。在实施方式中记载有多个特征,但是这些多个特征并非全部对发明来说是必须的特征,而且,多个特征可以任意组合。此外,在附图中,对于相同或同样的结构标注同一参照编号,省略重复的说明。
58.《第一实施方式》
59.《成膜装置的构成例》
60.(成膜装置的概要)
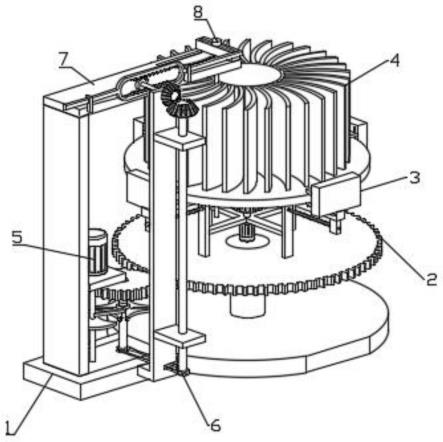
61.图1是成膜装置1的布局图。需要说明的是,在各图中,箭头z表示上下方向(重力方向),箭头x及箭头y表示相互正交的水平方向。箭头θ表示绕z轴的旋转方向。而且,对于图中示出多个的元件,有时仅对代表性的元件标注附图标记。
62.成膜装置1是对基板w进行成膜的装置。对基板w使用掩模m能够形成规定图案的蒸镀物质的薄膜。基板w的材质可以适当选择玻璃、树脂、金属等材料,代表性地使用在玻璃上形成有聚酰亚胺等的树脂层的材料。在本实施方式的情况下,基板w为矩形。作为蒸镀物质,为有机材料、无机材料(金属、金属氧化物等)等物质。成膜装置1能够适用于制造例如显示装置(平板显示器等)、薄膜太阳能电池、有机光电转换元件(有机薄膜拍摄元件)等电子器件、光学构件等的制造装置,特别是能够适用于制造有机el面板的制造装置。
63.构成电子器件的制造生产线的成膜装置1拾取在制造生产线整体的传送生产线l中流动的基板w,在实施了成膜等规定处理的基础上使基板w再次返回传送生产线l。在电子器件的制造生产线中,可将这样的成膜装置1沿着传送生产线l配置多个。
64.成膜装置1是将交接室2、旋转室4及成膜室3沿y方向排列的结构,将基板w以该顺序传送并进行处理。详细而言,当交接室2内的传送单元20从设置在传送生产线l上且顺次传送基板w的生产线传送室l1接收基板w时,将该基板w经由旋转室4向成膜室3传送而进行成膜处理。而且,控制装置103具备cpu等处理器、半导体存储器或硬盘等存储器件、以及输入输出接口,对成膜系统1进行控制。
65.(交接室)
66.交接室2除了生产线传送室l1与旋转室4之间的基板w、掩模m的交接之外,还进行对处于旋转室4的前方的成膜室3的基板w、掩模m的分配。因此,交接室2也可以称为分类室。交接室2由壁部29保持为气密。
67.在交接室2设有传送单元20。图2(a)及图2(b)分别是传送单元20的俯视图及侧视图。传送单元20是双臂型的机器人。传送单元20包括:由臂21a、臂21b及手21c构成的传送基板w的基板传送部21;由臂22a、臂22b及手22c构成的传送掩模m的掩模传送部22。基板传送部21及掩模传送部22能够进行由基体部20a具有的驱动轴20b的θ方向的旋转产生的绕z轴的回旋以及由转动轴21d及22d的上下移动产生的升降。手21c及22c具有叉形状,分别载置基板m及掩模m。而且,与交接室2相邻地设置有收容掩模m的储料器104。传送单元20使用掩模传送部22,将储料器104收容的掩模m向旋转室4传送,或者将从旋转室4接收的掩模m向储料器104传送。
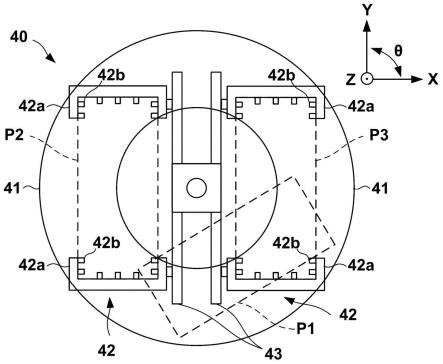
68.在本实施方式中,基板传送部21构成为能够通过臂21a及21b而使手21c沿径向(以驱动轴20b为轴向时的圆筒坐标系的径向)移动。而且,掩模传送部22构成为能够通过臂22a
及22b而使手22c沿上述径向移动。因此,当包含驱动轴20b的旋转及转动轴21d的升降时,传送单元20是能够进行绕铅垂方向的轴的旋转、铅垂方向的位移及径向的位移的三自由度的圆筒坐标型的机器人。不过,传送单元20的结构可以适当变更。
69.(旋转室)
70.旋转室4从交接室2的传送单元20接收基板w,将基板w一边改变其朝向一边传送而向后述的传送单元5a或5b交接。在本实施方式中,两个旋转室4沿x方向并列设置,交接室2的传送单元20对于这些旋转室4分配基板w。旋转室4由壁部49包围而能够维持为气密。
71.参照图1、图3(a)及图3(b)。图3(a)及图3(b)分别是传送单元40的俯视图及侧视图。传送单元40设置于旋转室4,在支承有基板w的状态下通过旋转而传送基板w。传送单元40包括基体部41、支承基板w的两个基板支承部42、以及支承掩模m的掩模支承部43。基板支承部42及掩模支承部43进行由基体部41具有的驱动轴41a的θ方向的旋转产生的绕z轴的回旋、以及由驱动轴41a的上下移动产生的升降。即,传送单元40具有绕铅垂方向的轴的旋转及铅垂方向的位移的两自由度的机构。基板支承部42包括:支承于掩模支承部43的一对框构件42a;以及从框构件42a延伸并从下方支承基板w的多个承受爪42b。以承受爪42b支承基板w的两短边的附近的方式将一对框构件42a分离设置,由此,在将基板w载置于承受爪42b时能够避免传送单元20的手21c与框构件42a的干涉。而且,掩模支承部43由能够载置掩模m的两根长的板状的构件构成。
72.另外,在本实施方式中,传送单元40当在位置p1(位置p4)从传送单元20接收基板w时,在支承有该基板w的状态下通过旋转而向位置p2(位置p5)或位置p3(位置p6)传送,详情在后文叙述。由此,能够将在位置p1接收的基板w一边改变其朝向一边传送。
73.(成膜室)
74.再次参照图1。成膜室3对于由后述的传送单元5a及5b送入的基板w进行成膜。在本实施方式中,两个成膜室3沿x方向并列设置,各成膜室3连接于两个旋转室4中的任一个。成膜室3由壁部39包围而能够维持为气密。
75.在本实施方式中,在两个成膜室3分别配置两个掩模台31。通过合计四个掩模台31来规定进行蒸镀处理的蒸镀位置ja~jd。两个成膜室3的结构相同。在各成膜室3设置有蒸镀源8和使蒸镀源8移动的移动单元9。关于蒸镀源8和移动单元9的具体的结构及动作在后文叙述。
76.(滑动式的传送单元)
77.如图1所示,成膜装置1具备从旋转室4至成膜室3配置的两组传送单元5a及5b。传送单元5a具备保持单元6a和使保持单元6a沿y方向平行移动的移动单元7a(滑动部)。传送单元5b是与传送单元5a同样的结构,具备保持单元6b和使保持单元6b沿y方向平行移动的移动单元7b。
78.图4是表示传送单元5a及5b的概要的俯视图,图5示出传送单元5a(移动单元7a及保持单元6a)的剖视图。传送单元5a及5b是在比传送单元40高的位置使保持单元6a及6b以水平姿势沿y方向独立往复的单元,沿x方向并列设置。需要说明的是,图5代表性地示出传送单元5a(移动单元7a及保持单元6a)的结构,但是保持单元6a及6b具有相同结构,移动单元7a及7b也具有相同结构。
79.本实施方式的移动单元7a及7b是通过磁力使保持单元6a及6b移动的机构,特别是
通过磁力进行上浮移动的机构。移动单元7a及7b分别具备对保持单元6a及6b的y方向的移动轨道进行规定的一对引导构件70。各引导构件70是具有c字型的截面,沿y方向延伸设置的轨道构件。一对引导构件70相互沿x方向分离。
80.各引导构件70具备多个沿z方向分离的一对磁力元件71。多个一对磁力元件71沿y方向以等间距排列。一对磁力元件71中的至少一方为电磁铁,另一方为电磁铁或永久磁铁。
81.保持单元6a及6b是用于传送基板w、掩模m的载体。保持单元6a及6b分别具备在俯视观察下为矩形形状的主体构件60。主体构件60的x方向的各端部插入于对应的引导构件70。在主体构件60的x方向的各端部的上表面、下表面分别固定有设有未图示的磁轭的永久磁铁61。上下的永久磁铁61在主体构件60沿y方向设置多个。永久磁铁61与引导构件70的磁力元件71相向。通过永久磁铁61与磁力元件71的斥力能够使保持单元6a及6b产生上浮力。通过顺次切换沿y方向设置有多个的磁力元件(电磁铁)71中的产生磁力的磁力元件71,能够利用永久磁铁61与磁力元件71的吸引力使保持单元6a及6b产生y方向的移动力。
82.需要说明的是,在本实施方式中,将移动单元7a及7b设为磁力上浮传送机构,但也可以是辊传送机构、带传送机构、齿条齿轮机构等能够使保持单元6a及6b移动的其他传送机构。
83.在引导构件70配置有沿y方向延伸设置的标度72,在主体构件60设有读取标度72的传感器64。通过传感器64的检测结果,能够确定各保持单元6a及6b的y方向的位置。
84.保持单元6a及6b分别具备保持基板w的保持部62。在本实施方式的情况下,保持部62是通过静电力吸附基板w的静电卡盘,保持部62包括配置于保持单元6a及6b的下表面的多个电极62a。保持单元6a及6b还分别具备保持掩模m的保持部63。保持部63例如是通过磁力吸附掩模m的磁铁卡盘,在保持部62的x方向上位于外侧。保持部63也可以是机械地夹持掩模m的夹紧机构。
85.《成膜装置的动作例》
86.(从交接室向旋转室的基板的交接动作)
87.图6(a)~图6(c)是用于说明从交接室2向旋转室4的基板w的交接动作的俯视图,图7(a)~图7(c)是图6(a)~图6(c)的a方向的向视图。图6(a)及图7(a)示出交接室2的传送单元20在生产线传送室l1接收了基板w之后,通过臂21a、21b一边将手21c向旋转中心侧拉拽一边绕z轴回旋而朝向旋转室4的状态。此时,旋转室4的传送单元40使基板支承部42移动到与位置p1对应的位置进行待机,以能够在位置p1接收基板w。从该状态开始,通过基板传送部21将基板w向位置p1传送(图6(b)及图7(b))。此时,在z方向上,基板传送部21的手21c对基板w的支承位置相比基板支承部42的承受爪42b对基板的支承位置位于上方。然后,从该状态开始传送单元20的转动轴21d下降,由此将手21c支承的基板w向基板支承部42交接(图6(c)及图7(c))。
88.需要说明的是,在此虽然说明了基板w的交接,但是关于掩模m的交接也通过同样的动作进行。在该情况下,传送单元20取代基板传送部21而通过掩模传送部22传送掩模m,传送单元40取代基板支承部42而通过掩模支承部43接收掩模m。
89.(从旋转室向成膜室的基板的交接动作)
90.图8(a)~图8(b)及图9(a)~图9(c)是用于说明从旋转室4向成膜室3的基板w的交接动作的俯视图及侧视图。旋转室4的传送单元20当在位置p1从传送单元20接收基板w时
(图6(c)),通过驱动轴41a绕z轴旋转,将基板w传送至位置p2(图8(a)及图9(a))。此时,传送单元5a使保持单元6a移动到位置p2进行待机,以能够在位置p2接收基板w。而且,此时,在z方向上,基板支承部42的承受爪42b对板w的支承位置相比保持单元6a对基板w的保持位置位于下方。从该状态开始,传送单元40使基体部41的驱动轴41a向上方移动而使由基板支承部42支承的基板w与保持单元6a的保持部62接触(图9(b))。保持单元6a通过静电力吸附并保持基板w。当通过保持单元6a保持基板w时,传送单元40使驱动轴41a向下方移动而使基板支承部42从基板w分离(图9(c)),之后,传送单元5a使保持单元6a向成膜室3的蒸镀位置ja平行移动(图8(b))。
91.需要说明的是,在此虽然说明了使用传送单元5a的动作例,但是使用传送单元5b的情况也通过同样的动作进行。在该情况下,传送单元40将从传送单元20接收的基板w不是向位置p2而是向位置p3传送。
92.(蒸发源及移动单元的结构及动作)
93.图10(a)~图10(f)是说明成膜室3的蒸镀源8及移动单元9的结构及动作的图。蒸镀源8具备收容蒸镀物质的原材料的坩埚、对坩埚进行加热的加热器等,对原材料进行加热而将作为其蒸气的蒸镀物质从开口部8a(参照图10(a)等)向上方放出。
94.移动单元9具备促动器90、一对可动轨道94、以及一对固定轨道95。促动器90具备驱动源93、臂构件91、以及臂构件92。臂构件91的一端连结于驱动源93,通过驱动源93而回旋。臂构件91的另一端转动自如地连结于臂构件92的一端,臂构件92的另一端转动自如地连结于蒸镀源8的底部。
95.一对可动轨道94引导蒸镀源8的y方向的移动。各可动轨道94沿y方向延伸设置,一对可动轨道94相互沿x方向分离。一对固定轨道95引导一对可动轨道94的x方向的移动。各固定轨道95固定成不能移动,沿y方向延伸设置。一对固定轨道95相互沿y方向分离。
96.通过促动器90的驱动,蒸镀源8在蒸镀位置ja的下方(掩模台31的下方)沿y方向滑动,而且,从蒸镀位置ja侧向蒸镀位置jb侧滑动,进而,在蒸镀位置jb的下方(掩模台31的下方)沿y方向滑动。具体而言,当从图10(a)的位置开始通过促动器90的驱动使臂构件91及92回旋时,如图10(b)所示,蒸镀源8由于一对可动轨道94的引导而沿y方向通过蒸镀位置ja的下方。当从该状态开始通过促动器90的驱动使臂构件91及92反方向回旋时,如图10(c)所示,蒸镀源8沿y方向通过蒸镀位置ja的下方而返回图10(a)的位置。
97.当通过促动器90的驱动使臂构件91及92进一步回旋时,蒸镀源8及一对可动轨道94按照一对固定轨道95的引导向蒸镀位置jb侧沿x方向移动。当从图10(d)的位置开始通过促动器90的驱动使臂构件91及92进一步回旋时,如图10(e)所示蒸镀源8通过一对可动轨道94的引导而沿y方向通过蒸镀位置jb的下方。当从该状态开始通过促动器90的驱动使臂构件91及92反方向回旋时,如图10(f)所示,蒸镀源8沿y方向通过蒸镀位置jb的下方而返回图10(d)的位置。
98.这样,在本实施方式中,通过使一个蒸镀源8移动,能够在蒸镀位置ja和蒸镀位置jb这两个蒸镀位置共用蒸镀源8。
99.(对准动作及成膜动作)
100.接下来,参照图11(a)~图14(b),说明掩模m向掩模台31的搭载、掩模m与基板w的对位(对准)动作、及之后的成膜动作。
101.首先,说明将掩模m向掩模台31搭载的动作。图11(a)~图12(b)示出在蒸镀位置ja将掩模m向掩模台31搭载的动作。从图11(a)的状态开始,保持有掩模m的保持单元6a通过移动单元7a移动到掩模台31上。当如图12(a)所示掩模m到达掩模台31上的规定位置时,如图12(b)所示调节移动单元7a的磁力元件71的磁力而降低保持单元6a的上浮量,解除保持单元6a对掩模m的保持。由此在掩模台31上搭载掩模m。
102.接下来,说明对准动作及成膜动作。图13(a)示出保持有基板w的保持单元6a通过移动单元7a移动到蒸镀位置ja的状态。当基板w到达掩模m的上方时,进行基板w与掩模m的x-y平面上的对准。在对准中,如图13(b)所示,通过相机32拍摄基板w和掩模m上分别附带的对准标记,根据该拍摄图像来运算基板w与掩模m的位置偏离量。然后,以使运算出的位置偏离量减少的方式调整基板w的位置。在本实施方式的情况下,基板w的位置调整通过调节移动单元7a的磁力元件71的磁力进行。通过调整沿x方向、y方向分离的各磁力元件71的磁力,能够使保持单元6a的位置沿x方向、y方向、θ方向位移,由此能够使保持单元6a保持的基板w的x方向、y方向、θ方向的位置位移。例如,如果增强在一对引导构件70中的一方的引导构件70上设置的磁力元件71的磁力,则能够通过磁力的吸引使保持单元6a及基板w向一方的引导构件70侧(或者通过磁力的排斥而向另一方的引导构件70侧)位移。
103.基于相机32的拍摄、基于磁力元件71的磁力调整的基板w与掩模m的对准可以反复进行至两者的位置偏离量成为容许范围内为止。当对准完成时,如图14(a)所示调节移动单元7a的磁力元件71的磁力而降低保持单元6a的上浮量,将基板w重叠在掩模m上。保持单元6a对基板w的保持未解除。接下来进行成膜动作。如图14(b)所示使蒸镀源8移动,并从蒸镀源8将蒸镀物质向基板w放出。在基板w形成通过了掩模m的蒸镀物质的膜。在成膜过程中,维持基板w由保持单元6a保持的状态。
104.(成膜装置整体的动作例)
105.图15(a)~图18(b)是用于说明在成膜装置1中对多个基板w连续进行成膜时的动作例的图。各图所示的状态下的各装置的动作遵照例如图6(a)~图14(b)所示的动作例。需要说明的是,在此,在动作开始时,掩模m已经被送入各蒸镀位置ja~jd的掩模台31。而且,以下,将两个成膜室3区别地标记为成膜室3l、成膜室3r,将两个旋转室4区别地标记为旋转室4l、旋转室4r。它们的构成元件也同样。
106.如图15(a)所示,传送单元20接收向生产线传送室l1传送来的第一张基板w。
107.如图15(b)所示,传送单元20将接收到的基板w向旋转室4l的位置p1传送。此时,旋转室4l的传送单元40l在传送单元20向位置p1传送来基板w之前,在位置p1处预先使基板支承部42l旋转移动到能够接收基板w的位置进行待机。并且,当通过传送单元20将基板w传送到位置p1时,传送单元40l从传送单元20接收基板w。
108.如图15(c)所示,传送单元40使在位置p1处接收的基板w移动至位置p2。传送单元40l在位置p2处将基板w向保持单元6al交接。而且,与这些动作并行地,传送单元20接收向生产线传送室l1传送来的第二张基板w。
109.如图16(a)所示,传送单元20将接收到的基板w向旋转室4r的位置p4传送。此时,旋转室4r的传送单元40r在传送单元20向位置p1传送来基板w之前,在位置p4处预先使基板支承部42r旋转移动到能够接收基板w的位置进行待机。并且,当通过传送单元20将基板w传送到位置p4时,传送单元40r从传送单元20接收基板w。而且,与这些动作并行地,传送单元5al
使通过保持单元6al保持的基板w从位置p2向蒸镀位置ja移动。然后,进行基板w与掩模m的对准。
110.如图16(b)所示,传送单元20将第三张基板w向旋转室4l的位置p1传送。详细而言,传送单元20从图16(a)所示的状态开始使基板传送部21向生产线传送室l1移动而接收第三张基板w,将接收到的基板w向位置p1传送。并且,传送单元20向在位置p1以能够接收基板w的状态待机的传送单元40l交接基板w。而且,与这些动作并行地,在成膜室3l中,对处于蒸镀位置ja的基板w进行基于蒸镀源8的成膜。而且,旋转室4r的传送单元40r将在位置p4接收到的基板w传送至位置p5。并且,当在位置p5从传送单元40r向保持单元6ar交接基板w时,传送单元5ar使通过保持单元6ar保持的基板w从位置p5向蒸镀位置jc移动。然后,进行基板w与掩模m的对准。
111.如图16(c)所示,传送单元20将第四张基板w向旋转室4r的位置p4传送。详细而言,传送单元20从图16(b)所示的状态开始使基板传送部21向生产线传送室l1移动而接收第四张基板w,将接收到的基板w向位置p4传送。并且,传送单元20向在位置p4以能够接收基板w的状态待机的传送单元40r交接基板w。而且,与这些动作并行地,在成膜室3l中,对处于蒸镀位置ja的基板w继续进行基于蒸镀源8l的成膜。而且,旋转室4l的传送单元40l将在位置p1接收到的基板w传送至位置p3。并且,当在位置p3处从传送单元40l向保持单元6bl交接基板w时,传送单元5bl使由保持单元6bl保持的基板w从位置p2向蒸镀位置jb移动。然后,进行基板w与掩模m的对准。此外,在成膜室3r中,对处于蒸镀位置jc的基板w进行基于蒸镀源8r的成膜。
112.如图17(a)所示,传送单元20将第五张基板w向旋转室4l的位置p1传送。详细而言,传送单元20从图16(c)所示的状态开始使基板传送部21向生产线传送室l1移动而接收第五张基板w,将接收到的基板w向位置p1传送。并且,传送单元20向在位置p1处以能够接收基板w的状态待机的传送单元40l交接基板w。而且,与这些动作并行地,在成膜室3l中,结束了对处于蒸镀位置ja的基板w的成膜的蒸镀源8l为了对处于蒸镀位置jb的基板w进行成膜而沿x方向移动。而且,传送单元5al使保持有结束了成膜的基板w的保持单元6al向旋转室4l移动。而且,在成膜室3r中,继续进行基于蒸镀源8r的成膜。而且,旋转室4r的传送单元40r将在位置p4接收到的基板w传送至位置p6。并且,当在位置p6处从传送单元40r向保持单元6br交接基板w时,传送单元5br使通过保持单元6br保持的基板w从位置p6向蒸镀位置jd移动。然后,进行基板w与掩模m的对准。
113.如图17(b)所示,传送单元20在生产线传送室l1中接收第六张基板w。与该动作并行地,传送单元5al使保持有结束了成膜的第一张基板w的保持单元6al向旋转室4l内的位置p2移动。并且,传送单元40l通过不是支承第五张基板w的基板支承部42l的基板支承部42,从保持单元6al接收第一张基板w。而且,在成膜室3r中,结束了对处于蒸镀位置jc的基板w的成膜的蒸镀源8r为了对处于蒸镀位置jd的基板w进行成膜而沿x方向移动。而且,传送单元5ar使保持有结束了成膜的基板w的保持单元6ar向旋转室4r移动。
114.如图17(c)所示,传送单元20将第六张基板w向旋转室4r的位置p4传送,向在位置p3处以能够接收基板w的状态待机的传送单元40r交接基板w。与该动作并行地,在成膜室3l中,蒸镀源8l对处于蒸镀位置jb的基板w进行成膜。而且,在旋转室4l中,传送单元40l将第五张基板w向位置p2传送。即,第五张基板w从位置p1经由位置p3向位置p2传送。在位置p2
处,将基板w从传送单元40l向保持单元6al交接。而且,在成膜室3r中,蒸镀源8r对处于蒸镀位置jd的基板w进行成膜。
115.如图18(a)所示,传送单元20从传送单元40l接收结束了成膜的第一张基板w。与该动作并行地,传送单元5ar使保持有结束了成膜的第二张基板w的保持单元6ar向旋转室4r内的位置p5移动。并且,传送单元40r通过不是支承第六张基板w的基板支承部42l的基板支承部42,从保持单元6ar接收第一张基板w。而且,继续进行蒸镀源8l对成膜室3l中的处于蒸镀位置jb的基板w的成膜及蒸镀源8r对成膜室3r中的处于蒸镀位置jd的基板w的成膜。
116.如图18(b)所示,传送单元20将结束了成膜的第一张基板w向生产线传送室l1交接。即,结束成膜,在旋转室4r中,传送单元40r将第六张基板w向位置p5传送。即,第六张基板w从位置p4经由位置p6向位置p5传送。在位置p5处,将基板w从传送单元40r向保持单元6ar交接。而且,继续进行蒸镀源8l对成膜室3l中的处于蒸镀位置jb的基板w的成膜及蒸镀源8r对成膜室3r中的处于蒸镀位置jd的基板w的成膜。
117.成膜装置1通过反复进行如以上所述基板w的送入、向送入的基板w的成膜、结束了成膜的基板w的送出这样的次序而能够对多个基板w顺次进行成膜。
118.根据本实施方式,成膜装置1通过传送单元20、传送单元40及传送单元5a、5b的并用来进行从生产线传送室l1向蒸镀位置ja~jd的基板w、掩模m的传送。进而言之,传送单元5a、5b接收到基板w、掩模m为止的传送通过传送单元20及传送单元40进行。由此,与通过多关节机器人等单一的传送机构进行该区间的传送相比,能够缩短各传送单元的传送距离,并以更长的距离传送基板w。在传送大型的基板w时,能够实现长的传送距离,并且能够防止各传送单元为了高刚性化而大型化的情况。因此,能够提供一种能够应对基板w的大型化的成膜装置1。
119.特别是在本实施方式中,传送单元40在支承有从传送单元20接收的基板w的状态下旋转,由此,以基板w成为成膜时的朝向的方式将基板w传送至向传送单元5a、5b交接基板w的交接位置。因此,传送单元20不需要对应于成膜室3中的基板w的朝向来调整基板w的朝向。由此,能够简化传送单元20的结构。进而言之,在本实施方式中,传送单元20由三自由度的机器人构成,与使用四自由度以上的多关节机器人等的情况相比,能够降低传送机构的自由度。通过采用自由度更低的机构,在以同等的尺寸进行比较的情况下,与多自由度的机器人相比基板w、掩模m的支承刚性升高,因此也容易应对基板w的大型化。
120.另外,在本实施方式中,传送单元40是两自由度的传送机构。因此,通过自由度比较低的机构即传送单元20与传送单元40的组合,能够将基板w传送得更远并且也能调整基板w的朝向,因此与通过单一的传送机构一边调整基板w的朝向一边传送基板w的情况相比,对于基板w的大型化的应对变得容易。
121.另外,由于通过传送单元40调整基板w的朝向,因此传送单元5a、5b不用调整基板w的朝向而只要使基板w平行移动至蒸镀位置ja~jd即可。由此,能够简化传送单元5a、5b的结构。
122.另外,在本实施方式中,传送单元40旋转,由此,以使基板w的朝向在用于将基板w向蒸镀位置ja传送的位置p2与用于将基板w向蒸镀位置jb传送的位置p3成为相同的方式传送基板w。因此,传送单元5a、5b使处于位置p2或位置p3的基板w直接滑动,由此将两张基板w配置在成膜室3内的沿x方向分离的两个蒸镀位置ja及蒸镀位置jb。由此,通过能够一边沿y
方向移动(扫描)一边对基板w成膜并能够沿x方向移动的蒸镀源8,能够对两个成膜位置的基板w进行成膜。而且例如,在蒸镀源8对处于蒸镀位置ja的基板w进行成膜期间进行处于蒸镀位置jb的基板w的对准,由此,在向处于蒸镀位置ja的基板w的成膜的结束后能够快速地对处于蒸镀位置jb的基板w进行成膜。因此,能够提高成膜工艺的效率。
123.《第二实施方式》
124.在第一实施方式中,设为传送单元5a、5b将传送单元40从位置p1传送到位置p2或位置p3的基板w传送至蒸镀位置ja、jb的结构,但也可以是不设置传送单元5a、5b的结构。即,可以是位置p2或位置p3成为蒸镀位置的结构。图19及图20是表示其一例的成膜装置201的俯视图及成膜室203的侧视图。以下,关于与第一实施方式同样的结构,标注同样的附图标记而省略说明。
125.在本实施方式中,在对基板w进行成膜的成膜室203设有通过在支承有基板w的状态下旋转而传送基板w的传送单元240。传送单元240设置在成膜室203的内部空间的上部区域。传送单元240包括:在划定成膜室203的上表面的壁部239上支承的基体部241;对基板w进行支承的两个基板支承部242;以及对掩模m进行支承的两个掩模支承部243。基板支承部242及掩模支承部243进行由基体部241具有的驱动轴241a的θ方向的旋转产生的绕z轴的回旋、由驱动轴241a的上下移动产生的升降。而且,本实施方式的基板支承部242及掩模支承部243将基板w及掩模m分别保持在下侧进行传送。例如,基板支承部242可以是利用静电力进行吸附的静电卡盘,也可以是掩模支承部243通过磁力来支承掩模m。
126.另外,在成膜室203中,在传送单元240的下方设置有对基板w进行支承的基板支承部250和对掩模m进行支承的掩模支承部251。关于这些结构,可以适当应用公知的技术,但是例如也可以通过承受爪、夹紧件等支承基板w或掩模m的边缘。而且,基板支承部250及掩模支承部251也可以构成为能够沿水平方向相对移动而执行基板w与掩模m的对准。
127.另外,在成膜室203中,在基板支承部250及掩模支承部251的下方设置对基板w进行成膜的蒸镀源8。
128.以下,说明成膜装置201中的基板w的传送动作。传送单元20当在生产线传送室l1中接收基板w时,向成膜室203内的位置p21传送基板w。并且,传送单元20向在位置p21处以能够接收基板w的状态待机的传送单元240交接基板w。例如,通过传送单元20使其转动轴21d向上方移动而将基板w向上方抬起,或者通过传送单元240使其驱动轴241a向下方移动而降低基板支承部242,或者通过这两方来进行交接。
129.接收到基板w的传送单元240通过绕z轴旋转而将基板w从位置p21传送至位置p22(图20)。然后,传送单元240使其驱动轴241a向下方移动而降低基板支承部242,由此将基板w向基板支承部250交接。
130.如以上说明所述,在本实施方式中,通过传送单元20及传送单元240,能够一边调节基板w的朝向,一边将基板w传送至成膜室203内的成膜位置。即使在这样的形态中,与通过多关节机器人等单一的传送机构进行该区间的传送相比,也能够缩短各传送单元的传送距离,并以更长的距离传送基板w。在传送大型的基板w时,能够实现长传送距离,并防止各传送单元为了高刚性化而大型化的情况。因此,能够提供一种能够应对基板w的大型化的成膜装置1。
131.《第三实施方式》
132.在第一实施方式中,设为能够使蒸镀源8沿x方向和y方向这双方移动的结构,但也可以是能够仅沿x方向移动的结构。图21(a)~图21(c)示出其一例,例示蒸镀位置ja、jb处的结构。关于蒸镀位置jc、jd也可以采用同样的结构。
133.取代蒸镀源8的蒸镀源8’具有沿y方向细长的方式,放出蒸镀物质的开口部8a’具有与蒸镀位置ja、jb的y方向的长度对应的长度。取代移动单元9的移动单元9’具有一对固定轨道96。各固定轨道96沿x方向延伸设置,一对固定轨道96相互沿y方向分离。移动单元9’具有相当于促动器90的未图示的促动器。
134.如图21(a)所示,蒸镀源8’在将蒸镀位置ja与蒸镀位置jb之间的位置设为待机位置,并在蒸镀位置ja处对基板w进行成膜的情况下,如图21(b)所示沿x方向横穿蒸镀位置ja。而且,在蒸镀位置jb处对基板w进行成膜的情况下,如图21(c)所示沿x方向横穿蒸镀位置jb。根据本实施方式,能够将移动单元9’的机构设为比较简单的机构。
135.《第四实施方式》
136.在第一实施方式中,通过静电卡盘构成保持基板w的保持部62,但也可以是其他的吸附方式。图22示出其一例,并示出保持部62的下表面。在保持部62的下表面设有多个吸附垫65。吸附垫65是例如通过粘着力来保持基板w的粘着构件。或着吸附垫65是真空垫。
137.《电子器件的制造方法》
138.接下来,说明电子器件的制造方法的一例。以下,作为电子器件的例子而例示有机el显示装置的结构及制造方法。在该例的情况下,图1例示的成膜装置1在制造生产线上设置多个。
139.首先,说明制造的有机el显示装置。图23(a)是有机el显示装置50的整体图,图23(b)是表示一个像素的剖面结构的图。
140.如图23(a)所示,具备多个发光元件的像素52在有机el显示装置50的显示区域51呈矩阵状地配置多个。发光元件分别具有具备由一对电极夹持的有机层的结构,详情在后文说明。
141.需要说明的是,在此所说的像素是指在显示区域51中能够进行所希望的颜色的显示的最小单位。在彩色有机el显示装置的情况下,通过表现出互不相同的发光的第一发光元件52r、第二发光元件52g、第三发光元件52b的多个副像素的组合来构成像素52。像素52多通过红色(r)发光元件、绿色(g)发光元件、蓝色(b)发光元件这三个种类的副像素的组合构成,但是没有限定于此。像素52只要包含至少一个种类的副像素即可,优选包含两个种类以上的副像素,更优选包含三个种类以上的副像素。作为构成像素52的副像素,例如,可以是红色(r)发光元件、绿色(g)发光元件、蓝色(b)发光元件、黄色(y)发光元件这四个种类的副像素的组合。
142.图23(b)是图23(a)的a-b线处的局部剖视示意图。像素52具有多个副像素,这多个副像素由在基板53上具备第一电极(阳极)54、空穴输送层55、红色层56r/绿色层56g/蓝色层56b的任一个、电子输送层57、第二电极(阴极)58的有机el元件构成。它们中的空穴输送层55、红色层56r、绿色层56g、蓝色层56b、电子输送层57相当于有机层。红色层56r、绿色层56g、蓝色层56b分别形成为与发出红色、绿色、蓝色的发光元件(有时也记述为有机el元件)对应的图案。
143.另外,第一电极54按照各发光元件而分离形成。空穴输送层55、电子输送层57、第
二电极58可以遍及多个发光元件52r、52g、52b共用地形成,也可以按照各发光元件形成。即,可以如图23(b)所示,在空穴输送层55遍及多个副像素区域作为共用的层形成的基础上,红色层56r、绿色层56g、蓝色层56b按照各副像素区域分离地形成,进而在其上将电子输送层57和第二电极58遍及多个副像素区域作为共用的层形成。
144.需要说明的是,为了防止接近的第一电极54之间的短路而在第一电极54间设置绝缘层59。此外,由于有机el层因水分或氧而劣化,因此设置有用于保护有机el元件免于遭受水分或氧的保护层60。
145.在图23(b)中,空穴输送层55、电子输送层57由一个层表示,但是根据有机el显示元件的结构,也可以由具有空穴阻挡层、电子阻挡层的多个层形成。而且,在第一电极54与空穴输送层55之间也可以形成空穴注入层,该空穴注入层具有能够使空穴从第一电极54向空穴输送层55的注入顺畅地进行的能带结构。同样,在第二电极58与电子输送层57之间也可以形成电子注入层。
146.红色层56r、绿色层56g、蓝色层56b可以分别由单一的发光层形成,也可以通过将多个层层叠而形成。例如,可以通过两层构成红色层56r,通过红色的发光层形成上侧的层,通过空穴输送层或电子阻挡层形成下侧的层。或者,也可以通过红色的发光层形成下侧的层,通过电子输送层或空穴阻挡层形成上侧的层。通过这样在发光层的下侧或上侧设置层,由此,具有通过调整发光层中的发光位置并调整光路长而使发光元件的颜色纯度提高的效果。
147.需要说明的是,在此虽然示出了红色层56r的例子,但是在绿色层56g、蓝色层56b中也可以采用同样的结构。而且,层叠数可以设为两层以上。此外,可以将发光层和电子阻挡层那样不同材料的层层叠,也可以例如将发光层层叠两层以上等将相同材料的层层叠。
148.接下来,具体说明有机el显示装置的制造方法的例子。在此,设想红色层56r由下侧层56r1和上侧层56r2这两层构成,绿色层56g和蓝色层56b由单一的发光层构成的情况。
149.首先,准备形成有用于驱动有机el显示装置的电路(未图示)及第一电极54的基板53。需要说明的是,基板53的材质没有特别限定,可以由玻璃、塑料、金属等构成。在本实施方式中,作为基板53,使用在玻璃基板上层叠有聚酰亚胺的膜的基板。
150.将丙烯酸或聚酰亚胺等的树脂层通过棒涂或旋涂而涂层在形成有第一电极54的基板53上,将树脂层通过光刻法,以在形成有第一电极54的部分形成开口的方式进行制图而形成绝缘层59。该开口部相当于发光元件实际发光的发光区域。需要说明的是,在本实施方式中,对大型基板进行处理直至形成绝缘层59,在形成绝缘层59之后,执行将基板53分割的分割工序。
151.将制图有绝缘层59的基板53向第一成膜装置1送入,将空穴输送层55在显示区域的第一电极54上成膜为共用的层。空穴输送层55使用按照最终成为一个个有机el显示装置的面板部分的各显示区域51形成有开口的掩模来成膜。
152.接下来,将形成至空穴输送层55的基板53向第二成膜装置1送入。进行基板53与掩模的对准,将基板载置在掩模上,在空穴输送层55之上的配置基板53的发出红色的元件的部分(形成红色的副像素的区域)成膜出红色层56r。在此,在第二成膜室中使用的掩模是仅在成为有机el显示装置的副像素的基板53上的多个区域中的、成为红色的副像素的多个区域形成有开口的高精细掩模。由此,包含红色发光层的红色层56r仅成膜于基板53上的成为
多个副像素的区域中的成为红色的副像素的区域。换言之,红色层56r未成膜于基板53上的成为多个副像素的区域中的成为蓝色的副像素的区域、成为绿色的副像素的区域,而是选择性地成膜于成为红色的副像素的区域。
153.与红色层56r的成膜同样,在第三成膜装置1中成膜出绿色层56g,进而在第四成膜装置1中成膜出蓝色层56b。在红色层56r、绿色层56g、蓝色层56b的成膜完成之后,在第五成膜装置1中在显示区域51的整体成膜出电子输送层57。电子输送层57在三色的层56r、56g、56b上形成为共用的层。
154.使形成至电子输送层57的基板向第六成膜装置1移动,成膜出第二电极58。在本实施方式中,在第一成膜装置1~第六成膜装置1中通过真空蒸镀进行各层的成膜。然而,本发明没有限定于此,例如第六成膜装置1中的第二电极58的成膜也可以通过溅射成膜。然后,使形成至第二电极58的基板向密封装置移动而通过等离子体cvd来成膜保护层60(密封工序),完成有机el显示装置50。需要说明的是,在此虽然通过cvd法形成保护层60,但是没有限定于此,也可以通过ald法或喷墨法形成。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。