技术特征:
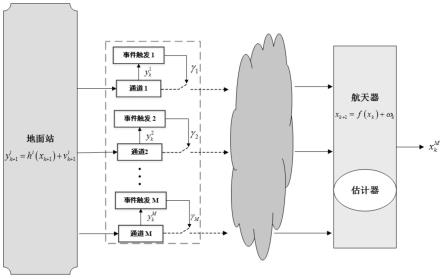
1.一种事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,包括:航天器轨道系统模块,用于建立航天器沿轨道运动的状态方程和测量方程;事件触发模块,用于对是否满足事件触发条件进行判定,根据判定结果,确定是否将当前时刻的地面站测量信息传输至无迹卡尔曼滤波估计模块;无迹卡尔曼滤波估计模块,用于根据航天器沿轨道运动的状态方程和测量方程,结合事件触发模块传输来的当前时刻的地面站测量信息,进行当前时刻的轨道估计,根据当前时刻的轨道估计结果,判断当前轨道是否偏离航天器预定轨道。2.根据权利要求1所述的事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,无迹卡尔曼滤波估计模块在根据航天器沿轨道运动的状态方程和测量方程,结合事件触发模块传输来的当前时刻的地面站测量信息,进行当前时刻的轨道估计时,包括:根据航天器沿轨道运动的状态方程和测量方程,利用上一时刻的轨道估计状态,对当前时刻的轨道状态进行预测,得到当前时刻的轨道状态的预测值;当满足事件触发条件,从事件触发模块获取到当前时刻的地面站测量信息时,从当前时刻的地面站测量信息中获取得到当前时刻的轨道状态的测量值,并使用当前时刻的轨道状态的测量值对当前时刻的轨道状态的预测值进行修正,得到最终的轨道状态估计值并输出;当不满足事件触发条件,未从事件触发模块获取到当前时刻的地面站测量信息时,根据历史时刻的轨道状态的测量值,对下一时刻的轨道状态进行估计。3.根据权利要求2所述的事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,无迹卡尔曼滤波估计模块,还用于:在确定当前轨道偏离航天器预定轨道时,发出指令信号,使星上设备按指令动作。4.根据权利要求1所述的事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,航天器沿轨道运动的状态方程和测量方程表示如下:y
t
=h(x
t
) v
t
其中,系统状态x
t
包含航天器位置向量r=[r
x r
y r
z
]和速度向量v=[v
x v
y v
z
];函数f(
·
)用来描述航天器轨道系统状态模型;h(x
t
)表示测量过程函数,由地面站测量的方位、仰角以及范围确定。5.根据权利要求4所述的事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,对于f(x
t
),有:
其中,μ为地球引力常数,j2为j2摄动,r=||r||表示航天器到中心天体的距离,r
e
为地球赤道半径。6.根据权利要求1所述的事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,事件触发模块,用于:基于如下式(1)对是否满足事件触发条件进行判定:其中,表示k时刻传感器i的测量信息,表示传感器i上一次的测量信息;δ
i
表示传感器i对应的触发阈值;地面站测量信息包括:若干个传感器测量得到的测量信息即m表示传感器的数量;当时,传感器i的测量信息为此时,将传感器i的测量信息传输至无迹卡尔曼滤波估计模块;当时,传感器i的测量信息为此时,没有新的测量信息传输至无迹卡尔曼滤波估计模块。7.根据权利要求6所述的事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,无迹卡尔曼滤波估计模块,具体用于通过如下方式实现当前时刻的轨道估计:获取在第i 1个传感器信息之前的所有信息获取在第i 1个传感器信息之前的所有信息其中,根据贝叶斯法则,计算过程状态的最小均方误差估计根据贝叶斯法则,计算过程状态的最小均方误差估计
当为k时刻传感器i的真实状态的估计值,则可按照如下方式更新下一时刻的轨道状态估计值1)选取sigma点:1)选取sigma点:1)选取sigma点:其中,n表示系统状态维数;2)将sigma点映射到新的sigma点集:3)加权后新的sigma点集用于预测轨道状态的估计值和协方差:3)加权后新的sigma点集用于预测轨道状态的估计值和协方差:其中,权重公式为:其中,权重公式为:λ=α2(n κ)-n式中,表示矩阵的第i列,是表示分布的尺度函数;α表示sigma点集的距离平均点,α和κ用来控制sigma点集的分布;β与x的分布有关,β用于调节方差的准确度,如果x的分布是高斯的,则β=2是最优的选择;4)将sigma点集通过轨道观测函数映射到新的sigma点集:5)加权后新的sigma点集用于预测航天器轨道观测的估计值和协方差:5)加权后新的sigma点集用于预测航天器轨道观测的估计值和协方差:6)轨道状态测量协方差矩阵用于计算滤波器增益:
7)轨道状态更新定义辅助变量那么当时,即事件触发条件满足时,轨道状态估计值及协方差矩阵为:计值及协方差矩阵为:而当即事件触发条件未满足时:即事件触发条件未满足时:其中,至此,完成事件触发的航天器轨道状态估计。8.根据权利要求1所述的事件触发无迹卡尔曼滤波航天器轨道估计器,其特征在于,在测量航天器轨道信息时,通过地面雷达向航天器发一个无线电脉冲信号,航天器上的应答机接收到该无线电脉冲信号后经放大立即向地面发出无线电脉冲应答信号;根据发出的无线电脉冲信号和返回的无线电脉冲应答信号的传播时间,计算得到航天器离地面站的距离,并根据雷达天线的仰角的方位确定航天器的位置。
技术总结
本发明公开了一种事件触发无迹卡尔曼滤波航天器轨道估计器,包括:航天器轨道系统模块,用于建立航天器沿轨道运动的状态方程和测量方程;事件触发模块,用于对是否满足事件触发条件进行判定,根据判定结果,确定是否将当前时刻的地面站测量信息传输至无迹卡尔曼滤波估计模块;无迹卡尔曼滤波估计模块,用于根据航天器沿轨道运动的状态方程和测量方程,结合事件触发模块传输来的当前时刻的地面站测量信息,进行当前时刻的轨道估计,根据当前时刻的轨道估计结果,判断当前轨道是否偏离航天器预定轨道。本发明所述的估计器可以在保证估计效果的前提下,降低通讯率,解决了航天器与地面站信息传输时通讯资源有限的问题。地面站信息传输时通讯资源有限的问题。地面站信息传输时通讯资源有限的问题。
技术研发人员:邹恒光 周钠 张磊 任军强 杨凌轩 陈特 高梓贺 史大威 侯丽君 董宜煊
受保护的技术使用者:中国空间技术研究院
技术研发日:2022.11.16
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。