1.本发明属于航天器轨道估计技术领域,尤其涉及一种事件触发无迹卡尔曼滤波航天器轨道估计器。
背景技术:
2.随着通信技术、空间技术和计算机技术的发展,人类的航天活动越来越频繁。航天器是用于执行相应航天任务的装置。航天器在运行过程中需要与地面保持及时有效的联系,获得航天器运行过程中姿态、速度以及轨道信息,并快速作出反应,保障航天器的安全运行。航天器轨道估计是其运行和控制中最重要的任务之一。轨道估计是在确定航天器初始轨道的基础上,利用地面站实时获取的轨道信息预估未来时刻的航天器轨道状态,并及时做出反馈进而采取相应调整措施,使航天器保持在要求的轨道范围内,顺利安全的完成任务。
3.航天器的轨道信息可通过地面站跟踪测量航天器相对于地面站的距离、速度、方位角和仰角来获得。地面站接收到航天器遥测数据并将数据传送到航天测控中心,接收测控中心的计划、指令和数据,并按要求将指令和数据发送至航天器,完成航天器的各种操作。航天器通讯选用的工作频段会影响系统的传输容量,影响通讯质量,适合通讯的频段是有限的。为减轻地面站的负担,降低航天工程的成本,提高卫星的生存能力,提出事件触发状态估计方法。
4.事件触发状态估计,这种机制下在航天器估计器中添加了事件触发,系统可根据轨道信息估计效果调整采样时刻,从而避免不必要的通信。在地面站和航天器通讯过程中,如果能够按照一定的数据传输触发机制决定是否需要向估计器发送测量值,则会节省通信资源,同时减少时延和丢包,有利于提高估计器的性能。
技术实现要素:
5.本发明的技术解决问题:克服现有技术的不足,提供一种事件触发无迹卡尔曼滤波航天器轨道估计器,该估计器可以在保证估计效果的前提下,降低通讯率,解决了航天器与地面站信息传输时通讯资源有限的问题。
6.为了解决上述技术问题,本发明公开了一种事件触发无迹卡尔曼滤波航天器轨道估计器,包括:
7.航天器轨道系统模块,用于建立航天器沿轨道运动的状态方程和测量方程;
8.事件触发模块,用于对是否满足事件触发条件进行判定,根据判定结果,确定是否将当前时刻的地面站测量信息传输至无迹卡尔曼滤波估计模块;
9.无迹卡尔曼滤波估计模块,用于根据航天器沿轨道运动的状态方程和测量方程,结合事件触发模块传输来的当前时刻的地面站测量信息,进行当前时刻的轨道估计,根据当前时刻的轨道估计结果,判断当前轨道是否偏离航天器预定轨道。
10.在上述事件触发无迹卡尔曼滤波航天器轨道估计器中,无迹卡尔曼滤波估计模块
在根据航天器沿轨道运动的状态方程和测量方程,结合事件触发模块传输来的当前时刻的地面站测量信息,进行当前时刻的轨道估计时,包括:
11.根据航天器沿轨道运动的状态方程和测量方程,利用上一时刻的轨道估计状态,对当前时刻的轨道状态进行预测,得到当前时刻的轨道状态的预测值;
12.当满足事件触发条件,从事件触发模块获取到当前时刻的地面站测量信息时,从当前时刻的地面站测量信息中获取得到当前时刻的轨道状态的测量值,并使用当前时刻的轨道状态的测量值对当前时刻的轨道状态的预测值进行修正,得到最终的轨道状态估计值并输出;
13.当不满足事件触发条件,未从事件触发模块获取到当前时刻的地面站测量信息时,根据历史时刻的轨道状态的测量值,对下一时刻的轨道状态进行估计。
14.在上述事件触发无迹卡尔曼滤波航天器轨道估计器中,无迹卡尔曼滤波估计模块,还用于:在确定当前轨道偏离航天器预定轨道时,发出指令信号,使星上设备按指令动作。
15.在上述事件触发无迹卡尔曼滤波航天器轨道估计器中,航天器沿轨道运动的状态方程和测量方程表示如下:
[0016][0017]yt
=h(x
t
) v
t
[0018]
其中,系统状态x
t
包含航天器位置向量r=[r
x r
y rz]和速度向量v=[v
x v
y vz];函数f(
·
)用来描述航天器轨道系统状态模型;h(x
t
)表示测量过程函数,由地面站测量的方位、仰角以及范围确定。
[0019]
在上述事件触发无迹卡尔曼滤波航天器轨道估计器中,对于f(x
t
),有:
[0020][0021]
其中,μ为地球引力常数,j2为j2摄动,r=||r||表示航天器到中心天体的距离,re为地球赤道半径。
[0022]
在上述事件触发无迹卡尔曼滤波航天器轨道估计器中,事件触发模块,用于:
[0023]
基于如下式(1)对是否满足事件触发条件进行判定:
[0024]
[0025]
其中,表示k时刻传感器i的测量信息,表示传感器i上一次的测量信息;δi表示传感器i对应的触发阈值;
[0026]
地面站测量信息包括:若干个传感器测量得到的测量信息即m表示传感器的数量;
[0027]
当时,传感器i的测量信息为此时,将传感器i的测量信息传输至无迹卡尔曼滤波估计模块;
[0028]
当时,传感器i的测量信息为此时,没有新的测量信息传输至无迹卡尔曼滤波估计模块。
[0029]
在上述事件触发无迹卡尔曼滤波航天器轨道估计器中,无迹卡尔曼滤波估计模块,具体用于通过如下方式实现当前时刻的轨道估计:
[0030]
获取在第i 1个传感器信息之前的所有信息
[0031][0032]
其中,
[0033]
根据贝叶斯法则,计算过程状态的最小均方误差估计
[0034][0035][0036]
当为k时刻传感器i的真实状态的估计值,则可按照如下方式更新下一时刻的轨道状态估计值
[0037]
1)选取sigma点:
[0038][0039][0040][0041]
其中,n表示系统状态维数;
[0042]
2)将sigma点映射到新的sigma点集:
[0043][0044]
3)加权后新的sigma点集用于预测轨道状态的估计值和协方差:
[0045]
[0046][0047]
其中,权重公式为:
[0048][0049][0050]
λ=α2(n κ)-n
[0051]
式中,表示矩阵的第i列,是表示分布的尺度函数;α表示sigma点集的距离平均点,α和κ用来控制sigma点集的分布;β与x的分布有关,β用于调节方差的准确度,如果x的分布是高斯的,则β=2是最优的选择;
[0052]
4)将sigma点集通过轨道观测函数映射到新的sigma点集:
[0053][0054]
5)加权后新的sigma点集用于预测航天器轨道观测的估计值和协方差:
[0055][0056][0057]
6)轨道状态测量协方差矩阵用于计算滤波器增益:
[0058][0059][0060]
7)轨道状态更新
[0061]
定义辅助变量那么当时,即事件触发条件满足时,轨道状态估计值及协方差矩阵为:
[0062][0063][0064]
而当即事件触发条件未满足时:
[0065][0066][0067]
其中,
[0068]
至此,完成事件触发的航天器轨道状态估计。
[0069]
在上述事件触发无迹卡尔曼滤波航天器轨道估计器中,在测量航天器轨道信息时,通过地面雷达向航天器发一个无线电脉冲信号,航天器上的应答机接收到该无线电脉冲信号后经放大立即向地面发出无线电脉冲应答信号;根据发出的无线电脉冲信号和返回的无线电脉冲应答信号的传播时间,计算得到航天器离地面站的距离,并根据雷达天线的仰角的方位确定航天器的位置。
[0070]
本发明具有以下优点:
[0071]
本发明结合事件触发,提出一种事件触发无迹卡尔曼滤波航天器轨道估计器。无迹卡尔曼滤波是针对非线性系统的估计方法,它是概率密度分布的近似,由于没有将高阶项忽略,所以在求解非线性时精度较高,其核心变换思想是近似一种概率分布比近似任意一个非线性函数或非线性变换要更容易。无迹卡尔曼滤波在高度非线性的情况下具有优越的性能,因为无迹卡尔曼滤波基于无迹变换,不包含任何传统的线性化过程或假设。其次,航天器在轨运行时,当航天器没有受到外部扰动或者处于一种理想的运动状态时,如果地面仍然周期性的传输数据,这样不仅浪费了有限的计算资源和通讯资源,还可能造成数据传输延迟、通讯阻塞等问题。当考虑事件触发机制,满足事件触发条件时,测量数据才会传输,估计器进行测量更新完成轨道状态估计;不满足事件触发时,结合历史信息进行轨道状态估计。因此,该事件触发无迹卡尔曼滤波航天器轨道估计器能够取得类似或者更优的估计性能,且能够降低数据发送率。
附图说明
[0072]
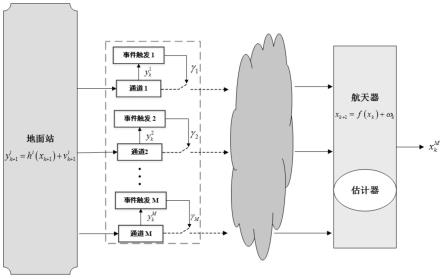
图1是本发明实施例中一种事件触发无迹卡尔曼滤波航天器轨道估计器的结构图;
[0073]
图2是本发明实施例中一种航天器与地面站几何关系示意图。
具体实施方式
[0074]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
[0075]
本发明的核心思想之一在于,公开了一种事件触发无迹卡尔曼滤波航天器轨道估计器,包括:航天器轨道系统模块、事件触发模块和无迹卡尔曼滤波估计模块。航天器轨道的观测数据,并不是直接测量轨道要素,而是测量与航天器运动相关的参量,根据轨道动力学原理,通过特定算法计算得出轨道要素。地面站可以观测航天器距离、方位角和仰角,利用这些数据和航天器轨道动力学特定算法获得某一时刻航天器的位置和速度信息。航天器的运动状态相对稳定,为节约通讯资源,设计了事件触发模块。当满足事件触发条件时,地面站通过测量得到该时刻的轨道信息;当不满足事件触发条件时,地面站不进行测量。经过事件触发模块的判断,获取的信息传输到无迹卡尔曼滤波估计模块,无迹卡尔曼滤波估计模块根据是否有数据输入分别进行轨道估计。当轨道估计偏离航天器预定轨道时,发出指令信号,使星上设备按指令动作。
[0076]
如图1,在本实施例中,该事件触发无迹卡尔曼滤波航天器轨道估计器,包括:
[0077]
航天器轨道系统模块,用于建立航天器沿轨道运动的状态方程和测量方程。
[0078]
在本实施例中,航天器沿轨道运动的状态方程和测量方程表示如下:
[0079][0080]yt
=h(x
t
) v
t
[0081]
其中,系统状态x
t
包含航天器位置向量r=[r
x r
y rz]和速度向量v=[v
x v
y vz];函数f(
·
)用来描述航天器轨道系统状态模型;h(x
t
)表示测量过程函数,由地面站测量的方位、仰角以及范围确定。
[0082]
对于f(x
t
),有:
[0083][0084]
其中,μ为地球引力常数,j2为j2摄动,r=||r||表示航天器到中心天体的距离,re为地球赤道半径。
[0085]
事件触发模块,用于对是否满足事件触发条件进行判定,根据判定结果,确定是否将当前时刻的地面站测量信息传输至无迹卡尔曼滤波估计模块。
[0086]
在本实施例中,如图2,在测量航天器轨道信息时,通过地面雷达向航天器发一个无线电脉冲信号,航天器上的应答机接收到该无线电脉冲信号后经放大立即向地面发出无线电脉冲应答信号;根据发出的无线电脉冲信号和返回的无线电脉冲应答信号的传播时间,计算得到航天器离地面站的距离,并根据雷达天线的仰角的方位确定航天器的位置。图2中,ρ表示地面站与航天器之间的距离,r表示航天器的半径矢量,rs表示地面跟踪站的半径矢量,αs和δs分别为航天的赤经和赤纬,θs为地面跟踪站的恒星时,λs为地面跟踪站的纬度,φs从地面跟踪站到航天器的东经。
[0087]
基本的轨道测量模型如下:
[0088]
r=rs ρ
[0089]
航天器与地面站距离向量ρ表示为:
[0090][0091]
地面站坐标(up,east和north)如图2所示,惯性坐标系到地面站坐标的转换为:
[0092]
[0093]
地面站测量航天器方位角(az)、仰角(el)和距离(ρ)来确定轨道信息。相应的测量信息为:
[0094][0095]
通常,地面站通过多种测量信息确定航天器轨道,本实施例为每种测量信息设置触发条件,通过判断事件触发条件是否满足来决定测量信息是否需要更新。所设计的事件触发条件如下:
[0096][0097]
其中,表示k时刻传感器i的测量信息,表示传感器i上一次的测量信息;δi表示传感器i对应的触发阈值。
[0098]
地面站测量信息包括:若干个传感器测量得到的测量信息即m表示传感器的数量。
[0099]
当时,传感器i的测量信息为此时,将传感器i的测量信息传输至无迹卡尔曼滤波估计模块。
[0100]
当时,传感器i的测量信息为此时,没有新的测量信息传输至无迹卡尔曼滤波估计模块。
[0101]
无迹卡尔曼滤波估计模块,用于根据航天器沿轨道运动的状态方程和测量方程,结合事件触发模块传输来的当前时刻的地面站测量信息,进行当前时刻的轨道估计,根据当前时刻的轨道估计结果,判断当前轨道是否偏离航天器预定轨道;在确定当前轨道偏离航天器预定轨道时,发出指令信号,使星上设备按指令动作。
[0102]
在本实施例中,无迹卡尔曼滤波估计模块在根据航天器沿轨道运动的状态方程和测量方程,结合事件触发模块传输来的当前时刻的地面站测量信息,进行当前时刻的轨道估计时,包括:根据航天器沿轨道运动的状态方程和测量方程,利用上一时刻的轨道估计状态,对当前时刻的轨道状态进行预测,得到当前时刻的轨道状态的预测值;当满足事件触发条件,从事件触发模块获取到当前时刻的地面站测量信息时,从当前时刻的地面站测量信息中获取得到当前时刻的轨道状态的测量值,并使用当前时刻的轨道状态的测量值对当前时刻的轨道状态的预测值进行修正,得到最终的轨道状态估计值并输出;当不满足事件触发条件,未从事件触发模块获取到当前时刻的地面站测量信息时,根据历史时刻的轨道状态的测量值,对下一时刻的轨道状态进行估计。具体的:
[0103]
获取在第i 1个传感器信息之前的所有信息
[0104][0105]
其中,
[0106]
根据贝叶斯法则,计算过程状态的最小均方误差估计
[0107][0108][0109]
当为k时刻传感器i的真实状态的估计值,则可按照如下方式更新下一时刻的轨道状态估计值
[0110]
1)选取sigma点:
[0111][0112][0113][0114]
其中,n表示系统状态维数。
[0115]
2)将sigma点映射到新的sigma点集:
[0116][0117]
3)加权后新的sigma点集用于预测轨道状态的估计值和协方差:
[0118][0119][0120]
其中,权重公式为:
[0121][0122][0123]
λ=α2(n κ)-n
[0124]
式中,表示矩阵的第i列,是表示分布的尺度函数;α表示sigma点集的距离平均点,α和κ用来控制sigma点集的分布;β与x的分布有关,β用于调节方差的准确度,如果x的分布是高斯的,则β=2是最优的选择。
[0125]
4)将sigma点集通过轨道观测函数映射到新的sigma点集:
[0126][0127]
5)加权后新的sigma点集用于预测航天器轨道观测的估计值和协方差:
[0128][0129][0130]
6)轨道状态测量协方差矩阵用于计算滤波器增益:
[0131][0132][0133]
7)轨道状态更新
[0134]
定义辅助变量那么当时,即事件触发条件满足时,轨道状态估计值及协方差矩阵为:
[0135][0136][0137]
而当即事件触发条件未满足时:
[0138][0139][0140]
其中,
[0141]
至此,完成事件触发的航天器轨道状态估计。
[0142]
对于系统实施例而言,由于其与方法实施例相对应,所以描述的比较简单,相关之处参见方法实施例部分的说明即可。
[0143]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0144]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。