1.本实用新型属于工厂化养蚕的专用设备领域,具体涉及了一种用于全龄工厂化养蚕物流线的龙门式升降机。
背景技术:
2.传统的养殖方式为家庭式的小作坊养殖方式,一般采用小竹筐饲养,这种小竹筐结构简单,制造方便,可手工编织,成本低廉;小作坊式的养殖是一种全人工的养殖方法,从蚕卵成虫到采茧均通过人为操作实现,费时费力,养殖效率非常低,且受季节条件限制,只能在特定的时间饲养蚕虫,蚕茧的年产量极低,根本无法满足当今社会的需求,已经逐步被社会所淘汰。
3.为了弥补传统作坊式养蚕的不足,规模化、工厂化的养蚕技术应用而生。为了满足规模化养殖的要求,设计了养殖用蚕框与载体等养殖器具,基于该养殖器具能够实现蚕虫养殖、蚕虫在各龄养殖间转移、饲料投放等工序,在工厂化养蚕技术中扮演了重要的角色。而为了实现上述工序,需要配备相应的物流线用以输送养殖器具,在输送过程中完成蚕虫转移、饲料投放等工序,从而实现工厂化物流线式的养蚕,相较于现有的养蚕技术,其效率得到了巨大的提升。
4.在实际养蚕过程中发现,在不同的养蚕工序中存在有不同高度差的物流线与设备,导致养殖器具不能直接在具有高度差之间的物流线之间输送,以及进出料给具有高度差的设备,影响工厂化养蚕作业的连续性,工作效率显著下降。若采用工人配合转移到不同高度差的物流线与设备,则会大大增加工人的劳动强度,且转移的速度慢。
技术实现要素:
5.本实用新型的目的在于提供一种用于全龄工厂化养蚕物流线的龙门式升降机,针对现有技术中存在缺陷,设计了用于提升或下降养殖器具的龙门式升降机,该龙门式升降机包括框架、输送机构与升降机构,输送机构用于送入或送出养殖器具,升降机构用于带动输送机构升降,从而实现高位到低位或低位到高位的转移输送,解决由于不同的物流线与设备存在高度差,而导致无法连续性输送养殖器具的问题。
6.为了解决上述技术问题,采用如下技术方案:
7.一种用于全龄工厂化养蚕物流线的龙门式升降机,其特征在于包括框架、输送机构与升降机构;
8.框架,用于安装输送机构与升降机构;
9.输送机构,用于送入或送出养蚕物流线上的养殖器具;
10.升降机构,用于带动输送机构升降。
11.进一步,框架包括左框架、右框架、框架连接杆,左框架与右框架通过框架连接杆连接。框架作为升降机的结构体,用于安装输送机构、升降机构与导向机构,其结构牢固其稳定,有助于实现持续稳定的升降转运作业。
12.进一步,框架上设有上阻挡器与下阻挡器,分别阻挡输送机构的最高上升位置与最低下降位置。上阻挡器与下阻挡器分别限定了输送机构的最高上升位置与最低下降位置,避免上升过高或下降过低而发生撞击,导致部件损坏,升降转运出现错位。
13.进一步,输送机构为链条式输送机、滚筒式输送机或带式输送机。该输送机构结构简单,且与养殖器具相适配,输送稳定。
14.进一步,输送机构连接有拖链,拖链的另一端连接于框架。拖链能够内置气管、电线等线路或管路,起到牵引与保护的作用,避免其在频繁的升降往复运动中打结或受外界作用力而损坏。此外,拖链的每一节都能打开,便于安装于维修。拖链还具有一定的导向作用,运动时候噪音低、耐磨。
15.进一步,升降机构包括电机、驱动轴与链条组件,电机连接驱动轴,驱动轴连接链条组件,通过链条组件连接输送机构。本实用新型采用链条式的升降机构,电机带动驱动轴旋转,再传动给链条组件,链条组件在传输行进过程中牵引输送机构从而实现驱动升降,具有结构简单,制造方便,低成本的优点。
16.进一步,链条组件包括主动链轮、从动链轮与提升链条,主动链轮连接于驱动轴,主动链轮与从动链轮之间连接提升链条,提升链条连接输送机构。主动链轮由驱动轴驱动旋转,从而带动提升链条在主动链轮与从动链轮之间传输行进,在传输行进过程中带动输送机构升降,该链条组件具有结构简单,制造方便,低成本的优点,升降速度合理,升降过程安全且稳定。
17.进一步,链条组件设置有两组,两组链条组件均连接输送机构,且相互配合。本实用新型设置有两组链条组件,分别位于左框架与右框架上,由驱动轴同步传动,实现两组链条组件的同步传输行进,从而同步牵引输送机构的两侧,使得输送机构受力均匀,提升升降作业的稳定性。
18.进一步,该升降机构还包括有升降托架,升降托架包括支托杆与连杆,支托杆支托输送机构,支托杆连接连杆,连杆连接链条组件,由链条组件带动升降托架。升降托架用于支托输送机构,使其在受力均匀状态下完成升降,提升升降的稳定性。同时升降托架作为导向机构的安装结构,解决升降机构连接导向机构困难的问题,使得整体结构设计巧妙,降低整机制造的难度,整体的结构设置更为合理。
19.进一步,连杆设有链条座,通过链条座连接链条组件。链条座设有链条涨紧螺杆,通过该链条涨紧螺杆连接提升链条,实现链条组件牵引升降托架与输送机构,两者连接牢固。
20.进一步,升降机还包括有导向机构,包括导轨与升降导轮组件,升降导轮组件与导轨相匹配,借助升降导轮组件与导轨导向升降机构。导轨固定于框架,升降导轮组件能够在导轨上滑动,基于该升降导轮组件的定向滑动,实现对升降机构的导向作用,进一步提升升降的稳定性。
21.进一步,升降导轮组件包括导轮座与导轮,导轮安装于导轮座,导轮与导轨相匹配。导轮表面光滑,其在导轨中滑动的摩擦力小,导向滑动过程顺畅,不会对升降动作产生阻碍。
22.进一步,导轮座中设有1-4个导轮。在同一导轮座中设置多个导轮,可以起到导向的限位作用,将多个导轮限位在导轨上,相互之间形成制约关系,从而提升导向的稳定性。
23.进一步,每组导向机构设有1-4个升降导轮组件。设置多个升降导轮组件,可以增加导向作用力,不同的升降导轮组件之间形成相互制约力,进一步提升导向的稳定性。
24.进一步,导向机构设有1-12组。导向机构对称的设置在左框架与右框架上,从多个对称的方向对输送机构的升降进行导向,不仅提升了导向效果,而且提高升降与导向的稳定性。
25.进一步,该升降机还包括有感应机构,感应机构包括光电支架与感应板,光电支架与感应板相互匹配,光电支架固定,感应板跟随输送机构升降。光电支架能够识别感应板,从而感应输送机构的升降高度,光电支架固定设置于目标的高度,根据实际需要,可在不同的高度设置多个,当感应板跟随输送机构达到目标高度时,光电支架对准并识别到感应板,并将识别信号传输给自动化的控制单元,由控制单元控制相应部件并实行相应的操作工序,实现自动化的升降转移工序。
26.由于采用上述技术方案,具有以下有益效果:
27.本实用新型为一种用于全龄工厂化养蚕物流线的龙门式升降机,设计了用于提升或下降养殖器具的龙门式升降机,该龙门式升降机包括框架、输送机构与升降机构,输送机构用于送入或送出养殖器具,升降机构用于带动输送机构升降,从而实现高位到低位或低位到高位的转移输送,解决由于不同的物流线与设备存在高度差,而导致无法连续性输送养殖器具的问题。
28.本实用新型采用链条式的升降机构,电机带动驱动轴旋转,再传动给链条组件,链条组件在传输行进过程中牵引输送机构从而实现驱动升降,具有结构简单,制造方便,低成本的优点。
29.导轨固定于框架,升降导轮组件能够在导轨上滑动,基于该升降导轮组件的定向滑动,实现对输送机构的导向作用,进一步提升升降的稳定性。
30.升降托架用于支托输送机构,使其在受力均匀状态下完成升降,提升升降的稳定性。同时升降托架作为导向机构的安装结构,解决升降机构连接导向机构困难的问题,使得整体结构设计巧妙,降低整机制造的难度,整体的结构设置更为合理。
31.光电支架能够识别感应板,从而感应输送机构的升降高度,光电支架固定设置于目标的高度,根据实际需要,可在不同的高度设置多个,当感应板跟随输送机构达到目标高度时,光电支架对准并识别到感应板,并将识别信号传输给自动化的控制单元,由控制单元控制相应部件并实行相应的操作工序,实现自动化的升降转移工序。
附图说明
32.下面结合附图对本实用新型作进一步说明:
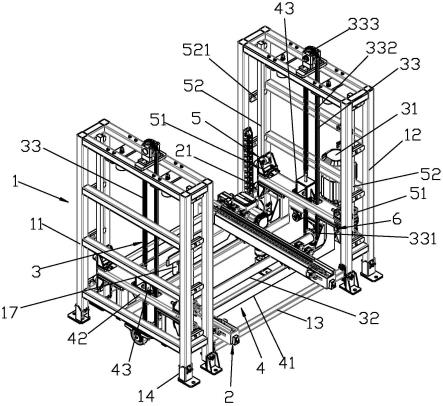
33.图1为本实用新型龙门式升降机的立体结构示意图;
34.图2为本实用新型龙门式升降机的正视方向结构示意图;
35.图3为本实用新型龙门式升降机的侧视方向结构示意图;
36.图4为升降机构的驱动部分结构示意图;
37.图5为升降机构的升降托架结构示意图;
38.图6为导向机构的结构示意图;
39.图7为升降导轮组件的结构示意图;
40.图8为感应机构的安装示意图。
41.其中,框架1、左框架11、右框架12、框架连接杆13、脚座14、下阻挡器15、上阻挡器16、尾部死档17、输送机构2、拖链21、升降机构3、电机31、驱动轴32、链条组件33、主动链轮331、提升链条332、从动链轮333、升降托架4、支托杆41、连杆42、链条座43、链条涨紧螺杆431、导向机构5升降导轮组件51、导轮座511、导轮512、导轨52、导轨连接板521、感应机构6、光电支架61、感应板62。
具体实施方式
42.本实用新型旨在提供一种用于全龄工厂化养蚕物流线的龙门式升降机,设计了用于提升或下降养殖器具的龙门式升降机,该龙门式升降机包括框架、输送机构与升降机构,输送机构用于送入或送出养殖器具,升降机构用于带动输送机构升降,从而实现高位到低位或低位到高位的转移输送,解决由于不同的物流线与设备存在高度差,而导致无法连续性输送养殖器具的问题。
43.下面结合附图1-8对本实用新型的龙门式升降机做详细的说明:
44.一种用于全龄工厂化养蚕物流线的龙门式升降机,包括框架1、输送机构2、升降机构3、导向机构5和感应机构6;
45.框架1,用于安装输送机构2与升降机构3;
46.输送机构2,用于送入或送出养蚕物流线上的养殖器具;
47.升降机构3,用于带动输送机构2升降;
48.导向机构5,对输送机构2的往复升降起到导向作用;
49.感应机构6,用于感应升降托架4与输送机构2的升降高度;
50.框架1包括左框架11、右框架12、框架连接杆13,左框架11与右框架12通过框架连接杆13连接。框架1作为升降机的结构体,用于安装输送机构2、升降机构3、导向机构5与升降托架4,其结构牢固其稳定,有助于实现持续稳定的升降转运作业。左框架11与右框架12的底部安装有脚座14,提高安装的稳定性。
51.输送机构2为链条式输送机,其通过升降托架4安装于左框架11与右框架12之间。该输送机构2结构简单,且与养殖器具相适配,输送稳定。
52.升降机构3包括电机31、驱动轴32与链条组件33,电机31安装于框架1上,其连接驱动轴32;驱动轴32设置于框架1的底部,其连接链条组件33;链条组件33包括主动链轮331、从动链轮333与提升链条332,主动链轮331连接于驱动轴32,从动链轮333安装于框架1的上端,且主动链轮331与从动链轮333上下对齐,提升链条332连接主动链轮331与从动链轮333,提升链条332中间断开,断开的两端分别连接链条座43上下端的链条涨紧螺杆431。
53.本实用新型采用链条式的升降机构3,电机31带动驱动轴32旋转,再传动给主动链轮331,从而带动提升链条332在主动链轮331与从动链轮333之间传输行进,链条组件33在传输行进过程中牵引升降托架4与输送机构2从而实现驱动升降,具有结构简单,制造方便,低成本的优点。
54.链条组件33设置有两组,两组链条组件33分别连接于左框架11和右框架12上;两组链条组件33的主动链轮331均连接于驱动轴32,由其同步带动旋转,两侧的提升链条332则分别连接对应侧的链条座43,在升降过程两组链条组件33相互配合。本实用新型设置有
两组链条组件33,分别位于左框架11与右框架12上,由驱动轴32同步传动,实现两组链条组件33的同步传输行进,从而同步牵引升降托架4的两侧,使得升降托架4与输送机构2受力均匀,提升升降作业的稳定性。
55.该升降机构3还包括升降托架4,升降托架4包括支托杆41与连杆42,支托杆41设有两根,用于支托其上方的输送机构2,支托杆41两端均连接有连杆42,两端的连杆42分别位于左框架11与右框架12,连杆42上安装有链条座43,链条座43的上下端设有链条涨紧螺杆431,通过该链条涨紧螺杆431连接提升链条332,从而由该提升链条332带动升降。升降托架4用于支托输送机构2,使其在受力均匀状态下完成升降,提升升降的稳定性。同时升降托架4作为导向机构5的安装结构,解决升降机构3连接导向机构5困难的问题,使得整体结构设计巧妙,降低整机制造的难度,整体的结构设置更为合理。
56.导向机构5包括导轨52与升降导轮组件51,升降导轮组件51与导轨52相匹配,导轨52通过导轨连接板521固定安装于框架1上,升降导轮组件51安装于升降托架4的连杆42上;升降过程中升降导轮组件51在导轨52上滑动,从而起到对升降托架4与输送机构2的升降导向作用,进一步提升升降的稳定性。
57.升降导轮组件51包括导轮座511与导轮512,导轮座511安装于连杆42,导轮座511安装有该导轮512,导轮512与导轨52相匹配,能够在导轨52上滑动,导轮512表面光滑,其在导轨52中滑动的摩擦力小,导向滑动过程顺畅,不会对升降动作产生阻碍。
58.每一个导轮座511上安装有3个导轮512(如图7所示),其呈三角形状态布置,分别滑动于导轨52的前、左、右三个面上。在同一导轮座511中设置多个导轮512,可以起到导向的限位作用,将多个导轮512限位在导轨52上,相互之间形成制约关系,从而提升导向的稳定性。
59.每组导向机构5设有2个升降导轮组件51,即在同一导轨52上滑动有两个升降导轮组件51(如图6所示),这两个升降导轮组件51分别安装于连杆42的上下端,相互配合导向。设置多个升降导轮组件51,可以增加导向作用力,不同的升降导轮组件51之间形成相互制约力,进一步提升导向的稳定性。
60.该龙门式升降机上设有4组导向机构5,左框架11与右框架12均对称设置有2组该导向机构5,且同侧的两组导向机构5对称设置在框架1的前后端,两组导向机构5的升降导轮组件51对应安装于连杆42的前后端。导向机构5对称的设置在左框架11与右框架12上,从多个对称的方向实现对升降托架4的升降进行导向,不仅提升了导向效果,而且提高升降与导向的稳定性。
61.该升降机还包括有感应机构6,感应机构6包括光电支架61与感应板62,光电支架61与感应板62相互匹配,光电支架61固定于框架1,感应板62连接于连杆42,跟随升降托架4与输送机构2升降。光电支架61能够识别感应板62,从而感应输送机构2的升降高度,光电支架61设有4个,分别固定于4个不同的目标高度,当感应板62跟随升降托架4达到任一目标高度时,光电支架61对准并识别到感应板62,并将识别信号传输给自动化的控制单元,由控制单元控制相应部件并实行相应的操作工序,实现自动化的升降转移工序。
62.为提高识别的准确性,在左框架11与右框架12均设置有一组感应机构6。
63.框架1上设有上阻挡器16与下阻挡器15,分别阻挡输送机构2的最高上升位置与最低下降位置。上阻挡器16与下阻挡器15分别限定了输送机构2的最高上升位置与最低下降
位置,避免上升过高或下降过低而发生撞击,导致部件损坏,升降转运出现错位。
64.输送机构2连接有拖链21,拖链21的另一端连接于框架1。拖链21能够内置气管、电线等线路或管路,起到牵引与保护的作用,避免其在频繁的升降往复运动中打结或受外界作用力而损坏。此外,拖链21的每一节都能打开,便于安装于维修。拖链21还具有一定的导向作用,运动时候噪音低、耐磨。
65.尾部的框架连接杆13上还设有尾部死档17,该尾部死档17包括挡板与气缸,通过气缸控制挡板伸出或收缩,在送入养殖器具时,控制挡板伸出,从而起到阻挡作用。在送出养殖器具时,控制挡板收缩,解除阻挡并出料。
66.本实用新型的升降机工作过程如下:
67.低位转移到高位:
68.1、启动输送机构2,将养殖器具送入,送料到位后输送机构2关闭;
69.2、升降机构3启动,带动升降托架4与输送机构2上升,上升到目标高度后,感应机构6识别到该高度,升降机构3关闭;
70.3、再次启动输送机构2,将养殖器具送入,实现从低位转移到高位。
71.高位转移到低位
72.1、启动输送机构2,将养殖器具送入,送料到位后输送机构2关闭;
73.2、升降机构3启动,带动升降托架4与输送机构2下降,下降到目标高度后,感应机构6识别到该高度,升降机构3关闭;
74.3、再次启动输送机构2,将养殖器具送入,实现从高位转移到低位。
75.以上仅为本实用新型的具体实施例,但本实用新型的技术特征并不局限于此。任何以本实用新型为基础,为解决基本相同的技术问题,实现基本相同的技术效果,所作出地简单变化、等同替换或者修饰等,皆涵盖于本实用新型的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。