1.本公开涉及自动化增材制造生产系统的系统和方法。
背景技术:
2.本部分中的陈述仅提供了与本公开相关的背景信息,并且可能不构成现有技术。
3.增材制造生产系统可包括控制器和机器人,所述控制器和机器人被配置为顺序地添加材料层以构建三维(3d)对象,诸如工具、消费电子产品、塑料、车辆部件、航空航天部件等对象。然而,增材制造生产过程非常耗时,并且需要大量的操作员交互和控制,以确保及时、有效且准确地生产对象。本公开解决了与增材制造生产系统相关的这些和其他问题。
技术实现要素:
4.本部分提供了对本公开的总体概述并且不是对其全部范围或其所有特征的全面公开。
5.本公开提供了一种自动化增材制造生产(aamp)系统,所述aamp系统包括:控制器;多个aamp系统站,所述多个aamp系统站设置在环境中并且被配置为执行一个或多个aamp例程;以及多个机器人,所述多个机器人被配置为在所述环境内自主行进。所述控制器被配置为基于所述环境的数字模型和aamp系统操作数据从所述多个aamp系统站中选择一个或多个aamp系统站以执行所述一个或多个aamp例程。所述aamp系统操作数据包括打印机状态、清洁装置状态或它们的组合。
6.在一种形式中,所述多个aamp系统站的所述操作数据包括所述打印机状态,并且当所述打印机状态指示所述多个aamp系统站中的打印机正在可用状态下操作时,所述控制器被配置为命令所述多个机器人中的机器人将工件安装到所述打印机的夹具上。在一种形式中,所述多个aamp的所述操作数据包括所述打印机状态,并且当所述打印机状态指示所述多个aamp系统站中的打印机正在完成状态下操作时,所述控制器被配置为命令所述多个机器人中的机器人将工件从所述打印机的夹具移除。在一种形式中,所述多个机器人和所述aamp系统站可通信地耦合,所述多个aamp系统站的所述操作数据包括所述打印机状态,并且当所述打印机状态指示所述多个aamp系统站中的打印机正在完成状态和可用状态中的一者下操作时,所述多个机器人中的机器人被配置为命令所述打印机打开所述打印机的门、关闭所述打印机的所述门或它们的组合。在一种形式中,所述多个aamp系统站的所述操作数据包括所述清洁装置状态,并且当所述清洁装置状态指示所述多个aamp系统站中的清洗机正在可用状态下操作时,所述控制器被配置为命令来自所述多个机器人中的机器人将工件安装到所述清洁装置的夹具上。
7.在一种形式中,所述多个aamp系统站的所述操作数据包括所述清洁装置状态,并且当所述清洁装置状态指示所述多个aamp系统站中的清洗机正在完成状态下操作时,所述控制器被配置为命令来自所述多个机器人中的机器人将工件从所述清洁装置的夹具移除。在一种形式中,所述多个机器人和所述aamp系统站可通信地耦合,所述多个aamp系统站的
所述操作数据包括所述清洁装置状态,并且当所述清洁装置状态指示所述多个aamp系统站中的清洗机正在完成状态和可用状态中的一者下操作时,所述多个机器人中的机器人被配置为命令所述清洁装置打开所述清洁装置的门、关闭所述清洁装置的所述门或它们的组合。在一种形式中,所述多个aamp系统站的所述操作数据包括所述打印机状态和所述清洁装置状态,并且当所述打印机状态指示所述多个aamp系统站中的打印机处于完成状态并且所述清洁装置状态指示所述多个aamp系统站中的清洗机处于可用状态时,所述控制器被配置为命令所述多个机器人中的机器人将工件从所述打印机的夹具移除并将所述工件安装到所述清洁装置的夹具上。在一种形式中,所述环境的所述数字模型指示所述多个aamp系统站的位置、所述多个机器人的位置或它们的组合。在一种形式中,所述控制器被配置为基于所选择的一个或多个aamp系统站的位置、所述多个机器人的位置或它们的组合从所述多个机器人中选择一个或多个机器人以启动所述一个或多个aamp例程。在一种形式中,所述多个机器人和所述多个aamp系统站经由包括一个或多个服务器标签的应用程序编程接口可通信地耦合,其中所述一个或多个服务器标签被配置为经由传输控制协议套接字将所述机器人和所述aamp系统站可通信地耦合到远程服务器。
8.本公开提供了一种aamp系统,所述aamp系统包括:控制器;多个aamp系统站,所述多个aamp系统站设置在环境中并且被配置为执行一个或多个aamp例程;以及多个机器人,所述多个机器人被配置为在所述环境内自主行进。所述控制器被配置为基于所述环境的数字模型和aamp系统操作数据从所述多个aamp系统站中选择一个或多个aamp系统站以执行所述一个或多个aamp例程。所述控制器被配置为基于所选择的一个或多个aamp系统站的位置、所述多个机器人的位置或它们的组合从所述多个机器人中选择一个或多个机器人以启动所述一个或多个aamp例程。所述环境的所述数字模型指示所述多个aamp系统站的位置、所述多个机器人的所述位置或它们的组合。所述aamp系统操作数据包括打印机状态、清洁装置状态或它们的组合。
9.本公开提供了一种用于控制设置在环境中的多个aamp系统站的方法,其中所述环境包括被配置为在所述环境内自主行进的多个机器人。所述方法包括基于所述环境的数字模型和aamp系统操作数据从所述多个aamp系统站中选择一个或多个aamp系统站以执行一个或多个aamp例程,其中所述环境的所述数字模型指示所述多个aamp系统站、所述多个机器人的所述位置或它们的组合,并且所述aamp系统操作数据包括打印机状态、清洁装置状态或它们的组合。所述方法包括基于所选择的一个或多个aamp系统站的位置、所述多个机器人的位置或它们的组合从所述多个机器人中选择一个或多个机器人以启动所述一个或多个aamp例程,以及命令所述一个或多个机器人自主行进到与所述一个或多个aamp系统站相关联的位置。
10.在一种形式中,所述多个aamp系统站的所述操作数据包括所述打印机状态,并且所述方法包括当所述打印机状态指示所述打印机正在可用状态下操作时,由所述一个或多个机器人中的机器人将工件安装到所选择的一个或多个aamp系统站中的清洗机的夹具上。在一种形式中,所述多个aamp系统站的所述操作数据包括所述打印机状态,并且所述方法包括当所述打印机状态指示所述打印机正在完成状态下操作时,由所述一个或多个机器人中的机器人将工件从所选择的一个或多个aamp系统站中的打印机的夹具中移除。在一种形式中,所述多个aamp系统站的所述操作数据包括所述清洁装置状态,并且所述方法包括当
所述清洁装置状态指示所述清洁装置正在可用状态下操作时,由所述一个或多个机器人中的机器人将工件安装到所选择的一个或多个aamp系统站中的清洗机的夹具上。
11.根据本文中提供的描述,另外的适用领域将变得显而易见。应当理解,描述和具体示例仅意图用于说明目的,而不意在限制本公开的范围。
附图说明
12.为了可以很好地理解本公开,现在将参考附图通过举例的方式描述本公开的各种形式,在附图中:
13.图1是根据本公开的教导的增材制造环境的功能框图;
14.图2是根据本公开的本教导的示例性机器人的示意图;
15.图3是根据本公开的本教导的另一示例性机器人的示意图;
16.图4是根据本公开的本教导的机器人、控制器和aamp系统站的功能框图;
17.图5是根据本公开的本教导的另一示例性机器人、控制器和aamp系统站的功能框图;以及
18.图6示出了根据本公开的教导的示例性控制例程。
19.本文中描述的附图仅用于说明目的,而并非意图以任何方式限制本公开的范围。
具体实施方式
20.以下描述本质上仅仅是示例性的并且不意图限制本公开、应用或用途。应理解,贯穿附图,对应的附图标记指示相似或对应的零件和特征。
21.本公开提供了多个自主机器人,所述多个自主机器人共同启动在3d打印装置和/或清洁装置处执行的一个或多个aamp例程。具体地,控制器获得机器人操作数据和aamp系统站数据以将机器人分配给各种3d打印装置和/或清洁装置并启动aamp例程(例如,将工件装载到清洗机中/从清洗机移除)。
22.作为一个示例,控制器可选择机器人以将工件装载到3d打印装置中。一旦3d打印装置完成3d打印操作,控制器就可从清洁装置和机器人获得操作数据。此外,清洁装置的操作数据指示一组清洁装置可用于执行清洁例程,并且一组机器人可用于启动清洁例程。因此,控制器可选择机器人中的一个和清洁装置中的一个来执行清洁例程,使得机器人行进的距离和/或在3d打印例程的结束与清洁例程的启动之间经过的时间被约束。
23.因此,控制器通过选择性地且协作地促进aamp例程的启动而无需操作员干预来提高增材制造环境的aamp例程的效率。
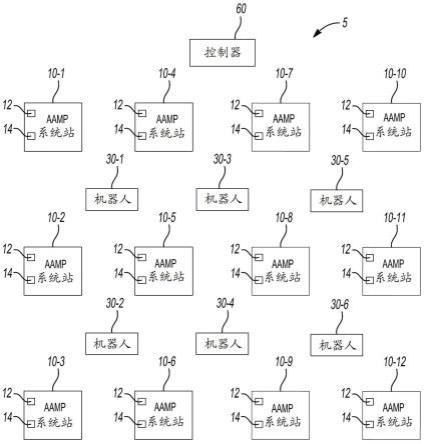
24.参考图1,提供了增材制造(am)环境5,并且所述am环境通常包括aamp系统站10-1、10-2、
……
10-12(在本文统称为“aamp系统站10”)、机器人30-1、30-2、
……
30-6(在本文统称为“机器人30”)和控制器60。虽然控制器60被示为am环境5的一部分,但应该理解,控制器60可远离am环境5定位。在一种形式中,aamp系统站10、机器人30和控制器60使用无线通信协议(例如,型协议、蜂窝协议、无线保真(wi-fi)型协议、近场通信(nfc)协议、超宽带(uwb)协议等)可通信地耦合。在一种形式中,aamp系统站10和机器人30经由应用程序编程接口(api)彼此可通信地耦合,所述api基于aamp系统站10的类型和机器人30的类型唯一地定义(例如,实现机器人与3d打印机/清洗机和/或
3d打印机/清洗机之间的通信的api)。作为一个示例,api可包括一个或多个服务器标签,所述一个或多个服务器标签经由传输控制协议(tcp)套接字将机器人30和aamp系统站10可通信地耦合到远程服务器(例如,javaserver、客户端服务器以及其他服务器)。
25.在一种形式中,aamp系统站10包括被配置为执行一个或多个aamp例程的aamp部件12。如本文所用,“aamp例程”是指由aamp系统站10执行的自动化预处理am例程、自动化处理am例程和/或自动化后处理am例程。示例性自动化预处理am例程包括但不限于:定义和/或上传3d产品的数字模型(例如,计算机辅助设计(cad)文件和/或标准曲面细分语言(stl)文件);对3d产品的数字模型进行切片以定义各个层;定义aamp系统站10的一个或多个工具的工具路径;将细丝装载到卷轴中等。示例性自动化处理am例程包括但不限于:沉积、接合或固化材料以创建3d产品。示例性自动化后处理am例程包括但不限于对3d产品进行:清洁、固化、表面精加工、固定和/或着色。为了执行本文所述的aamp例程,aamp部件12可包括打印机、清洁装置(例如,空气基清洗机、酒精基清洗机、材料喷射装置、粉末床熔融装置等)、填充/焊接装置、紫外线固化(uv固化)装置以及其他aamp部件。
26.在一种形式中,aamp系统站10包括被配置为监视和控制由aamp部件12执行的aamp例程的aamp控制器14。在一种形式中,aamp控制器14被配置为向控制器60广播aamp系统站10的操作数据(以下称为“aamp系统操作数据”),并且aamp系统操作数据可包括打印机状态、清洁装置状态或它们的组合。作为一个示例,打印机/清洁装置状态可指示打印机/清洁装置(作为aamp系统站10)正在可用状态、不可用状态或完成状态下操作。如本文所用,“可用状态”是指其中没有设置用于执行aamp例程的工件。如本文所用,“不可用状态”是指其中设置有工件并且当前正在执行aamp例程。如本文所用,“完成状态”是指其中设置有工件并且最近已完成aamp例程。应理解,aamp系统操作数据可包括其他类型的数据,诸如aamp系统站10的识别信息、与aamp系统站10相关联的能力/约束或它们的组合。如下面进一步详细描述,控制器60被配置为基于aamp系统操作数据和am环境5的数字模型来选择至少一组aamp系统站10以执行aamp例程。
27.参考图1至图2,在一种形式中,机器人30-1包括设置在机器人30-1的主体34上的一个或多个机器人臂32和机器人控制器36-1。在一种形式中,机器人臂32具有变化的运动范围,并且机器人控制器36-1被配置为操作机器人臂32以执行一个或多个自动化任务。作为一个示例,机器人控制器36-1可控制机器人臂32以将工件38从托盘40移除并将工件38安装到清洁装置或打印机(作为aamp系统站10-1)的夹具上。作为另一示例,机器人控制器36-1可控制机器人臂32以将工件38从清洁装置或打印机(作为aamp系统站10-1)移除并将工件38安装在托盘40内。作为附加示例,机器人控制器36-1可控制机器人臂32打开和/或关闭打印机或清洁装置(作为aamp系统站10-1)的门41。
28.参考图1和图3,在一种形式中,机器人30-2类似于机器人30-1,但还包括设置在机器人30-2的主体34上的辅助aamp处理站42。在一种形式中,辅助aamp处理站42包括被配置为执行自动化预处理am例程和/或自动化后处理am例程的一个或多个部件。作为一个示例,辅助aamp处理站42可包括清洁装置,诸如但不限于:空气基清洗机44(例如,共同放出压缩空气的压缩机和导管)、酒精基清洗机46(例如,异丙醇(ipa)清洁罐)或它们的组合。机器人30-2包括机器人控制器36-2,所述机器人控制器类似于机器人控制器36-1,但包括操作辅
助ammp处理站42的附加功能。例如,机器人控制器36-2以与机器人控制器36-1类似的方式被配置为控制机器人30-2的机器人臂32,并进一步控制机器人臂32以将工件38定位在空气基清洗机44和/或酒精基清洗机46附近和/或所述空气基清洗机和/或酒精基清洗机内以清洁工件38。在下文中,机器人控制器36-1和36-2可统称为“机器人控制器36”。
29.参考图1至图3,在一种形式中,机器人30是部分或完全自主的,并且被配置为如控制器60所命令自主移动到am环境5的各个位置。为了自主移动自身,机器人控制器36被配置为基于从一个或多个传感器50获得的位置数据来控制机器人30的各种移动系统。在示例性应用中,移动系统可包括推进系统、用于控制轮子48的转向系统和/或制动系统,并且用于提供位置数据的传感器50可以包括gnss传感器、成像传感器、本地位置传感器等。因此,机器人控制器36可包括移动驱动器和系统、收发器、路由器和/或输入/输出接口硬件以执行本文描述的功能。
30.参考图4,机器人30-1的机器人控制器36-1包括定位模块52、导航模块54、操作控制模块56-1和状态模块58。在一种形式中,控制器60包括机器人定位模块62、数字模型数据库64和指令模块66。在一种形式中,aamp控制器14包括aamp控制模块72和状态模块74。应容易理解,机器人控制器36、控制器60和aamp控制器14的部件中的任一部件可设置在相同的位置或分布在不同的位置(例如,经由一个或多个边缘计算装置),并且相应地可通信地耦合。
31.在一种形式中,定位模块52基于由传感器50生成的位置数据来确定机器人30-1的位置,所述传感器可以是gnss传感器。在一种形式中,导航模块54被配置为基于以下项在am环境5内自主地导航:来自控制器60的自主行进到aamp系统站10中的一者的指令;所确定的机器人30-1的位置;以及已知的自主导航例程(例如,路径规划例程、操纵规划例程和/或轨迹规划例程)。
32.在一种形式中,机器人30-1的操作控制模块56-1被配置为基于来自控制器60的指令来控制机器人臂32的操作以执行自动化任务。作为一个示例,机器人30-1的操作控制模块56-1可控制机器人臂以将工件38从托盘40或aamp系统站10移除/安装到所述托盘或aamp系统站中,和/或打开/关闭或aamp系统站10的门41。在一种形式中,状态模块58被配置为向控制器60广播机器人30-1的操作数据(在下文称为“机器人操作数据”),并且机器人操作数据可包括机器人臂32正在执行的操作类型、机器人30-1的位置和/或机器人30-1的导航状态(例如,机器人30-1正在自主导航到给定的aamp系统站10,以基于来自控制器60的指令启动aamp例程)。
33.参考图5,机器人30-2的机器人控制器36-2以与图4的机器人控制器36-1类似的方式配置,但相对于操作控制模块有所不同。具体地,机器人控制器36-2包括操作控制模块56-2,所述操作控制模块包括用于监视和控制机器人臂32的臂控制模块81以及用于监视和控制空气基清洗机44和酒精基清洗机46的辅助aamp控制模块82-1、82-2。因此,机器人操作数据还可包括机器人30-2的辅助处理状态(例如,空气基清洗机44和/或醇基清洗机46正在可用状态、不可用状态还是完成状态下操作)。
34.参考图4至图5,关于aamp控制器14,aamp控制模块72被配置为监视和控制由aamp部件12执行的aamp例程。在一种形式中,状态模块74被配置为向控制器60广播aamp系统操作数据,诸如打印机状态(例如,打印机处于可用状态、不可用状态还是完成状态)或清洁装
置状态(例如,清洁装置处于可用状态、不可用状态还是完成状态)。
35.关于控制器60,机器人定位模块62被配置为基于由机器人30的状态模块58广播的位置来动态地更新存储在数字模型数据库64中的am环境5的数字模型。在一种形式中,数字模型是am环境5的数字孪生并且包括aamp系统站10的位置和/或机器人30的位置。
36.在一种形式中,指令模块66被配置为基于一个或多个控制规则来选择一个或多个aamp系统站10和/或机器人30以执行一个或多个aamp例程,所述一个或多个控制规则被配置为通过协作地协调aamp例程来增强aamp例程的效率。具体地并且如下文进一步详细描述,指令模块66可基于数字模型、机器人操作数据和aamp系统操作数据来选择一个或多个aamp系统站10和/或机器人30。
37.在一种形式中,指令模块66被配置为基于aamp系统操作数据来选择一个或多个aamp系统站10以执行一个或多个aamp例程。作为一个示例,当3d打印机(作为aamp系统站10-3)的打印机状态是正在可用状态下操作时,指令模块66选择3d打印机以执行3d打印例程。作为另一示例,当清洗机(作为aamp系统站10-4)的清洁装置状态处于可用状态时,指令模块66选择清洗机以执行清洁例程。
38.在一种形式中,指令模块66被配置为基于数字模型选择一个或多个aamp系统站10并选择一个或多个机器人30以启动一个或多个aamp例程,所述数字模型包括机器人30的位置和aamp系统站10的位置。在一种形式中,指令模块66基于机器人30要行进的距离来选择aamp系统站10和机器人30的组合以启动aamp例程。作为一个示例,指令模块66响应于机器人30-1与3d打印机之间的距离在预定阈值距离内而选择机器人30-1以在3d打印机(作为aamp系统站10-3)处启动aamp例程。作为另一示例,指令模块66响应于机器人30-1与清洗机之间的距离小于机器人30-2与清洗机之间的距离而选择机器人30-1以在清洗机(作为aamp系统站10-4)处启动aamp例程。
39.在一种形式中,指令模块66被配置为基于机器人操作数据来选择一个或多个机器人30以启动一个或多个aamp例程,所述机器人操作数据可包括机器人臂32正执行的操作类型、机器人30的导航状态和机器人30的辅助过程状态,前提是机器人包括辅助aamp处理站42。作为一个示例,指令模块66响应于机器人30-1的机器人操作数据指示机器人臂32当前没有执行任何功能并且机器人30-1没有自主导航到另一aamp系统站点10而选择机器人30-1以在清洗机(作为aamp系统站10-4)处启动aamp例程。作为另一示例,指令模块66响应于机器人操作数据指示机器人臂32当前没有执行任何操作,空气基清洗机44和酒精基清洗机46处于可用状态,并且机器人30-2没有自主导航到另一aamp系统站10而选择机器人30-2以在3d打印机(作为aamp系统站10-3)处启动aamp例程。
40.在一种形式中,指令模块66被配置为基于位置和aamp系统操作数据生成指令并向所选择的机器人30广播指令。作为一个示例,当3d打印机(作为aamp系统站10-3)的打印机状态是正在完成状态下操作时,指令模块66被配置为选择并命令机器人30-1行进到与3d打印机相关联的位置,以将工件38安装到3d打印机的夹具上。此外,指令模块66可命令机器人30在将工件38安装到夹具上之前打开门41,并且一旦安装完成就关闭门41。
41.作为另一示例,当3d打印机(作为aamp系统站10-3)的打印机状态是正在完成状态下操作时,指令模块66被配置为选择并命令机器人30-1行进到与3d打印机相关联的位置并将工件38从3d打印机的夹具移除。此外,指令模块66可命令机器人30在从夹具移除工件38
之前打开门41,并且一旦移除完成就关闭门41。
42.作为附加示例,当清洗机(作为aamp系统站10-4)的清洁装置状态是正在可用状态下操作时,指令模块66被配置为选择并命令机器人30-1将工件38安装到清洁机的夹具上。此外,指令模块66可命令机器人30在将工件38安装到夹具上之前打开门41,并且一旦安装完成就关闭门41。在一种形式中,指令模块66响应于3d打印机(作为aamp系统10-3)的打印机状态是正在完成状态下操作而命令机器人30-1将工件38安装到清洗机(作为aamp系统站10-4)的夹具上。
43.作为进一步示例,当清洗机(作为aamp系统站10-4)的清洁装置状态是正在完成状态下操作时,指令模块66被配置为选择并命令机器人30-1将工件38从清洗机的夹具移除。此外,指令模块66可命令机器人30在从夹具移除工件38之前打开门41,并且一旦移除完成就关闭门41。
44.作为附加示例,当3d打印机(作为aamp系统站10-3)的打印机状态是正在完成状态下操作并且机器人30-1的辅助处理状态处于可用状态时,指令模块66被配置为选择并命令机器人30-2行进到与3d打印机相关联的位置,打开门41,将工件38从3d打印机的夹具移除,关闭门41,并且将工件38定位在辅助aamp处理站42内和/或所述辅助aamp处理站附近以执行辅助aamp处理例程。
45.因此,指令模块66被配置为通过使用自主机器人并且在没有操作员干预的情况下选择性地且协作地促进和启动aamp例程的序列来增强am环境5的aamp例程的效率。此外,指令模块66通过考虑专用自主机器人来增强am环境5的aamp例程的效率,所述专用自主机器人在选择性地且协作地促进和启动aamp例程的序列时执行aamp例程。
46.参考图6,提供了用于控制由aamp系统站10执行的一个或多个aamp例程的示例性例程600。在604处,控制器60获得机器人操作数据和aamp系统操作数据。在608处,控制器60基于aamp系统数据、机器人操作数据和am环境5的数字模型来选择aamp系统站10中的一个或多个以执行给定aamp例程,并且选择机器人30中的一个以启动aamp例程。在612处,控制器60命令所选择的机器人30自主行进到所选择的aamp系统站10以启动aamp例程。
47.除非本文另有明确指示,否则指示机械/热性质、组成百分比、尺寸和/或公差或其他特性的所有数值在描述本公开的范围时应理解为由词语“约”或“大约”修饰。出于各种原因期望进行这种修饰,所述原因包括:工业实践;材料、制造和组装公差;以及测试能力。
48.如本文所使用,短语a、b和c中的至少一者应被解释为使用非排他性逻辑“或”表示逻辑(a或b或c),并且不应被解释为表示“a中的至少一者、b中的至少一者以及c中的至少一者”。
49.在本技术中,术语“控制器”和/或“模块”可指代以下项、是以下项的一部分或包括以下项:专用集成电路(asic);数字、模拟或混合模拟/数字离散电路;数字、模拟或混合模拟/数字集成电路;可组合的逻辑电路;现场可编程门阵列(fpga);执行代码的处理器电路(共享、专用或群组);存储由处理器电路执行的代码的存储器电路(共享、专用或群组);提供所描述的功能性的其他合适的硬件部件;或者上述的一些或全部的组合,诸如在片上系统中。
50.术语存储器是术语计算机可读介质的子集。如本文所使用的术语计算机可读介质不涵盖通过介质(诸如在载波上)传播的暂时性电信号或电磁信号;因此术语计算机可读介
质可被认为是有形的和非暂时性的。非暂时性有形计算机可读介质的非限制性示例是非易失性存储器电路(诸如快闪存储器电路、可擦除可编程只读存储器电路或掩模只读电路)、易失性存储器电路(诸如静态随机存取存储器电路或动态随机存取存储器电路)、磁性存储介质(诸如模拟或数字磁带,或者硬盘驱动器)和光学存储介质(诸如cd、dvd或蓝光光盘)。
51.本技术中所描述的设备和方法可由专用计算机部分地或完全地实现,所述专用计算机通过将通用计算机配置为执行计算机程序中体现的一种或多种特定功能来创建。功能框、流程图组成部分和上文描述的其他要素用作软件规范,所述软件规范可通过技术人员或程序员的常规工作来转译成计算机程序。
52.本公开的描述本质上仅仅是示例性的,并且因此,不脱离本公开的实质的变型意图在本公开的范围内。不应将此类变型视为脱离本公开的精神和范围。
53.根据本发明,提供了一种自动化增材制造生产(aamp)系统,所述aamp系统具有:控制器;多个aamp系统站,所述多个aamp系统站设置在环境中并且被配置为执行一个或多个aamp例程;以及多个机器人,所述多个机器人被配置为在所述环境内自主行进,其中:所述控制器被配置为基于所述环境的数字模型和aamp系统操作数据从所述多个aamp系统站中选择一个或多个aamp系统站以执行所述一个或多个aamp例程;并且所述控制器被配置为基于所选择的一个或多个aamp系统站的位置、所述多个机器人的位置或它们的组合从所述多个机器人中选择一个或多个机器人以启动所述一个或多个aamp例程;所述环境的所述数字模型指示所述多个aamp系统站的位置、所述多个机器人的所述位置或它们的组合;并且所述aamp系统操作数据包括打印机状态、清洁装置状态或它们的组合。
54.根据一个实施例:所述多个aamp系统站的所述操作数据包括所述打印机状态;并且当所述打印机状态指示所述多个aamp系统站中的打印机正在可用状态下操作时,所述控制器被配置为命令所述一个或多个机器人中的机器人将工件安装到所述打印机的夹具上。
55.根据一个实施例:所述多个aamp的所述操作数据包括所述打印机状态;并且当所述打印机状态指示所述多个aamp系统站中的打印机正在完成状态下操作时,所述控制器被配置为命令所述一个或多个机器人中的机器人将工件从所述打印机的夹具移除。
56.根据一个实施例:所述多个aamp系统站的所述操作数据包括所述清洁装置状态;并且当所述清洁装置状态指示所述多个aamp系统站中的清洗机正在可用状态下操作时,所述控制器被配置为命令所述一个或多个机器人中的机器人将工件安装到所述清洁装置的夹具上。
57.根据一个实施例:所述多个aamp系统站的所述操作数据包括所述清洁装置状态;并且当所述清洁装置状态指示所述多个aamp系统站中的清洗机正在完成状态下操作时,所述控制器被配置为命令所述一个或多个机器人中的机器人将工件从所述清洁装置的夹具移除。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。