基于dds协议与lte-v-direct技术的自动驾驶车辆自组网系统及方法
技术领域
1.本发明涉及自动驾驶技术,尤其涉及一种基于dds协议与lte-v-direct技术的自动驾驶车辆自组网系统及方法。
背景技术:
2.近年来,随着数字技术与汽车产业的深度融合,智能网联汽车正在逐渐成为全球汽车产业发展的战略制高点。同时,随着新一代汽车电子电气逐渐集中化,以域架构为基础的多域融合是大趋势。
3.集中化的ee架构是实现软件定义汽车重要的硬件基础,在此基础之上,从车内数个域控制器并存再到高性能计算机hpc的演进过程中,多个域控制器的融合、驾驶域与座舱域的融合成为了必要的趋势。在软件架构层面上,dds/someip等面向服务的软件架构的引进已满足集中化的ee架构的需求。然而,作为以数据为中心的分布式实时通信中间件dds(data distribution service),虽然在一定程度上可以通过qos特性或者可靠传输层协议保障数据进行可靠地分发,但仍然无法全面解决车辆间的通信问题。
4.传统的自动驾驶技术,往往依赖于各类传感器以及ai融合算法来不断完善车辆的感知能力,形成以感知决策为导向的自动驾驶,但对车辆之间的互联互通关注较小。然而单车智能单纯依靠大量堆积各种高端感知设备来实现无死角感知会导致整车成本飙升,而且在自动驾驶算法技术上也面临mpu计算力不足的风险。同时,大量在建基础设施缺乏对专用路侧通信系统等网络设施的顶层设计与部署,从而导致车、人、路三者之间无法实现互联互通,无法满足路侧和应用无人驾驶技术的要求。
5.因此,如何通过车辆自组网实现车辆间智能网联,从而满足相应标准的自动驾驶,则显得尤为重要。
6.基于dds协议和lte-v-direct技术在自动驾驶场景下实现自组网互联互通的技术,很好地弥补了这方面的空缺。
技术实现要素:
7.为解决现有技术中存在的不足,本发明的目的在于,提供一种基于dds协议与lte-v-direct技术的自动驾驶车辆自组网系统及方法,在adas/ad域控制器等车载域控制器中部署支持lte-v-direct技术的t-box/obu单元,利用应用层dds协议,实现车辆之间的自组网。
8.为实现本发明的目的,本发明所采用的技术方案是:
9.一种基于dds协议和lte-v-direct技术的自动驾驶车辆自组网系统,包括adas/ad域控制器、classis/body/powertrain域控制器、ivi/cdc域控制器;三组域控制器各自部署dds中间件,域控制器之间通过dds实现互联互通;
10.adas/ad域控制器上部署t-box单元,t-box单元控制多个ecu单元采集车辆信息,
汇总进行自动驾驶算法决策;
11.adas/ad域控制器还针对自组网部署dds发布节点和接收节点作为车辆之间互联互通的媒介;adas/ad域控制器广播自身车辆信息时,将自身车辆类型、车辆唯一标识码封装到dds报文中;
12.t-box单元中部署用户设备ue,ue通过lte-v-direct技术广播自身车辆信息,同时接收其他车辆广播过来的实时信息;接收并解析dds报文,提取对端车辆类型、车辆唯一标识码,建立自组网车辆拓扑信息表。
13.进一步地,lte-v-direct技术基于用户设备ue的pc5接口实现车辆间的互联互通。
14.进一步地,adas/ad域控制器中的用户设备ue接收到其他车辆广播过来的实时信息,通过查找自组网车辆拓扑信息表,查找到对应的车辆信息,从而提交给t-box单元进行算法决策。
15.进一步地,classis/body/powertrain域控制器侧部署obu/t-box单元,adas/ad域控制器的算法决策结果通过dds中间件发布给classis/body/powertrain域控制器,classis/body/powertrain域控制器通过obu/t-box单元控制多个ecu单元来实现车载必要功能。
16.进一步地,classis/body/powertrain域控制器通过obu/t-box单元采集多个ecu单元的相关信息,并通过dds中间件发布给adas/ad控制器用作算法决策。
17.进一步地,ivi/cdc域控制器通过dds中间件发布自组网指令给adas/ad域控制器。
18.一种基于dds协议和lte-v-direct技术的自动驾驶车辆自组网方法,自组网包括自组网发现阶段和数据传输阶段。
19.进一步地,自组网发现阶段,包括步骤:
20.(1)通过adas/ad域控制器的t-box单元,获取到当前车辆的唯一识别码以及车辆类型信息;
21.(2)通过ivi/cdc域控制器传输而来的相关指令,明确是否需要自组网;如果不需自组网,则返回步骤(1);如果需要自组网,则进入步骤(3);
22.(3)将车辆唯一识别码以及车辆类型信息,封装进dds发现报文;
23.(4)adas/ad域控制器中的t-box单元的ue开启pc5接口广播,将dds发现报文主动发布给射频视距范围内的其他车辆;
24.(5)t-box单元内的ue同时接收其他车辆通过pc5接口广播发布过来的实时信息;解析dds发现报文,提取出车辆唯一识别码和车辆类型信息;并做合法性检查,对于检查通过的信息,根据车辆唯一识别码作为关键字向自组网车辆拓扑信息表中查找对端车辆是否已经被发现过,如果发现过,则丢弃相关消息;
25.(6)对于未被发现过的车辆唯一识别码和车辆类型信息,向adas/ad域控制器本地的t-box单元的自组网车辆拓扑信息表中插入相关信息,以车辆唯一识别码为关键字;进而在adas/ad域控制器本地建立动态自组网络拓扑,形成车用移动信息网络。
26.进一步地,数据传输阶段,包括步骤:
27.(1)adas/ad域控制器上部署的t-box单元控制多个ecu单元采集车辆信息,传输给adas/ad域控制器;
28.(2)adas/ad域控制器中的t-box单元中的算法决策模块将各个ecu获取到的相关
信息进行数据提取并进行算法融合;
29.(3)将提取融合后的相关信息以及车辆周边障碍物信息与车辆唯一识别码一起作为封装进dds数据报文内;
30.(4)adas/ad域控制器中的t-box单元的ue开启pc5接口广播,将封装的dds发现报文主动发布给射频视距范围内的其他车辆;
31.(5)t-box单元内的ue同时接收周围其他车辆通过pc5接口广播发布过来的实时信息,解析dds数据报文,提取出车辆唯一识别码和车辆信息以及车辆周边障碍物的信息;并做合法性检查,对于检查通过的信息,根据车辆唯一识别码作为关键字向自组网车辆拓扑信息表中查找对端车辆是否已经被发现过,如果未被发现过,则丢弃相关消息;如果已发现,则将数据提交给adas/ad域控制器中的t-box单元进行数据处理;
32.(6)adas/ad域控制器中的t-box单元中的算法决策模块,对远端车辆信息以及车辆周边障碍物信息进行处理后,进行自动驾驶决策,并将相关决策信息,通过dds协议传输给其他域控制器,以控制相关的ecu的行为。
33.进一步地,所述方法适用于中央化架构,将相对应的t-box/obu单元移交至中央计算机。
34.本发明的有益效果在于,与现有技术相比,本发明利用集中化的ee域架构,通过在adas/ad域控制器的t-box单元内挂载lte-v-direct技术所需的ue,集成dds实时传输协议以及lte-v-direct短程分布式直通通信技术,与射频视距范围内的车联形成动态的自组网络,极大地提高了车辆间实时信息共享的时效性。
35.本发明可以使得自动驾驶车辆实现前向碰撞告警、紧急车辆提醒、减速避障、切换路线、自适应巡航等其他合理操作,保障自动驾驶的运行安全。同时通过lte-v-direct技术,无需enb基站的铺设,从而保障了相关车辆在基础设施缺乏的场景下依然能够互联互通。
36.本发明使用通过dds发布订阅协议的实时数据传输以及lte-v-direct低延迟、高可靠的无线通信技术,保障了自动驾驶应用场景和车辆自组网络的通信实时性要求。
37.本发明利用dds协议与数据为中心的发布订阅机制,保障了车辆自组网络的快速建立,同时域控制器之间的通信采用了dds协议,也为自动驾驶算法提供了快速的决策信息的输入。
附图说明
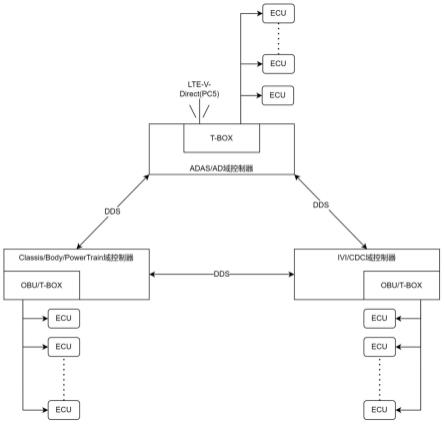
38.图1是本发明所述的基于dds协议和lte-v-direct技术的自动驾驶车辆自组网系统示意图;
39.图2是adas/ad域控制器与classis/body/powertrain域控制器之间交互示意;
40.图3是车辆组网示意图;
41.图4是自组网发现阶段流程示意图;
42.图5是自组网数据传输阶段流程示意图。
具体实施方式
43.下面结合附图和实施例对本发明的技术方案作进一步的说明。以下实施例仅用于
更加清楚地说明本发明的技术方案,而不能以此来限制本技术的保护范围。
44.如图1所示,本发明所述的基于dds协议和lte-v-direct技术的自动驾驶车辆自组网系统,包括三组域控制器,分别是adas/ad域控制器、classis/body/powertrain域控制器、ivi/cdc域控制器。
45.adas/ad域控制器一般用于自动驾驶的感知系统。classis/body/powertrain域控制器一般用于车辆的车身、底盘和动力系统。ivi/cdc域控制器一般用于车辆的座舱系统。
46.与传统的汽车电子电气架构相比,域架构和中央化架构是大势所趋。本发明基于域架构而实现,对于中央化架构,只需将相对应的t-box/obu单元移交至中央计算机即可。
47.随着汽车电子电气架构的不断发展,当前域架构通常采用dds/someip作为域控制器之间数据传输的中间件。如图1所示,三组域控制器各自都部署了dds,域控制器之间通过dds实现互联互通。
48.对于adas/ad域控制器组,classis/body/powertrain域控制器组以及ivi/cdc域控制器组允许obu单元/t-box单元二选一,通过obu单元/t-box单元,可以实现对ecu的控制。
49.本发明实施例中,对于adas/ad域控制器组,则采用t-box更为有效。adas/ad域控制器侧的t-box可以通过“短程分布式直通通信”(lte-v-direct)向外广播报文。
50.如图2所示,本发明以adas/ad域控制器与classis/body/powertrain域控制器之间的交互作为样例。
51.对于adas/ad域控制器侧,其部署了dds中间件和t-box单元。t-box单元控制多个ecu,如激光雷达/毫米波雷达、摄像头以及gnss、rtk和惯导系统。这些ecu采集到的信息通过t-box汇总,并进行自动驾驶算法融合与决策。同时t-box单元中部署了ue(用户设备)。ue作为lte-v-direct技术对外广播和接收信息的必要设备,可以支持pc5接口,实现车辆间数据的直接传输。lte-v-direct技术的实现方式为pc5接口(prose direct communication,prose直接通信)。
52.对于classis/body/powertrain域控制器侧,其部署了dds中间件和obu单元/t-box单元。obu单元通过obu诊断接口控制ecu,而t-box单元可以直接控制ecu。两者之间并无功能上的大量差异。通过obu单元/t-box单元可以控制ecu,从而实现发动机控制、转向控制、电池管理、电子稳定等车载必要功能。
53.adas/ad域控制器侧部署的dds应用可以与classis/body/powertrain域控制器侧部署的dds应用之间互联互通。通过dds中间件可以实现请求响应、事件通知等soa功能。
54.如图3所示,由于可以互联的汽车上都安装了adas/ad域控制器,则每辆车上都至少有一台ue可以向外广播并接收pc5接口数据。pc5接口可以在射频视距范围内通信。
55.通过图1、图2、图3对于基于dds协议和lte-v-direct技术的自动驾驶车辆自组网系统的描述。可以明确以下信息:
56.1.域控制器之间可以部署dds发布节点和接收节点作为域控制器之间通信的媒介。adas/ad域控制器需要针对自组网部署dds发布节点和接收节点作为车辆之间互联互通的媒介。
57.2.adas/ad域控制器可以根据相应的算法决策结果,通过dds中间件发布给classis/body/powertrain域控制器,从而要求其上的obu/t-box单元对ecu进行控制来实
现加减速等功能。classis/body/powertrain域控制器可以通过obu/t-box单元采集ecu相关信息,并通过dds中间件发布给adas/ad控制器用作算法决策。
58.3.adas/ad域控制器的t-box单元可以通过激光雷达/毫米波雷达、摄像头、gnss rtk 惯导系统单元分别采集车辆周围环境中的汽车信息、行人信息以及车辆所处的位置、方向、速度信息。
59.4.lte-v-direct技术作为“短程分布式直通通信”可以基于pc5接口实现车辆间的互联互通。
60.5.dds协议报文可以通过车载以太网和pc5接口传输。其中车载以太网依赖的硬件设备为网卡,pc5接口传输依赖的硬件设备为ue。
61.6.adas/ad域控制器通过pc5接口广播自身车辆信息时,可以将自身车辆类型、车辆唯一标识码等信息封装到应用层的dds发现报文中;再通过adas/ad域控制器中的ue单元的pc5接口广播,主动发布给射频视距范围内的其他车辆。adas/ad域控制器中的ue单元同时也可以接收其他车辆通过pc5接口广播过来的实时信息,解析dds报文,提取对端车辆类型、车辆唯一标识码建立自组网车辆拓扑信息表。
62.7.adas/ad与控制器通过pc5接口广播自身车辆信息时,可以将自身车辆位置、车辆唯一标识码、周边情况等信息封装到应用层的dds数据报文中;再通过adas/ad域控制器中的ue单元的pc5接口广播,主动发布给射频视距范围内的其他车辆。adas/ad域控制器中的ue单元接收到其他车辆通过pc5接口广播过来的实时信息,通过查找自组网车辆拓扑信息表,查找到对应的车辆信息,从而提交给t-box进行算法决策。
63.本发明所述的基于dds协议和lte-v-direct技术的自动驾驶车辆自组网方法分为发现阶段和数据传输阶段。
64.如图4所示,自组网发现阶段,包括步骤:
65.(1)通过adas/ad域控制器的t-box单元,获取到当前车辆的唯一识别码以及车辆类型信息;
66.(2)通过ivi/cdc域控制器传输而来的相关指令,明确是否需要自组网。如果不需自组网,则返回步骤(1);如果需要自组网,则进入步骤(3);
67.(3)将车辆唯一识别码以及车辆类型信息,封装进dds发现报文;
68.(4)adas/ad域控制器中的t-box单元的ue开启pc5接口广播,步骤(3)封装的dds发现报文作为pc5接口广播的数据内容,主动发布给射频视距范围内的其他车辆,射频视距范围一般在200m左右;
69.(5)adas/ad域控制器中的t-box单元内的ue,同时接收周围其他车辆通过pc5接口广播发布过来的实时信息。先解析dds发现报文,提取出车辆唯一识别码(vehicle identification number,vin)和车辆类型信息。然后针对接收到的信息,做合法性检查,比如是否符合射频视距范围,是否为非ue发送的非法消息等。对于检查不通过的非法广播消息,直接丢弃,防止占用资源。对于检查通过的信息,根据车辆唯一识别码作为关键字向自组网车辆拓扑信息表中查找对端车辆是否已经被发现过,如果发现过,则丢弃相关消息。
70.(6)对于未被发现过的车辆唯一识别码和车辆类型信息,向adas/ad域控制器本地的t-box单元的自组网车辆拓扑信息表中插入相关信息,以车辆唯一识别码为关键字。进而在adas/ad域控制器本地建立动态自组网络拓扑,形成vanet(车用移动信息网络)。同时,由
于在dds的发现报文中填充了车辆唯一识别码以及车辆类型信息,则本地车辆的adas/ad域控制器的dds节点与远端车辆的adas/ad域控制器的dds节点之间相互发现并且匹配。自此自组网发现阶段完成。自组网发现阶段在车辆的行驶过程中周期性地通过ue向外广播pc5接口的数据。
71.如图5所示,自组网数据传输阶段,包括步骤:
72.(1)adas/ad域控制器中的t-box单元通过控制车载雷达传感器,可以为激光雷达或者毫米波雷达,可以获取当前车辆周围环境中的自动驾驶所需的障碍物信息,传输给adas/ad域控制器。
73.adas/ad域控制器中的t-box单元通过控制车载摄像传感器,可以获取当前车辆近距离中自动驾驶所需的红绿灯、行人等信息,传输给adas/ad域控制器。
74.adas/ad域控制器中的t-box单元通过控制车载gnss、rtk和惯导系统,可以获取当前车辆所处的精准位置信息、行车方向信息,传输给adas/ad域控制器。
75.(2)adas/ad域控制器中的t-box单元中的算法决策模块将各个ecu获取到的相关信息进行数据提取并且通过ai算法进行融合。
76.(3)将提取融合后的相关信息比如车辆的位置、速度、方向信息以及车辆周边障碍物的信息与车辆唯一识别码一起作为主题数据封装进dds数据报文内。
77.(4)adas/ad域控制器中的t-box单元的ue开启pc5接口广播,步骤(3)封装的dds发现报文作为pc5接口广播的数据内容,主动发布给射频视距范围内的其他车辆,射频视距范围一般在200m左右。
78.(5)adas/ad域控制器中的t-box单元内的ue,同时接收周围其他车辆通过pc5接口广播发布过来的实时信息。解析dds数据报文,提取出车辆唯一识别码(vehicle identification number,vin)和车辆的位置、速度、方向信息以及车辆周边障碍物的信息。然后针对接收到的信息,做合法性检查,比如是否符合射频视距范围,是否为非ue发送的非法消息等。对于检查不通过的非法广播消息,直接丢弃,防止占用资源。对于检查通过的信息,根据车辆唯一识别码作为关键字向自组网车辆拓扑信息表中查找对端车辆是否已经被发现过,如果未被发现过,则丢弃相关消息。如果已发现,则将数据提交给adas/ad域控制器中的t-box单元进行数据处理。
79.(6)adas/ad域控制器中的t-box单元中的算法决策模块,对远端车辆的位置、速度、方向信息以及车辆周边障碍物的信息进行处理后,决策当前车辆所处位置是否涉及到前向碰撞告警、紧急车辆提醒、自适应巡航以及编队行驶等自动驾驶业务场景,将相关决策信息,通过dds协议传输给其他域控制器比如classis/body/powertrain域控制器,以控制相关的ecu的行为,譬如控制转向ecu以实现避障、控制发动机ecu以实现转速降低、控制刹车ecu以实现减速。
80.综上所述,通过图1、图2、图3描述了基于dds协议和lte-v-direct技术的自动驾驶车辆自组网系统。通过图4、图5描述了基于dds协议和lte-v-direct技术的自动驾驶车辆自组网方法。
81.本发明的有益效果在于,与现有技术相比,本发明利用集中化的ee域架构,通过在adas/ad域控制器的t-box单元内挂载lte-v-direct技术所需的ue,集成dds实时传输协议以及lte-v-direct短程分布式直通通信技术,与射频视距范围内的车联形成动态的自组网
络,极大地提高了车辆间实时信息共享的时效性。
82.本发明可以使得自动驾驶车辆实现前向碰撞告警、紧急车辆提醒、减速避障、切换路线、自适应巡航等其他合理操作,保障自动驾驶的运行安全。同时通过lte-v-direct技术,无需enb基站的铺设,从而保障了相关车辆在基础设施缺乏的场景下依然能够互联互通。
83.本发明使用通过dds发布订阅协议的实时数据传输以及lte-v-direct低延迟、高可靠的无线通信技术,保障了自动驾驶应用场景和车辆自组网络的通信实时性要求。
84.本发明利用dds协议与数据为中心的发布订阅机制,保障了车辆自组网络的快速建立,同时域控制器之间的通信采用了dds协议,也为自动驾驶算法提供了快速的决策信息的输入。
85.本发明申请人结合说明书附图对本发明的实施示例做了详细的说明与描述,但是本领域技术人员应该理解,以上实施示例仅为本发明的优选实施方案,详尽的说明只是为了帮助读者更好地理解本发明精神,而并非对本发明保护范围的限制,相反,任何基于本发明的发明精神所作的任何改进或修饰都应当落在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。