1.本实用新型涉及教学用电子实验系统领域,具体涉及用于电子实验箱远程接线的接线装置及配有该接线装置的弱电实验远程接线系统。
背景技术:
2.电子领域的教学需要学生进行实际操作,尤其是自己动手连接电路;不仅可以使学生对知识的掌握更牢固,而且还锻炼了学生的动手能力。因此,各种电子课程的实验箱应运而生,例如:电路原理、数字电路、模拟电路、单片机、嵌入式、通信原理等各种弱电类实验装置;并且不断完善和发展。如果学生不用到校即可通过弱电实验平台实现远程进行电子类实验箱的自由接线,将减轻学生的负担。
技术实现要素:
3.发明人提出一种设想,如果学生在家里或宿舍能够通过远程控制来进行电子实验,将有利于提高教学质量。基于互联网技术远程通信不存在技术障碍,但是,大多数电子类实验设备的信号线接线比较复杂,不仅要考虑正确接线的情况,还需要考虑错误接线的情况;通过远程实现随机的接线存在技术难度。利用机器人、以及可编程控制器实现成本很高,难以在学校普及。如何降低各种实验箱的远程接线,是亟待解决的技术问题。
4.本实用新型的目的是提供一种结构新颖独特,使用方便,并且能够实现对电子实验箱远程接线的弱电实验远程接线系统;具体技术方案为:
5.一种接线装置,包括与信号线接口连接的过渡触点、若干个连接触点,以及电动连接机构;所述电动连接机构设置有旋转臂;所述旋转臂由微型舵机驱动;所述连接触点以所述微型舵机的输出轴为中心,周向排布;所述过渡触点为与所述连接触点同心的圆环状,所述旋转臂设置有连接所述连接触点与所述过渡触点的连接臂。
6.进一步,所述连接机构由微型舵机的摇臂驱动。
7.进一步,所述微型舵机的转角角度为180度。
8.进一步,所述连接臂为簧片或弹簧针连接器。
9.本实用新型还公开了一种弱电实验远程接线系统,包括控制单元以及若干套上述接线装置来实现自动接线。
10.本实用新型弱电实验远程接线系统利用180度转角舵机驱动连接臂选择与过渡触点连接的连接触点,实现了对多连接触点之间的灵活组合;适用于用户远程进行电子类实验箱的自由接线。
附图说明
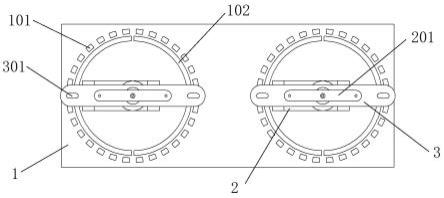
11.图1为本实用新型接线装置结构示意图俯视图;
12.图2为图1轴测图;
13.图3为本实用新型弱电实验远程接线系统的电原理示意图;
14.图4为微型舵机驱动电原理示意图;
15.图5为过渡触点切换电原理示意图。
16.图中:1、主线路板;101、连接触点;102、过渡触点;2、微型舵机;201、摇臂;3、旋转臂;301、连接焊点; 4、弹簧针连接器。
具体实施方式
17.下面利用实施例对本实用新型进行更全面的说明。本实用新型可以体现为多种不同形式,并不应理解为局限于这里叙述的示例性实施例。
18.为了易于说明,在这里可以使用诸如“上”、“下”“左”“右”等空间相对术语,用于说明图中示出的一个元件或特征相对于另一个元件或特征的关系。应该理解的是,除了图中示出的方位之外,空间术语意在于包括装置在使用或操作中的不同方位。例如,如果图中的装置被倒置,被叙述为位于其他元件或特征“下”的元件将定位在其他元件或特征“上”。因此,示例性术语“下”可以包含上和下方位两者。装置可以以其他方式定位(旋转90度或位于其他方位),这里所用的空间相对说明可相应地解释。
19.如图1、图2所示,本实施例中的接线装置,适用于电压低于安全电压的弱电系统;包括与信号线接口连接的过渡触点102、若干个连接触点101,以及电动连接机构;所述电动连接机构设置有旋转臂;所述旋转臂由微型舵机2驱动;所述连接触点101以所述微型舵机2的输出轴为中心,周向排布;所述过渡触点102为与所述连接触点同心的圆环状,所述旋转臂设置有连接所述连接触点与所述过渡触点的连接臂。通过接线装置可以实现1个触点与多达30触点的连接转换。其中过渡触点可以在内环,连接触点在外环,也可以相反。连接触点在外环,在相同的半径下,相邻触点的间隙如果相同,触点的弧长可以更长,有利于提高接触的可靠性。
20.应用于接线切换时,可以将信号线分为两段,断点处为第一信号连接端和第二信号连接端;通过接线装置将第一信号连接端和第二信号连接端短路,即可实现信号线连接;使第一信号连接端和第二信号连接端开路,即可断开信号线。
21.具体操作为:可以将需要连通的第一信号连接端与过渡触点102通过主线路板1的布线进行连接;可以将需要连通的若干个第二信号连接端与各个连接触点101分别通过主线路板1的布线进行连接。当旋转臂3旋转至某个连接触点时,通过连接臂将该连接触点101与过渡触点102连接,即可实现第一信号连接端与第二信号连接端的连接。由于连接装置中过渡触点102可与连接触点101任意连接,可以实现灵活的接线。相对于继电器阵列切换接线的方式,本实施例的方案结构更简单,故障率更低;相对于plc的方案,本实施例的方案,不仅成本更低,维护更方便。
22.微型舵机2采用直流供电,只需要提供pwm信号进行旋转角度的控制,控制方式简单。如图4所示,实施例中采用可调亮度的led驱动芯片为微型舵机2提供pwm信号;由于led驱动芯片驱动电流大,信号抗干扰能力更强。驱动芯片可以选用pca9685pw、lds9003或tlc5940等。
23.最好选用采用串行接口控制的驱动芯片,有利于简化主线路板的布线。
24.旋转臂3可以利用微型舵机2的摇臂201驱动;可以不用再为旋转臂3配置联轴器。
25.还可以采用对称所述微型舵机2选用转角角度为180度的微型舵机;旋转臂以微型
舵机的驱动轴为中心对称设置,避免驱动轴产生弯矩,有利于延长微型舵机2的寿命。为了避免减低触点的数量,过渡触点102分为两个相互绝缘的半环;旋转臂旋转时,分别与半环对应的连接触点进行连接;再增加继电器,通过继电器的触点来切换信号连接端与其中的一个过渡触点连接。如图5所示,连接触点的标号ac1通过双刀双掷开关dm1在标号为pad1的1脚或2脚的两个过渡触点半环之间切换;通过双刀双掷开关,可以提高线路连接的可靠性。为了提高防干扰能力,还可以在连接触点与过渡触点之间串接电阻;例如串接100欧姆的电阻。
26.所述连接臂可以采用簧片;还可以采用弹簧针连接器。采用弹簧针连接器4,可以直接焊接在线路板制成的旋转臂3上,通过连接焊点301连接;加工更方便。
27.如图3所示,本实施例中的接线装置可以组成弱电实验远程接线系统,来实现自动接线。cpu模块作为控制单元,电源模块为控制单元和驱动单元提供电源,
28.使用时,信号线接口可以是引线插孔,通过带有插头的软质或硬质导线将弱电实验箱的输出信号线插孔、输入信号线插孔分别与弱电实验远程接线系统的信号线接口插孔按实验要求一一对应连接。也可以通过电缆来批量连接。这部分不需要学生操作,需要在实验前连接好。
29.实验时,学生可以通过远程系统登录弱电实验远程接线系统的软件界面,点击需要连线的信号输出插孔,再点击信号输入插孔,确认后,完成一根连线操作;按实验要求,逐步将所有连线进行连接。
30.远程系统登录弱电实验远程接线系统在获得学生的连线指令后,由控制单元控制微型舵机2的旋转臂3旋转,将过渡触点与学生选择的连接触点进行连接;实现弱电实验箱的信号线的物理连接。
31.学生可以通过摄像头看到实验的真实结果。通过本实施例中的弱电实验远程接线系统,学生可以在家或宿舍远程进行弱电实验。
32.上述示例只是用于说明本实用新型,除此之外,还有多种不同的实施方式,而这些实施方式都是本领域技术人员在领悟本实用新型思想后能够想到的,故,在此不再一一列举。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
