1.本发明涉及一种遮蔽设备的机电致动器,换言之,涉及一种用于遮蔽设备的机电致动器。
2.本发明还涉及一种包括轨道和百叶窗的遮蔽设备。百叶窗由位于轨道内部的这种机电致动器驱动移动。
背景技术:
3.通常,本发明涉及遮蔽设备的领域,遮蔽设备包括使百叶窗在至少第一位置和至少第二位置之间移动的电动驱动设备。
4.电动驱动设备包括可移动的防晒元件或封闭元件的机电致动器,可移动的防晒元件或封闭元件诸如具有板条的卷帘、折叠的卷帘或其他等同材料,并且在下文中被称为百叶窗。
5.wo 2010/011751a1是已知的,该文献描述了遮蔽设备的机电致动器。机电致动器包括第一电动机和第二电动机、连接轴、齿轮箱、输出轴以及电子控制单元。第一电动机和第二电动机中的每一个包括旋转轴。第一电动机和第二电动机中的每一个的旋转轴被构造成围绕旋转轴线旋转。第一电动机的旋转轴经由连接轴联接到第二电动机的旋转轴。第一电动机和第二电动机被配置成由电子控制单元控制。此外,第二电动机被机械地连接到齿轮箱,齿轮箱被机械地连接到输出轴。
6.然而,这种机电致动器的缺点是该机电致动器仅具有一个齿轮箱和一个输出轴,该一个齿轮箱和一个输出轴位于机电致动器的同一侧。
7.因此,机电致动器仅可以驱动遮蔽设备的被布置在机电致动器的一个端部处的一个驱动轴。
8.以这种方式,机电致动器通过联接到单个输出轴的单个齿轮箱将旋转驱动扭矩传递到驱动轴。
9.因此,机电致动器的这种结构会导致机电致动器的部件的磨损和损坏。
10.此外,机电致动器的这种结构要求单个齿轮箱是过大尺寸的,以将由两个电动机输送的扭矩传递到单个输出轴。
11.因此,这种机电致动器不太适合于具有大的尺寸和重的重量的百叶窗。
12.此外,机电致动器的这种结构仅使得机电致动器能够沿轨道的纵向方向安装在轨道的一个端部附近。
13.此外,特别地由于电子控制单元的长度,这种机电致动器沿轨道的纵向方向具有相当长的长度,该机电致动器被构造成安装在该轨道内。
14.因此,机电致动器的这种长度并不总是与轨道内部可用的空间兼容。
15.wo 2012/085252 a1也是已知的,该文献描述了遮蔽设备的电动驱动设备。电动驱动设备包括第一齿轮电动机和第二齿轮电动机、第一输出轴和第二输出轴以及电子控制单
元。此外,第一齿轮电动机的输出轴经由两个驱动轴、两个轮子和遮蔽设备的百叶窗的卷绕管机械地连接到第二齿轮电动机的输出轴。电子控制单元被布置在第二齿轮电动机的容置部的内部或被附接到侧元件,特别是被附接到凸缘,该侧元件被布置在卷绕管的一个端部处,并且作为用于第一齿轮电动机或第二齿轮电动机的附接支撑件。第一齿轮电动机和第二齿轮电动机的输出轴之间的连接,特别是通过卷绕管的连接是刚性的,如果第一齿轮电动机和第二齿轮电动机的输出轴未对准,这会导致卡住。
16.本发明旨在解决上述缺点,并且旨在提供一种遮蔽设备的机电致动器以及一种包括这种机电致动器的遮蔽设备,从而使得遮蔽设备的具有大的尺寸和重的重量的百叶窗能够移动,同时使遮蔽设备的轨道内部的机电致动器的空间需求最小化,以确保机电致动器的可靠性并且使获得该机电致动器的成本最小化。
技术实现要素:
17.为此,根据第一方面,本发明涉及一种遮蔽设备的机电致动器,
18.该机电致动器至少包括:
[0019]-第一电动机和第二电动机,第一电动机和第二电动机中的每一个包括旋转轴,第一电动机和第二电动机中的每一个的旋转轴被构造成围绕旋转轴线旋转,
[0020]-连接轴,第一电动机的旋转轴经由连接轴联接到第二电动机的旋转轴,
[0021]-第一齿轮箱,
[0022]-第二齿轮箱,
[0023]-第一输出轴,
[0024]-第二输出轴,以及
[0025]-电子控制单元,第一电动机和第二电动机被配置成由电子控制单元控制。
[0026]
第一电动机被机械地连接到第一齿轮箱,并且第一齿轮箱被机械地连接到第一输出轴。
[0027]
此外,第二电动机被机械地连接到第二齿轮箱,并且第二齿轮箱被机械地连接到第二输出轴。
[0028]
根据本发明,电子控制单元沿旋转轴线布置在第一电动机和第二电动机之间。连接轴沿旋转轴线延伸穿过包括电子控制单元的机电致动器的区域。
[0029]
机电致动器还至少包括:
[0030]-第一万向接头,以及
[0031]-第二万向接头。
[0032]
第一电动机通过第一万向接头接合到连接轴。此外,第二电动机通过第二万向接头接合到连接轴。
[0033]
因此,机电致动器的这种结构使得遮蔽设备的具有大的尺寸和重的重量的百叶窗能够移动,同时以减小的尺寸容纳在遮蔽设备的轨道的内部,从而保证了机电致动器的可靠操作并且使获得该机电致动器的成本最小化。
[0034]
以这种方式,机电致动器能够传递大的扭矩,使得遮蔽设备的具有大的尺寸和重的重量的百叶窗可以移动,而同时具有小的空间需求,使得机电致动器可以安装在具有小的高度和深度的轨道中。
[0035]
此外,机电致动器的这种结构使得机电致动器能够安装在不同尺寸的轨道中,从而使由机电致动器制造商携带的机电致动器产品类型的数量最小化。
[0036]
此外,机电致动器的这种结构使得机电致动器能够沿轨道的纵向方向安装在轨道内的任何位置,也就是说,安装在轨道的中心位置和轨道的一个端部附近。
[0037]
根据本发明的有利特征,机电致动器还包括单个制动器。
[0038]
根据本发明的另一个有利特征,制动器被布置在第一电动机和第一齿轮箱之间,并且被刚性地连接到第一电动机和第一齿轮箱。机电致动器还包括接口元件。此外,接口元件被布置在第二电动机和第二齿轮箱之间,并且被刚性地连接到第二电动机和第二齿轮箱。
[0039]
根据本发明的另一个有利特征,机电致动器还包括第一壳体和第二壳体。
[0040]
根据本发明的另一个有利特征,第一电动机和第二电动机是相同的。第一齿轮箱和第二齿轮箱是相同的。此外,第一壳体和第二壳体是相同的。
[0041]
根据本发明的另一个有利特征,第一电动机和第一齿轮箱被布置在第一壳体的内部。此外,第二电动机和第二齿轮箱被布置在第二壳体的内部。
[0042]
根据本发明的有利特征,机电致动器还包括容置部。容置部包括第一端部和第二端部,第二端部与第一端部相对。此外,容置部沿旋转轴线布置在第一壳体和第二壳体之间,并且被刚性地连接到第一壳体和第二壳体中的每一个。
[0043]
根据本发明的另一个有利特征,第一电动机和第一齿轮箱沿旋转轴线从容置部的第一端部起布置在容置部的延伸部中。此外,第二电动机和第二齿轮箱沿旋转轴线从容置部的第二端部起布置在容置部的延伸部中。
[0044]
根据本发明的另一个有利特征,连接轴沿旋转轴线延伸穿过容置部。
[0045]
根据本发明的另一个有利特征,电子控制单元被布置在容置部的内部。
[0046]
根据本发明的另一个有利特征,机电致动器还包括计数设备。计数设备包括磁轮和至少一个霍尔效应传感器。此外,磁轮被安装在连接轴上。
[0047]
根据本发明的另一个有利特征,机电致动器被构造成联接到第一驱动轴和第二驱动轴,第一驱动轴和第二驱动轴是分开的。此外,第一输出轴和第二输出轴中的每一个被构造成机械地连接到第一驱动轴或第二驱动轴。
[0048]
根据第二方面,本发明涉及一种遮蔽设备,该遮蔽设备包括轨道和百叶窗。根据本发明并且如上所述,百叶窗由被布置在轨道内的机电致动器驱动移动。
[0049]
该遮蔽设备具有与关于根据本发明的机电致动器的上述特征和优点相似的特征和优点。
附图说明
[0050]
通过以下作为非限制性示例给出的详细说明并且参照附图,本发明的其他特征和优点将变得明显:
[0051]
[图1]图1是根据本发明的实施例的具有可定向的板条的卷帘的一部分的示意性透视图;
[0052]
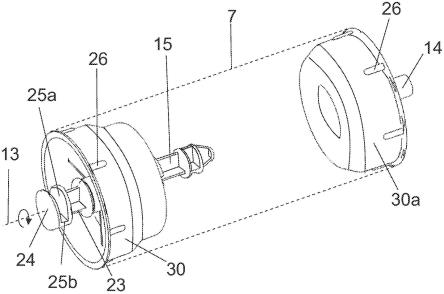
[图2]图2是图1所示的具有可定向的板条的卷帘的机电致动器的示意性透视图;
[0053]
[图3]图3是从180
°
旋转角度观察的图2所示的机电致动器的示意性分解透视图;
[0054]
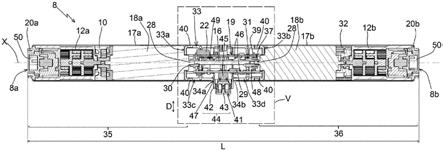
[图4]图4是图2和图3所示的机电致动器的轴向横截面视图;以及
[0055]
[图5]图5是图4中细节v的放大详细视图。
具体实施方式
[0056]
首先,参照图1,根据本发明的实施例,描述了安装在建筑物(未示出)中的家庭自动化设施100,该家庭自动化设施包括开口,该开口可以是窗户或门,该开口配备有属于遮蔽设备1的百叶窗2,特别是具有板条的卷帘。
[0057]
在未示出的变型中,遮蔽设备1尤其可以是折叠的卷帘。
[0058]
优选地,遮蔽设备1位于建筑物的内部。
[0059]
在变型中,遮蔽设备1位于建筑物的外部。
[0060]
参照图1,描述了根据本发明的实施例的具有可定向的板条的卷帘。
[0061]
遮蔽设备1包括板条3,特别是可定向的板条。遮蔽设备1还包括负荷杆4。这里,百叶窗2由板条3和负荷杆4形成。负荷杆4用于向百叶窗2施加张力。
[0062]
实际上,在家庭自动化设施100中的遮蔽设备1的组装构型中,负荷杆4被附接到百叶窗2的下端部。
[0063]
在未示出的变型中,百叶窗2包括最后的板条而不是负荷杆4,该最后的板条可以被加重。
[0064]
遮蔽设备1包括驱动绳5,该驱动绳被构造成使得板条3和负荷杆4能够竖直移动。驱动绳5还可以被称为系带。
[0065]
实际上,板条3分别包括未示出的用于每个驱动绳5穿过的开口。
[0066]
在图1所示的实施例中,遮蔽设备1还包括定向绳6,该定向绳被构造成使得板条3能够定向。定向绳6还被称为抽绳。
[0067]
有利地,在家庭自动化设施100中的遮蔽设备1的组装构型中,百叶窗2的每个板条3靠置在定向绳6的一部分上,特别是靠置在可以被称为杆的水平部分上,该百叶窗的每个板条连接两股定向绳6,特别是竖直的两股定向绳。
[0068]
因此,定向绳6确保百叶窗2的板条3在竖直方向上均匀地间隔开。
[0069]
使板条3定向尤其使得能够调节建筑物中的房间内部的亮度。
[0070]
当百叶窗2和特别是负荷杆4升起时,板条3被叠置在负荷杆4上,从而板条形成堆叠部。
[0071]
在未示出的一个示例中,遮蔽设备1包括两个滑动件。滑动件中的每一个沿遮蔽设备1的百叶窗2的一侧布置。滑动件被构造成与百叶窗2的板条3配合,以在百叶窗2被折叠和展开时引导板条3。
[0072]
在同样未示出的另一个示例中,板条3的引导件由两个缆绳制成。缆绳中的每一个沿遮蔽设备1的百叶窗2的一侧布置。
[0073]
遮蔽设备1还包括电动驱动设备7。
[0074]
电动驱动设备7包括机电致动器8。机电致动器8使得百叶窗2能够在竖直移动中移动,特别是使得板条3和负荷杆4能够在竖直移动中降低或升高,换言之,使得百叶窗2能够在竖直移动中展开或折叠。机电致动器8还使得板条3能够定向。
[0075]
遮蔽设备1包括轨道9,在遮蔽设备1的组装构型中,电动驱动设备7和特别是机电
致动器8被布置在轨道9内。
[0076]
在遮蔽设备1的组装构型中,轨道9被布置在百叶窗2的上方,换言之,被构造成布置在百叶窗2的上方。
[0077]
通常,轨道9被布置在建筑物的开口的上方,或布置在建筑物的开口的顶部处。
[0078]
有利地,轨道9包括底壁9a和两个侧壁9b。
[0079]
在图1所示的组装模式中,轨道9具有u形的横截面。
[0080]
电动驱动设备7包括多个滚轮。滚轮被构造成使驱动绳5卷绕和解开,从而引起板条3和负荷杆4的竖直移动。
[0081]
这里,电动驱动设备7包括两个滚轮,这两个滚轮在图1中不可见。
[0082]
滚轮的数量不是限制性的并且可以是不同的,特别是多于两个。
[0083]
驱动绳5一方面连接到负荷杆4,另一方面连接到滚轮。
[0084]
实际上,在家庭自动化设施100中的遮蔽设备1的组装构型中,每个驱动绳5的下端部被连接到负荷杆4,每个驱动绳5的上端部被连接到滚轮中的一个。
[0085]
优选地,滚轮被布置在轨道9的内部。
[0086]
有利地,电动驱动设备7包括倾斜设备13,通常被称为“倾斜器”。滚轮被分别布置在倾斜器13的内部。这就是为什么滚轮在图1中不可见。
[0087]
此外,在遮蔽设备1的组装构型中,倾斜器13被布置在轨道9的内部,换言之,被构造成布置在轨道9的内部。
[0088]
在图1所示的实施例中,电动驱动设备7包括两个倾斜器13。
[0089]
倾斜器的数量不是限制性的并且可以是不同的,特别是多于两个。如果倾斜器的数量为两个或更多个,机电致动器可以被布置在倾斜器中的两个倾斜器之间。
[0090]
这里,倾斜器13被布置在机电致动器8的两侧。优选地,每个倾斜器13沿轨道9的纵向方向布置在轨道的一个端部附近。
[0091]
倾斜器13被构造成以有限的旋转角度使定向绳6旋转,以使板条3定向。
[0092]
有利地,电动驱动设备7由控制单元控制。控制单元例如可以是本地控制单元14。
[0093]
本地控制单元14可以经由有线或无线连接件连接到中央控制单元15。中央控制单元15控制本地控制单元14和分布在整个建筑物中的其他类似的本地控制单元。
[0094]
优选地,电动驱动设备7被配置成执行用于使遮蔽设备1的百叶窗2移动、特别是升高或降低以及最终定向的命令,该命令尤其可以由本地控制单元14或中央控制单元15发出。
[0095]
家庭自动化设施100包括本地控制单元14或中央控制单元15,或本地控制单元14和中央控制单元15两者。
[0096]
如图3所示,用于控制机电致动器8的装置至少包括电子控制单元19,用于控制机电致动器的装置使得遮蔽设备1的百叶窗2能够移动以及使得百叶窗2的板条3能够定向。电子控制单元19适于操作机电致动器8的两个电动机18a、18b,并且特别地,适于使得能够向电动机18a、18b供应电能。这两个电动机18a、18b在下文中被称为第一电动机18a和第二电动机18b。
[0097]
因此,如前所述,电子控制单元19尤其控制第一电动机18a和第二电动机18b,以使百叶窗2打开或关闭以及使百叶窗2的板条3定向。
[0098]
有利地,电子控制单元19至少包括特别是用于接收命令的第一通信模块22,该命令通过诸如本地控制单元14或中央控制单元15的命令发射器发出,这些命令旨在控制电动驱动设备7。
[0099]
有利地,电子控制单元19的第一通信模块22是无线的。特别地,第一通信模块22被配置成接收无线电命令。
[0100]
有利地,第一通信模块22还可使得能够接收通过有线装置发送的命令。
[0101]
有利地,电子控制单元19、本地控制单元14和/或中央控制单元15可以与位于建筑物的内部或远离建筑物的外部的气象站(未示出)通信,气象站尤其包括一个或多个传感器,该一个或多个传感器可以被配置成在气象站位于建筑物的外部的情况下例如确定温度、亮度或风速。
[0102]
电子控制单元19、本地控制单元14和/或中央控制单元15还可以与服务器27通信,以根据经由通信网络(特别是可以连接到服务器27的互联网网络)远程提供的数据来控制机电致动器8。
[0103]
电子控制单元19可以由本地控制单元14或中央控制单元15控制。本地控制单元14或中央控制单元15设置有控制键盘。本地控制单元14或中央控制单元15的控制键盘包括一个或多个选择元件24以及最终包括一个或多个显示元件25。
[0104]
作为非限制性示例,选择元件可以是按钮或触敏键,显示元件可以是发光二极管、液晶显示器(liquid crystal display,lcd)或薄膜晶体管(thin film transistor,tft)显示器。选择元件和显示元件还可以通过触摸屏来实现。
[0105]
有利地,本地控制单元14或中央控制单元15至少包括第二通信模块23。
[0106]
因此,本地控制单元14或中央控制单元15的第二通信模块23被配置成发送命令,换言之,发送命令,特别是通过无线装置(例如,无线电)或通过有线装置发送命令。
[0107]
此外,本地控制单元14或中央控制单元15的第二通信模块23还可以被配置成接收命令,换言之,接收命令,特别是经由相同的装置接收命令。
[0108]
本地控制单元14或中央控制单元15的第二通信模块23被配置成与电子控制单元19的第一通信模块22通信,换言之,与电子控制单元19的第一通信模块22通信。
[0109]
因此,本地控制单元14或中央控制单元15的第二通信模块23与电子控制单元19的第一通信模块22单向地或双向地交换命令。
[0110]
有利地,本地控制单元14是可以是固定的或移动的控制点。固定的控制点可以是控制箱,该控制箱旨在固定在建筑物的墙壁的表面上或固定在窗框或门框的面上。移动的控制点可以是遥控器、智能手机或平板电脑。
[0111]
有利地,本地控制单元14或中央控制单元15还包括控制器26。
[0112]
控制机电致动器8的装置包括硬件和/或软件装置。
[0113]
作为非限制性示例,如图3所示,硬件装置可以包括至少一个微控制器29。
[0114]
电动驱动设备7(特别是电子控制单元19)优选地被配置成执行用于控制遮蔽设备1的百叶窗2的移动(特别是控制遮蔽设备的百叶窗的展开或折叠)的命令以及用于控制板条3的定向的命令。这些命令可以例如由本地控制单元14或由中央控制单元15发出。
[0115]
电动驱动设备7可以由使用者控制,例如由使用者通过接收与按压本地控制单元14或中央控制单元15的选择元件24中的该选择元件或一个选择元件对应的命令来控制。
[0116]
电动驱动设备7还可以自动控制,例如通过接收与来自至少一个传感器21的至少一个信号和/或来自电子控制单元19(特别是微控制器29)的时钟(未示出)的信号对应的命令来自动控制。传感器21和/或时钟可以被集成在本地控制单元14或中央控制单元15中。
[0117]
参照图2至图5,现在更详细地描述图1的遮蔽设备1的包括机电致动器8的电动驱动设备7。
[0118]
机电致动器8包括第一电动机18a和第二电动机18b,第一电动机和第二电动机在图3至图5中由第一电动机和第二电动机的相应的外壳示出,而没有第一电动机和第二电动机的内部部件的细节,这些细节本身是已知的。
[0119]
第一电动机18a和第二电动机18b中的每一个包括旋转轴28。第一电动机18a和第二电动机18b中的每一个的旋转轴28被构造成围绕旋转轴线x旋转,换言之,围绕旋转轴线x旋转。
[0120]
有利地,第一电动机18a和第二电动机18b中的每一个包括围绕旋转轴线x同轴定位的转子和定子(未示出)。此外,第一电动机18a和第二电动机18b中的每一个的转子被联接到或被集成到第一电动机18a和第二电动机18b中的每一个的相应的旋转轴28。
[0121]
在电动驱动设备7的安装构型中,旋转轴线x还是滚轮的旋转轴线。
[0122]
有利地,机电致动器8通过电池(未示出)供应电能,该电池例如可以通过光伏面板、辅助电池或主电力供应网络进行再充电。
[0123]
在变型或附加的情况下,机电致动器8可以由主电力供应网络供应电能。
[0124]
有利地,机电致动器8包括电力供应电缆(未示出),该电力供应电缆使得能够由电池或由主电力供应网络向机电致动器供应电能。
[0125]
有利地,第一电动机18a和第二电动机18b是相同的。
[0126]
因此,获得机电致动器8的成本被优化。
[0127]
有利地,第一电动机18a和第二电动机18b被并联电连接。
[0128]
有利地,第一电动机18a和第二电动机18b是直流型的。
[0129]
机电致动器8包括连接轴16。
[0130]
特别是在机电致动器8的组装构型中,第一电动机18a的旋转轴28经由连接轴16联接到第二电动机18b的旋转轴28。
[0131]
因此,第一电动机18a和第二电动机18b的旋转轴28经由连接轴16机械地连接。
[0132]
有利地,连接轴16是刚性轴。
[0133]
机电致动器8还至少包括第一万向接头30和第二万向接头31。在机电致动器8的组装构型中,第一电动机18a通过第一万向接头30与连接轴16组装。此外,还是在机电致动器8的组装构型中,第二电动机18b通过第二万向接头31与连接轴16组装。
[0134]
因此,第一万向接头30和第二万向接头31确保扭矩经由连接轴16在第一电动机18a和第二电动机18b之间传递,同时容纳第一电动机18a和第二电动机18b的旋转轴28的定位分散部。
[0135]
第一电动机18a和第二电动机18b被配置成由电子控制单元19控制换言之,由电子控制单元19控制。
[0136]
因此,机电致动器8包括单个电子控制单元19,该电子控制单元被配置成控制第一电动机18a和第二电动机18b。
[0137]
以这种方式,获得机电致动器8的成本被优化。
[0138]
特别是在机电致动器8的组装构型中,电子控制单元19沿旋转轴线x布置在第一电动机18a和第二电动机18b之间。
[0139]
因此,电子控制单元19沿旋转轴线x的方向布置在机电致动器8的中心部分中。
[0140]
连接轴16沿旋转轴线x延伸穿过包括电子控制单元19的机电致动器8的区域49。机电致动器8的该区域49沿旋转轴线x限定在第一电动机18a和第二电动机18b之间。
[0141]
如图3和图4所示,机电致动器8还包括第一齿轮箱12a和第二齿轮箱12b。
[0142]
实际上,第一齿轮箱12a和第二齿轮箱12b中的每一个包括至少一个减速级。减速级可以是周转齿轮系。
[0143]
齿轮箱中的每一个的减速级的类型和数量不是限制性的。减速级的数量例如可以是两个或三个。
[0144]
有利地,第一齿轮箱12a和第二齿轮箱12b是相同的。
[0145]
因此,获得机电致动器8的成本被优化。
[0146]
如图2至图4所示,机电致动器8还包括第一输出轴20a和第二输出轴20b。
[0147]
第一电动机18a被机械地连接到第一齿轮箱12a,特别是被间接地机械地连接到第一齿轮箱12a,并且第一齿轮箱12a被机械地连接到第一输出轴20a,特别是沿旋转轴线x的方向被机械地连接到第一输出轴20a。此外,第二电动机18b被机械地连接到第二齿轮箱12b,特别是被间接地机械地连接到第二齿轮箱12b,并且第二齿轮箱12b被机械地连接到第二输出轴20b,特别是沿旋转轴线x的方向被机械地连接到第二输出轴20b。
[0148]
因此,机电致动器8的这种结构使得可以具有大的尺寸和重的重量的百叶窗2能够移动,同时以减小的尺寸容纳在轨道9的内部,从而保证了机电致动器8的可靠操作并且使获得该机电致动器的成本最小化。
[0149]
以这种方式,机电致动器8能够传递大的扭矩,使得可以具有大的尺寸和重的重量的百叶窗2可以移动,同时具有小的空间需求,使得机电致动器可以安装在具有低的高度h和深度p的轨道9中。
[0150]
作为非限制性示例,轨道9的深度p小于或等于40毫米,并且优选地,大约为25毫米。
[0151]
此外,机电致动器8的这种结构使得机电致动器能够安装在不同尺寸的轨道9中,从而使由机电致动器制造商携带的机电致动器产品类型的数量最小化。
[0152]
作为非限制性示例,机电致动器8可以安装在深度p大约为40毫米的轨道9中,或安装在深度p大约为25毫米的轨道9中。
[0153]
此外,机电致动器8的这种结构使得机电致动器能够沿轨道的纵向方向安装在轨道9内的任何位置,也就是说,安装在轨道9的中心位置和轨道9的一个端部附近。
[0154]
有利地,第一输出轴20a和第二输出轴20b是相同的。
[0155]
因此,获得机电致动器8的成本被优化。
[0156]
这里,在遮蔽设备1的组装构型中,第一输出轴20a和第二输出轴20b中的每一个被构造成使滚轮中的一个旋转,换言之,使滚轮中的一个旋转。
[0157]
有利地,机电致动器8包括第一侧8a和第二侧8b。第一侧8a与第二侧8b相对。第一输出轴20a被构造成通向机电致动器8的第一侧8a,换言之,通向机电致动器8的第一侧8a。
此外,第二输出轴20b被构造成通向机电致动器8的第二侧8b,换言之,通向机电致动器8的第二侧8b。
[0158]
有利地,遮蔽设备1还包括第一驱动轴11a和第二驱动轴11b。第一驱动轴11a和第二驱动轴11b是分开的。
[0159]
机电致动器8被构造成经由第一驱动轴11a和第二驱动轴11b驱动百叶窗2移动,换言之,经由第一驱动轴11a和第二驱动轴11b驱动百叶窗2移动。
[0160]
有利地,特别是在遮蔽设备1的组装构型中,机电致动器8被构造成与第一驱动轴11a和第二驱动轴11b联接,换言之,与第一驱动轴11a和第二驱动轴11b联接。
[0161]
因此,第一驱动轴11a和第二驱动轴11b与机电致动器8的联接使得百叶窗2能够移动,尤其是一方面通过使百叶窗2的板条3升高或降低,另一方面通过使百叶窗2的板条3倾斜来使得百叶窗2能够移动。
[0162]
这里,在遮蔽设备1的组装构型中,第一驱动轴11a和第二驱动轴11b沿轨道9的纵向方向在轨道9内延伸。
[0163]
有利地,特别是在遮蔽设备1的组装构型中,第一输出轴20a和第二输出轴20b中的每一个被构造成机械地连接到第一驱动轴11a和第二驱动轴11b中的一个,换言之,被机械地连接到第一驱动轴11a和第二驱动轴11b中的一个。
[0164]
因此,在倾斜器13中的一个处,每个滚轮由与第一输出轴20a或第二输出轴20b联接的第一驱动轴11a和第二驱动轴11b中的一个旋转。
[0165]
有利地,第一输出轴20a和第二输出轴20b中的每一个和第一驱动轴11a或第二驱动轴11b之间的连接通过紧固元件50来实现。
[0166]
这里,紧固元件50是卡入式紧固元件。
[0167]
紧固元件的类型不是限制性的并且可以是不同的,特别是通过螺丝进行紧固。
[0168]
有利地,机电致动器8还包括至少一个制动器10。
[0169]
这里,如图3和图4所示,机电致动器8包括单个制动器10。
[0170]
因此,获得机电致动器8的成本被优化。
[0171]
有利地,制动器10是磁制动器。
[0172]
因此,当机电致动器8静止时,换言之,当机电致动器8未被电致动时,制动器10使得百叶窗2能够保持就位。
[0173]
这里,在机电致动器8的组装构型中,制动器10被布置在第一电动机18a和第一齿轮箱12a之间,也就是说,被布置在第一电动机18a的输出部处,并且被刚性地连接到第一电动机18a和第一齿轮箱12a。
[0174]
因此,第一电动机18a经由制动器10联接到第一齿轮箱12a。
[0175]
有利地,机电致动器8还包括接口元件32。此外,特别是在机电致动器8的组装构型中,接口元件32被布置在第二电动机18b和第二齿轮箱12b之间,也就是说,被布置在第二电动机18b的输出部处,并且被刚性地连接到第二电动机18b和第二齿轮箱12b。
[0176]
因此,第二电动机18b经由接口元件32联接到第二齿轮箱12b。
[0177]
有利地,制动器10和接口元件32特别是在空间需求方面具有类似的外壳。此外,制动器10和接口元件32具有类似的形状,使得制动器和接口元件可以分别与第一电动机18a和第二电动机18b以及第一齿轮箱12a和第二齿轮箱12b组装。
[0178]
有利地,机电致动器8还包括第一壳体17a和第二壳体17b。
[0179]
有利地,第一壳体17a和第二壳体17b是相同的。
[0180]
因此,获得机电致动器8的成本被优化。
[0181]
有利地,第一壳体17a和第二壳体17b中的每一个是管状的。
[0182]
这里,第一壳体17a和第二壳体17b中的每一个具有圆筒形的形状,并且更具体地,具有圆形的横截面。
[0183]
在实施例中,第一壳体17a和第二壳体17b中的每一个至少部分地由金属材料制成。
[0184]
机电致动器的壳体的材料不是限制性的并且可以是不同的。特别地,机电致动器的壳体的材料可以是塑料材料。
[0185]
有利地,在机电致动器8的组装构型中,第一电动机18a、第一齿轮箱12a以及最终的制动器10被布置在第一壳体17a内,换言之,被构造成布置在第一壳体17a内。此外,第二电动机18b、第二齿轮箱12b以及最终的接口元件32被布置在第二壳体17b内,换言之,被构造成布置在第二壳体17b内。
[0186]
有利地,机电致动器8还包括容置部33。
[0187]
有利地,容置部33包括第一端部33a和第二端部33b。第二端部33b与第一端部33a相对。
[0188]
有利地,特别是在机电致动器8的组装构型中,容置部33沿旋转轴线x布置在第一壳体17a和第二壳体17b之间,换言之,被构造成沿旋转轴线x布置在第一壳体17a和第二壳体17b之间,并且容置部33与第一壳体17a和第二壳体17b中的每一个成一体,换言之,被构造成与第一壳体17a和第二壳体17b中的每一个成一体。
[0189]
因此,第一壳体17a被布置在容置部33的第一端部33a处,第二壳体17b被布置在容置部33的第二端部33b处。
[0190]
以这种方式,容置部33形成第三壳体。
[0191]
实际上,机电致动器8的区域49围绕旋转轴线x被径向地限定在容置部33的内部。
[0192]
有利地,第一壳体17a和第二壳体17b和容置部33一起形成用于机电致动器8的保护围封件。
[0193]
有利地,容置部33由塑料材料制成。
[0194]
有利地,容置部33被附接到第一壳体17a和第二壳体17b。
[0195]
这里,容置部33通过互锁(特别是通过将容置部33的第一部分33c插入到第一壳体17a中直到容置部33的第一肩部34a附近,以及通过将容置部33的第二部分33d插入到第二壳体17b中直到容置部33的第二肩部34b附近)而附接到第一壳体17a和第二壳体17b。
[0196]
容置部到第一壳体和第二壳体的紧固类型不是限制性的并且可以是不同的。特别地,容置部到第一壳体和第二壳体的紧固类型可以是通过螺丝或弹性卡入式紧固元件进行紧固。
[0197]
有利地,在机电致动器8的组装构型中,第一电动机18a、第一齿轮箱12a以及最终的制动器10沿旋转轴线x从容置部33的第一端部33a起布置在容置部33的延伸部中,换言之,被构造成沿旋转轴线x从容置部33的第一端部33a起布置在容置部33的延伸部中。此外,第二电动机18b、第二齿轮箱12b以及最终的接口元件32沿旋转轴线x从容置部33的第二端
部33b起布置在容置部33的延伸部中,换言之,被构造成沿旋转轴线x从容置部33的第二端部33b起布置在容置部33的延伸部中。
[0198]
有利地,在机电致动器8的组装构型中,第一壳体17a、第一电动机18a、第一齿轮箱12a以及最终的制动器10形成第一子组件35。此外,第二壳体17b、第二电动机18b、第二齿轮箱12b以及最终的接口元件32形成第二子组件36。
[0199]
这里,如图3所示,特别是在机电致动器8的组装构型中,电子控制单元19被布置在容置部33的内部,换言之,被集成在容置部33的内部。
[0200]
因此,电子控制单元19被布置在第一壳体17a和第二壳体17b之间,特别是被布置在第一子组件35和第二子组件36之间。
[0201]
这里,容置部33包括两个半壳38a、38b。
[0202]
有利地,特别是在机电致动器8的组装构型中,两个半壳38a、38b彼此组装,换言之,被构造成彼此组装。
[0203]
因此,两个半壳38a、38b彼此刚性地连接。
[0204]
有利地,两个半壳38a、38b通过紧固元件40接合在一起。
[0205]
这里,两个半壳38a、38b的紧固元件40是弹性卡入式紧固元件,特别是每个半壳38a、38b的数量是四个。
[0206]
用于两个半壳的紧固元件的数量和类型不是限制性的并且可以是不同的。紧固元件例如可以是螺丝紧固元件,并且紧固元件的数量可以是两个或更多个。
[0207]
有利地,容置部33是管状的。
[0208]
这里,容置部33具有大致圆筒形的形状,并且更具体地,具有圆形的横截面。
[0209]
有利地,机电致动器8还可以包括切换设备41。
[0210]
在具有板条的卷帘的情况下,高位置(特别是安全位置或上行程端部位置)对应于百叶窗2的被压靠在切换设备41的元件上的第一板条3。
[0211]
在家庭自动化设施100中的遮蔽设备1的组装构型中,百叶窗2的第一板条3对应于百叶窗2的上板条3。
[0212]
特别地,切换设备41可以用于确定百叶窗2何时已经到达该百叶窗的上位置。
[0213]
有利地,切换设备41被布置在容置部33中,换言之,被集成到容置部33中。
[0214]
有利地,切换设备41包括第一构件42和第二构件43。此外,在机电致动器8的组装构型中,第一构件42被刚性地连接到容置部33。第二构件43可以相对于第一构件42移动,特别是在平移移动d中相对于第一构件42移动。
[0215]
有利地,第一构件42和第二构件43形成切换设备41的子组件44。切换设备41的子组件44位于容置部33的外部。切换设备41的这种子组件44通常被称为“蘑菇部”。
[0216]
实际上,特别是在遮蔽设备1的组装构型中,当百叶窗2到达升高位置时,第二构件43通过百叶窗2的第一板条3相对于第一构件42移位,换言之,被构造成通过百叶窗2的第一板条3相对于第一构件42移位。
[0217]
因此,当机电致动器8被致动时,第二构件43相对于第一构件42沿使第二构件43更靠近容置部33的方向的移位是由于百叶窗2的第一板条3朝向上位置的移位引起的。百叶窗2的第一板条3的移位通过对机电致动器8进行致动并且使驱动绳5围绕滚轮进行卷绕来实现。
[0218]
第二构件43通过百叶窗2的第一板条3相对于第一构件42的这种移位对应于到达百叶窗2的上位置。
[0219]
以这种方式,当检测到第二构件43的这种移位时,电子控制单元19命令第一电动机18a和第二电动机18b停止。
[0220]
有利地,第二构件43在被称为静止位置的第一位置和被称为百叶窗2的位置检测位置的第二位置之间移位,换言之,被构造成在被称为静止位置的第一位置和被称为百叶窗2的位置检测位置的第二位置之间移位,在第一位置,在第二构件43与百叶窗2的第一板条3之间没有接触,在第二位置,百叶窗2的第一板条3与第二构件43接触。
[0221]
有利地,电子控制单元19包括至少一个开关45(特别是机电类型的开关)和至少一个印刷电路板46。
[0222]
实际上,开关45被用于检测卷帘1的百叶窗2的上位置。
[0223]
这里,电子控制单元19包括单个开关45,单个开关用于检测遮蔽设备1的百叶窗2的上位置。
[0224]
有利地,电子控制单元19包括两个印刷电路板46。此外,两个印刷电路板46在容置部33的内部平行地布置并且彼此叠置。
[0225]
因此,这减少了电子控制单元19沿旋转轴线x的方向的空间需求,换言之,沿轨道9的纵向方向的空间需求。
[0226]
以这种方式,减小了机电致动器8的在遮蔽设备1的组装构型中平行于旋转轴线x的长度l,以便于将机电致动器安装在轨道9中,而不管机电致动器在轨道9内的位置,特别是不管机电致动器沿轨道的纵向方向在轨道9的一个端部处或在轨道9的中心部分中。
[0227]
有利地,开关45通过电导体电连接到印刷电路板46中的一个。此外,开关45被组装在印刷电路板46中的一个上,换言之,被配置成组装在印刷电路板46中的一个上。
[0228]
有利地,根据第二构件43相对于第一构件42的位置,开关45通过设置在壳体33中的开口47经由第二构件43致动,换言之,被构造成通过设置在容置部33中的开口47经由第二构件43致动容置部。
[0229]
有利地,电子控制单元19包括微控制器29。在机电致动器8的组装构型中,微控制器29被组装在印刷电路板46中的一个上。此外,微控制器29包括存储器(未示出)。
[0230]
有利地,特别是在机电致动器8的组装构型中,连接轴16沿旋转轴线x延伸穿过容置部33,换言之,被构造成沿旋转轴线x延伸穿过容置部33。
[0231]
这里,如图4所示,连接轴16在电子控制单元19的两个印刷电路板46之间延伸,换言之,被构造成在电子控制单元19的两个印刷电路板46之间延伸,连接轴本身容纳在容置部33内。
[0232]
有利地,机电致动器8还包括计数设备37,该计数设备还可被称为行程端部和/或障碍物检测设备。
[0233]
这里,如图4和图5所示,计数设备37是磁性类型的,并且围绕连接轴16布置在机电致动器8的内部,并且更具体地,布置在容置部33的内部。
[0234]
有利地,计数设备37包括磁轮39和至少一个霍尔效应传感器48。此外,磁轮39被安装在连接轴16上,并且更具体地,被安装在第二万向接头31处,换言之,被构造成安装在连接轴16上,并且更具体地,被构造成安装在第二万向接头31处,该第二万向接头将连接轴16
连接到第二电动机18b的旋转轴28。
[0235]
计数设备的类型不是限制性的并且可以是不同的。特别地,计数设备可包括磁环,该磁环被配置成形成多个位置检测传感器,以代替一个或多个霍尔效应传感器。
[0236]
上行程端部位置(特别是操作位置)对应于预定的上行程端部位置,特别是通过计数设备37对应于预定的上行程端部位置。
[0237]
此外,下行程端部位置对应于预定的下行程端部位置,特别是通过计数设备37对应于预定的下行程端部位置,或对应于负荷杆4支承抵靠建筑物的开口的边界,或对应于百叶窗2的完全展开。
[0238]
由于本发明,机电致动器的结构使得遮蔽设备的具有大的尺寸和重的重量的百叶窗能够移动,同时以减小的尺寸容纳在遮蔽设备的轨道的内部,从而保证了机电致动器的可靠操作并且使获得该机电致动器的成本最小化。
[0239]
此外,机电致动器的这种结构可以由机电致动器的制造商利用在其他机电致动器中使用的部件来实施,部件例如第一电动机和第二电动机、第一齿轮箱和第二齿轮箱、制动器、第一输出轴和第二输出轴、第一壳体和第二壳体、电子控制单元以及切换设备,从而使获得不同产品类型的机电致动器的成本最小化,并且特别是在由每种机电致动器产品类型所传递的扭矩方面提供尽可能广泛的机电致动器。
[0240]
此外,在其他机电致动器上使用的部件的重复使用以获得根据本发明的机电致动器使得能够重复使用与其他机电致动器的配件相同的配件,该配件用于轨道中组装、安装和操作各种机电致动器,并且因此,对于机电致动器的制造商和安装者而言简化了配件产品类型的管理。
[0241]
当然,在不脱离由权利要求限定的本发明的范围的情况下,可以对上述实施例进行许多修改。
[0242]
在变型中,第一电动机18a和第二电动机18b被串联电连接。
[0243]
在变型中,第一电动机18a和第二电动机18b可以是异步的或电子换向的无刷电动机,也被称为“无刷直流”(brushless direct current,bldc)或“永磁同步”电动机。
[0244]
在未示出的变型中,第一壳体17a和第二壳体17b中的每一个具有平行六面体的形状。此外,容置部33具有平行六面体的形状。
[0245]
在未示出的变型中,容置部33可以由单件制成。在这种情况下,容置部33具有贯通开口,使得连接轴16、电子控制单元19和计数设备37可以插入到容置部33中。容置部33的一个或多个通道开口被布置在容置部33的第一端部33a或第二端部33b处。
[0246]
在未示出的变型中,在机电致动器8的组装构型中,制动器10被布置在容置部33和第一电动机18a之间,换言之,被布置在第一电动机18a的输入部处,被布置在第一齿轮箱12a和第一输出轴20a之间,换言之,被布置在第一齿轮箱12a的输出部处,或被布置在第一齿轮箱12a的两个减速级之间。此外,还是在未示出的变型中,接口元件32被布置在容置部33和第二电动机18b之间,换言之,被布置在第二电动机18b的输入部处,被布置在第二齿轮箱12b和第二输出轴20b之间,换言之,被布置在第二齿轮箱12b的输出部处,或被布置在第二齿轮箱12b的两个减速级之间。
[0247]
在未示出的变型中,制动器10可以是弹簧制动器、凸轮制动器或电磁制动器。
[0248]
在未示出的变型中,计数设备37可以被布置在机电致动器8的第一电动机18a和第
二电动机18b中的一个的旋转轴28(特别是转子)上或第一输出轴20a和第二输出轴20b中的一个上,而不是被布置在连接轴16上。计数设备还可以是光学的,而不是磁性的。
[0249]
在未示出的变型中,计数设备37(在这种情况下为行程端部和/或障碍物检测设备)通过经由电子控制单元19(特别是微控制器29)在第一电动机18a和第二电动机18b中的一个或两个处的扭矩检测来实施,以及通过用于测量流过第一电动机18a和第二电动机18b中的一个或两个的电流的设备,特别是通过分流电阻器来实施。因此,行程端部和/或障碍物检测设备是电子类型的,并且使得能够检测上行程端部位置和下行程端部位置的到达,以及当百叶窗2移位时检测障碍物。
[0250]
在未示出的变型中,计数设备37(在这种情况下为行程端部和/或障碍物检测设备)经由电子控制单元19(特别是微控制器29),并且更具体地,经由微控制器的时钟以时间方式来实施。
[0251]
在未示出的变型中,机电致动器8的壳体由一个部件制成,换言之,是单件式的,以代替第一壳体17a和第二壳体17b。在这种情况下,容置部33被容纳在机电致动器8的壳体的内部。此外,切换设备41被直接组装在机电致动器8的壳体上。
[0252]
在未示出的变型中,机电致动器8包括第一制动器10和第二制动器10。在这种情况下,第二制动器10代替被布置在第二电动机18b和第二齿轮箱12b之间的接口元件32。有利地,第一制动器和第二制动器10是相同的。因此,获得机电致动器8的成本被优化。此外,机电致动器8的由第一壳体17a、第一电动机18a、第一齿轮箱12a和第一制动器10形成的第一子组件35可以与机电致动器8的由第二壳体17b、第二电动机18b、第二齿轮箱12b和第二制动器10形成的第二子组件36相同。有利地,第一制动器10被布置在第一电动机18a和第一齿轮箱12a之间,换言之,被构造成布置在第一电动机18a和第一齿轮箱12a之间,并且被刚性地连接到第一电动机18a和第一齿轮箱12a,换言之,被构造成刚性地连接到第一电动机18a和第一齿轮箱12a。此外,第二制动器10被布置在第二电动机18b和第二齿轮箱12b之间,换言之,被构造成布置在第二电动机18b和第二齿轮箱12b之间,并且被刚性地连接到第二电动机18b和第二齿轮箱12b,换言之,被构造成刚性地连接到第二电动机18b和第二齿轮箱12b。
[0253]
在未示出的另一个实施例中,驱动设备7包括多个驱动绳5和多个定向绳6,滚轮与倾斜器分开。在这种情况下,驱动绳5一方面连接到负荷杆4,另一方面连接到滚轮。定向绳6被连接到负荷杆4、板条3以及倾斜器。实际上,在遮蔽设备1的组装构型中,每个驱动绳5的下端部被连接到负荷杆4,每个驱动绳5的上端部被连接到滚轮中的一个。在遮蔽设备1的组装构型中,每个定向绳6的下端部被连接到负荷杆4,每个定向绳6的上端部被连接到倾斜器中的一个。优选地,滚轮和倾斜器被布置在轨道9的内部。
[0254]
在未示出的另一个实施例中,驱动设备7包括用于使百叶窗2的板条3驱动和定向的两个链条,以代替驱动绳5和定向绳6。在这种情况下,每个链条被布置在滑动件内,该滑动件沿遮蔽设备1的百叶窗2的一侧布置。
[0255]
此外,在不脱离由权利要求限定的本发明的范围的情况下,可以组合所设想的实施例和变型以产生本发明的新实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。