1.本技术涉及工业组装领域,尤其涉及一种工业组装方法及工业组装系统。
背景技术:
2.在对手机的相机进行组装的过程中,存在因灰尘进入而导致的约为2.5%的相机不良率,进入的灰尘包括无法直接由肉眼观察的环境灰尘、机械作业灰尘、人工操作灰尘等。在工厂内架设大型无尘室的成本高昂,且机械手臂与人员皆为大型污染源,如何缩小无尘室的空间降低污染进而降低成本,是工业组装领域面临的一个问题。
技术实现要素:
3.鉴于以上内容,有必要提供一种工业组装方法及工业组装系统,能够缩小无尘室的空间,降低机械手臂和人员对相机的污染,进而降低成本。
4.所述工业组装系统包括:机械手臂、组装设备及超净工作台,所述组装设备设置于所述超净工作台;所述超净工作台包括第一开口,所述第一开口用于作为所述机械手臂的远程运动中心;所述机械手臂用于将摄像头模块移送至所述组装设备,所述组装设备用于对所述摄像头模块和手机模块进行组装。
5.可选地,所述系统还包括检测设备,所述检测设备设置于所述超净工作台;在所述机械手臂将所述摄像机模块移送至所述组装设备之前,所述机械手臂还用于将所述摄像头模块移送至所述检测设备;所述检测设备用于对所述摄像头模块进行检测,获得检测结果。
6.可选地,所述系统还包括除尘设备,所述除尘设备设置于所述超净工作台;当所述检测结果指示所述摄像头模块有灰尘时,所述机械手臂将所述摄像头模块移送至所述除尘设备;所述除尘设备用于对所述摄像头模块进行除尘;当所述检测结果指示所述摄像头模块无灰尘时,所述机械手臂将所述摄像头模块移送至所述组装设备。
7.可选地,所述超净工作台还包括第二开口,所述第二开口用于作为所述手机模块的进入口和移出口。
8.可选地,所述机械手臂包括依次连接的主体部、第一连杆、第二连杆、第一夹具;其中,所述第一连杆通过扣环组件与所述第二连杆连接;所述第一夹具用于夹持所述摄像头模块;所述机械手臂通过所述扣环组件调整所述第一连杆与所述第二连杆之间的连接长度和连接角度,使得所述第二连杆带动所述第一夹具将所述摄像头模块从所述第一开口移入所述超净工作台,或者从所述第一开口移出所述摄像头模块。
9.可选地,所述机械手臂还包括刀尖点模型,所述刀尖点模型用于设定并校正所述机械手臂的刀尖点,获得目标刀尖点;所述目标刀尖点包括:所述检测设备所在的第一位置、所述除尘设备所在的第二位置、所述组装设备所在的第三位置;所述系统还包括远程运动中心模型,所述远程运动中心模型用于计算所述机械手臂的移动路径,所述移动路径包括:所述第一夹具进入所述超净工作台并移动至所述第一位置的第一移动路径、所述第一夹具从所述第一位置移动至所述第二位置的第二移动路径、所述第一夹具从所述第二位置
移动至所述第一位置的第三移动路径、所述第一夹具从所述第一位置移动至所述第三位置的第四移动路径;所述移动路径还包括:所述第一夹具从所述第一位置移出所述超净工作台的第一退出路径、所述第一夹具从所述第三位置移出所述超净工作台的第二退出路径。
10.可选地,所述摄像头模块包括保护膜;所述检测设备包括第二夹具及显微摄影设备,所述第二夹具用于撕取所述保护膜,所述显微摄影设备用于观测并获取被撕取保护膜后的所述摄像头模块的图像;所述系统还包括图像检测模型,所述图像检测模型用于检测所述图像,获得所述检测结果;所述组装设备包括组装治具及托盘,所述组装治具用于对无灰尘的摄像头模块和手机模块进行组装,获得组装后的手机模块;所述托盘用于承载所述手机模块或所述组装后的手机模块。
11.所述工业组装方法,利用所述工业组装系统,包括:将超净工作台的第一开口设定为机械手臂的远程运动中心,依据所述远程运动中心获得所述机械手臂的组装参数;根据所述组装参数校准所述机械手臂;控制所述机械手臂将摄像头模块移送至位于所述超净工作台的组装设备,利用所述组装设备对所述摄像头模块和手机模块进行组装。
12.可选地,在所述机械手臂将所述摄像机模块移送至所述组装设备之前,所述方法还包括:控制所述机械手臂夹取摄像头模块,计算所述机械手臂的第一移动路径,控制所述机械手臂依据所述第一移动路径将所述摄像头模块移送至位于所述超净工作台的检测设备;利用所述检测设备检测所述摄像头模块,获得检测结果,所述检测结果包括第一次检测结果和第二次检测结果。
13.可选地,当所述第一次检测结果指示所述摄像头模块有灰尘时,计算所述机械手臂的第二移动路径,控制所述机械手臂,依据所述第二移动路径将所述摄像头模块移送至位于所述超净工作台的除尘设备,利用所述除尘设备对所述摄像头模块进行除尘;计算所述机械手臂的第三移动路径,控制所述机械手臂,依据所述第三移动路径将除尘后的所述摄像头模块移送至所述检测设备,利用所述检测设备对所述除尘后的摄像头模块进行检测,获得所述第二次检测结果;当所述第一次检测结果或所述第二次检测结果指示所述摄像头模块无灰尘时,计算所述机械手臂的第四移动路径,控制所述机械手臂,依据所述第四移动路径将所述摄像头模块移送至位于所述超净工作台的组装设备。
14.可选地,所述方法还包括:设定并校正所述机械手臂的刀尖点,获得目标刀尖点;所述目标刀尖点包括:所述检测设备所在的第一位置、所述除尘设备所在的第二位置、所述组装设备所在的第三位置。
15.可选地,所述计算所述机械手臂的第一移动路径包括:根据所述检测设备所在的第一位置计算所述第一移动路径,所述第一移动路径包括所述第一夹具通过所述第一开口进入所述超净工作台,移动至所述第一位置的移动路径;所述计算所述机械手臂的第二移动路径包括:根据所述检测设备所在的第一位置和所述除尘设备所在的第二位置计算所述第二移动路径,所述第二移动路径包括所述第一夹具从所述第一位置移动至所述第二位置的移动路径;所述计算所述机械手臂的第三移动路径包括:根据所述除尘设备所在的第二位置和所述检测设备所在的第一位置计算所述第三移动路径,所述第三移动路径包括所述第一夹具从所述第二位置移动至所述第一位置的移动路径;所述计算所述机械手臂的第四移动路径包括:根据所述检测设备所在的第一位置和所述组装设备所在的第三位置计算所述第四移动路径,所述第四移动路径包括所述第一夹具从所述第一位置移动至所述第三位
置的移动路径。
16.可选地,所述方法还包括:计算所述第一夹具从所述第一位置,通过所述第一开口移出所述超净工作台的第一退出路径;及计算所述第一夹具从所述第三位置,通过所述第一开口移出所述超净工作台的第二退出路径。
17.可选地,所述方法还包括:当所述第二次检测结果指示所述摄像头模块有灰尘时,控制所述机械手臂,依据所述第一退出路径将所述摄像头模块移出所述超净工作台;及当对所述摄像头模块和手机模块进行组装后,控制所述机械手臂依据所述第二退出路径移出所述超净工作台。
18.相较于现有技术,所述工业组装方法及工业组装系统,能够使用超净工作台缩小组装相机所需的无尘室的空间,利用远程运动中心算法辅助机械手臂自主操作,降低机械手臂和人员对相机的污染,进而降低成本;还能辅助对相机进行灰尘检测和除尘。
附图说明
19.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
20.图1是本技术实施例提供的工业组装系统的部分架构图。
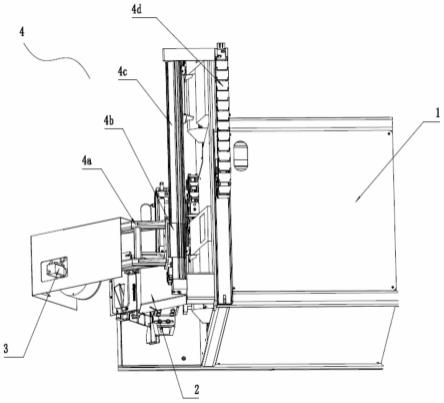
21.图2是本技术实施例提供的工业组装系统的整体架构图。
22.图3是本技术实施例提供的工业组装系统的部分设备环境图。
23.图4是本技术实施例提供的机械手臂部分的示例图。
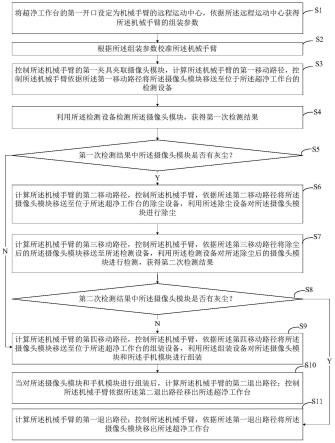
24.图5是本技术实施例提供的工业组装方法的流程图。
25.主要元件符号说明
26.27.[0028][0029]
如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
[0030]
为了能够更清楚地理解本技术的上述目的、特征和优点,下面结合附图和具体实施例对本技术进行详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
[0031]
在下面的描述中阐述了很多具体细节以便于充分理解本技术,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0032]
除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
[0033]
参阅图1所示,为本技术较佳实施例的工业组装系统的部分架构图。图2所示,为本技术较佳实施例的工业组装系统的整体架构图。图3是本技术较佳实施例的工业组装系统的设备环境图。以下结合图1至图3对实现所述工业组装方法的所述工业组装系统和具体说明。
[0034]
在一个实施例中,所述工业组装方法应用于所述工业组装系统1中,如图1所示,所述工业组装系统1包括机械手臂3、组装设备7及超净工作台10,所述组装设备7设置于所述超净工作台10。如图2和图3所示,所述工业组装系统1还包括:检测设备5、除尘设备6、计算机装置4、通信模块8;所述检测设备5和除尘设备6设置于所述超净工作台10中。所述通信模块可以是wi-fi模块,用于通信连接所述计算机装置4、所述机械手臂3,以及所述超净工作台10中的所述检测设备5、所述除尘设备6,及所述组装设备7。
[0035]
在一个实施例中,如图3所示,所述超净工作台10设置于第一平台p1上,所述第一平台p1可以是底部安装有万向轮w的可移动平台,所述第一平台p1对接手机模块ph的生产流水线(如图3所示手机流水线ph1),所述第一平台p1的内部安装有升降移送设备h;所述超净工作台10包括第一开口101、第二开口102,所述第一开口101用于作为所述机械手臂3的远程运动中心(remote center motion,rcm);所述计算机装置4包括控制模型44,所述控制模型44用于控制所述第一平台p1的升降移送设备h与所述第二开口102对接,将所述手机模块ph从所述第二开口102移送至所述超净工作台10的所述组装设备7处,或者从所述组装设备7处通过所述第二开口102从所述超净工作台10移出所述手机模块ph。需要说明的是,所述第一开口101可以是较小(例如,直径为2cm)的圆形开口,所述手机模块ph可以是未安装摄像头模块c的成品或半成品。
[0036]
在一个实施例中,如图3所示,所述机械手臂3设置于第二平台p2上,所述第二平台p2可以是底部安装有万向轮w的可移动平台,所述第二平台p2可以与所述第一平台p1等高;如图3和图4所示,所述机械手臂3包括依次连接的主体部30、第一连杆32、第二连杆33、第一夹具34;其中,所述第一连杆32通过扣环组件35与所述第二连杆33连接。
[0037]
在一个实施例中,所述第一连杆32和所述第二连杆33可以是材质、长度相同的合
金圆杆,其直径小于所述第一开口101的直径。例如图4所示,所述第一连杆32连接于所述主体部30的法兰面中心且垂直于所述法兰面。所述扣环组件35包括第一扣环k1及第二扣环k2,所述第一连杆32穿设于所述第一扣环k1,所述第二连杆33穿设于所述第二扣环k2,由此实现所述第一连杆32和第二连杆33之间的连接,其中,所述第一扣环k1用于穿设于所述第一连杆32的任一位置处;所述第二扣环k2用于与所述第一扣环k1合扣,还用于穿设于所述第二连杆33的任一位置处;所述第二连杆33可以通过用户的操作,以所述第一连杆32为轴在平面zoy内作360度转动;所述第二连杆还可以通过用户的操作,以所述第一扣环k1与所述第二扣环k2的合扣点为中心,在所述第一连杆32和所述第二连杆33所在的平面xoy内作360度转动;由此可以得知,可以根据用户需求,通过所述扣环组件35随意调整所述第一连杆32和所述第二连杆33的连接长度和连接角度。需要说明的是,在实际操作中,所述第一连杆32和所述第二连杆33之间的连接角度(如图4中在平面xoy内的角度)阈值范围为[-75度,75度]。
[0038]
在一个实施例中,所述机械手臂3的主体部30可以由多个连接体(如图4中所示的三个连接体l)组成,通过所述多个连接体的配合做任意角度的运动;所述主体部30包括处理器300、存储器301,所述存储器301中安装有刀尖点模型31,所述刀尖点模型31用于设定并校正所述第一夹具34的刀尖点(tool center point,tcp),获得目标刀尖点;所述目标刀尖点包括:所述检测设备5所在的第一位置、所述除尘设备6所在的第二位置、所述组装设备7所在的第三位置。
[0039]
在一个实施例中,如图2所示,所述计算机装置4包括远程运动中心模型42,所述远程运动中心模型42用于仿真模拟所述工业组装系统1,将所述第一开口101设置为所述机械手臂3的远程运动中心,模拟并计算所述机械手臂3的所述第二连杆33和所述第一夹具34通过所述第一开口101进入所述超净工作台10的移动范围阈值,以及所述机械手臂3的组装参数,所述组装参数包括所述第一连杆32和所述第二连杆33的连接长度和连接角度。按照计算得到的连接长度和连接角度,利用所述扣环组件35连接所述第一连杆32和所述第二连杆33;所述主体部30通过所述第一连杆32带动所述第二连杆33和所述第一夹具34,使得所述第二连杆33和所述第一夹具34通过所述第一开口101进入所述超净工作台10,在计算得到的移动范围阈值内做移动;在所述移动范围阈值内所述第二连杆33和所述第一夹具34的移动,不会碰撞到所述第一开口101。需要说明的是,所述第二连杆33和所述第一夹具34在移出所述超净工作台10后的移动范围,不受所述移动范围阈值的限制。
[0040]
在一个实施例中,所述第一夹具34可以内置芯片,响应所述机械手臂3的夹取指令对摄像头模块c进行夹取,或者响应所述机械手臂3的放置指令对所述摄像头模块c进行放置,其大小满足夹持所述摄像头模块c时也能通过所述第一开口101。所述摄像头模块c包括保护膜。
[0041]
在一个实施例中,所述控制模型44用于控制所述机械手臂3下达夹取指令,所述第一夹具34用于响应所述夹取指令,夹持放置在所述超净工作台10之外的物料区g的所述摄像头模块c;所述远程运动中心模型42用于根据所述检测设备5所在的第一位置计算第一移动路径,所述第一移动路径包括所述第一夹具34通过所述第一开口101进入所述超净工作台10,移动至所述第一位置的移动路径;所述控制模型44用于控制所述机械手臂3,依据所述第一移动路径将所述摄像头模块c移送至位于所述超净工作台10的检测设备5的第一位
置处。
[0042]
在一个实施例中,所述检测设备5包括第二夹具51、显微摄影设备52、第三开口531、供光设备532。在一个实施例中,所述检测设备5的第一位置可以是指所述第三开口531所在的位置;所述第二夹具51可以内置芯片,用于响应所述计算机装置4的撕取指令,对所述第一夹具34夹持的摄像头模块c的保护膜进行撕取;所述供光设备532用于为所述显微摄影设备52提供光源;所述显微摄影设备52包括显微功能与摄影功能,用于通过所述第三开口531观测并获取被撕取保护膜后的所述摄像头模块c的图像;所述计算机装置4还包括图像检测模型43,所述图像检测模型43用于获取所述摄像头模块c的图像,获得第一次检测结果,所述第一次检测结果包括:所述摄像头模块c有灰尘和所述摄像头模块c无灰尘。
[0043]
在一个实施例中,当所述第一次检测结果指示所述摄像头模块c有灰尘时,所述远程运动中心模型42用于计算所述机械手臂3的第二移动路径,包括:根据所述检测设备5所在的第一位置和所述除尘设备6所在的第二位置计算所述第二移动路径,所述第二移动路径包括所述第一夹具34从所述第一位置移动至所述第二位置的移动路径;所述控制模型44用于控制所述机械手臂3,依据所述第二移动路径将所述摄像头模块c移送至位于所述超净工作台10的除尘设备6。
[0044]
在一个实施例中,所述除尘设备6包括抽气设备60和吹气设备61,用于响应所述计算机装置4的除尘指令对所述摄像头模块c进行预设时间(例如,30秒)的除尘。具体地,所述吹气设备61可以将所述摄像头模块c上的部分灰尘或全部灰尘吹落。所述抽气设备60用于将灰尘从所述摄像头模块c抽离。需要说明的是,为保证所述超净工作台10中的无尘环境,吹落的灰尘也会由所述抽气设备60抽离所述超净工作台10。
[0045]
在一个实施例中,当除尘结束后,所述远程运动中心模型42用于计算所述机械手臂3的第三移动路径,包括:根据所述除尘设备6所在的第二位置和所述检测设备5所在的第一位置计算所述第三移动路径,所述第三移动路径包括所述第一夹具34从所述第二位置移动至所述第一位置的移动路径;所述控制模型44用于控制所述机械手臂3,依据所述第三移动路径将除尘后的所述摄像头模块c移送至所述检测设备5,所述检测设备5用于对所述除尘后的摄像头模块c进行检测,获得第二次检测结果,所述第二次检测结果包括:所述摄像头模块c有灰尘和所述摄像头模块c无灰尘。需要说明的是,所述检测设备5获得所述第二次检测结果的过程,除无需撕取保护膜外,与前述获得所述第一次检测结果的过程相同,不再赘述。
[0046]
在一个实施例中,当所述第一次检测结果或第二次检测结果指示所述摄像头模块c无灰尘时,所述远程运动中心模型42用于计算所述机械手臂3的第四移动路径,包括:根据所述检测设备5所在的第一位置和所述组装设备7所在的第三位置计算所述第四移动路径,所述第四移动路径包括所述第一夹具34从所述第一位置移动至所述第三位置的移动路径;所述控制模型44用于控制所述机械手臂3,依据所述第四移动路径将所述摄像头模块c移送至位于所述超净工作台10的组装设备7。
[0047]
在一个实施例中,所述组装设备7包括组装治具70、托盘71,所述组装设备7设置于所述超净工作台10的所述第二开口102处;所述组装治具70可以是工艺装配类治具,用于对所述摄像头模块c和所述手机模块ph进行组装;所述托盘71用于与所述第一平台p1的升降移送设备h对接,承载所述手机模块ph。
[0048]
在一个实施例中,当所述第二次检测结果指示所述摄像头模块c有灰尘时,所述远程运动中心模型42用于计算所述第一夹具34从所述检测设备5所在的所述第一位置,通过所述第一开口101移出所述超净工作台10的第一退出路径;所述控制模型44还用于控制所述机械手臂3,依据所述第一退出路径将所述摄像头模块c移出所述超净工作台10,到达预设的摄像头模块c回收区r;所述控制模型44控制所述机械手臂3下达放置指令,所述第一夹具34用于响应所述放置指令,将所述摄像头模块c放置在所述回收区r。需要说明的是,之后所述工业组装系统1会利用所述机械手臂3,夹取所述物料区g的其他摄像机模块进行下一次所述工业组装方法。
[0049]
在一个实施例中,当对所述摄像头模块c和手机模块ph进行组装后,所述远程运动中心模型42用于计算所述第一夹具34从所述组装设备7所在的第三位置,通过所述第一开口101移出所述超净工作台的第二退出路径;所述控制模型44还用于控制所述机械手臂3依据所述第二退出路径移出所述超净工作台10。
[0050]
在一些实施例中,所述存储器41、存储器301用于存储程序代码和各种数据。例如图2所示,所述存储器41可以存储安装在所述计算机装置4中的远程运动中心模型42、图像检测模型43、控制模型44等,还可以用于在计算机装置4的运行过程中,实现高速、自动地完成程序或数据的存取。所述存储器41包括只读存储器(read-only memory,rom)、可编程只读存储器(programmable read-only memory,prom)、可擦除可编程只读存储器(erasable programmable read-only memory,eprom)、一次可编程只读存储器(one-time programmable read-only memory,otprom)、电子擦除式可复写只读存储器(electrically-erasable programmable read-only memory,eeprom)、只读光盘(compact disc read-only memory,cd-rom)或其他光盘存储器、磁盘存储器、磁带存储器、或者任何其他能够用于携带或存储数据的计算机可读的存储介质。所述存储器301可以存储安装在所述主体部30中的刀尖点模型31等,还可以用于在主体部30的运行过程中,实现高速、自动地完成程序或数据的存取;所述主体部30包括只读存储器(read-only memory,rom)、可编程只读存储器(programmable read-only memory,prom)、可擦除可编程只读存储器(erasable programmable read-only memory,eprom)、一次可编程只读存储器(one-time programmable read-only memory,otprom)、电子擦除式可复写只读存储器(electrically-erasable programmable read-only memory,eeprom)、只读光盘(compact disc read-only memory,cd-rom)或其他光盘存储器、磁盘存储器、磁带存储器、或者任何其他能够用于携带或存储数据的计算机可读的存储介质。
[0051]
尽管未示出,所述计算机装置4还可以包括给各个部件供电的电源(比如电池),优选的,电源可以通过电源管理装置与所述至少一个处理器40逻辑相连,从而通过电源管理装置实现管理充电、放电、以及功耗管理等功能;所述主体部30还可以包括给各个部件供电的电源(比如电池),优选的,电源可以通过电源管理装置与所述至少一个处理器300逻辑相连,从而通过电源管理装置实现管理充电、放电、以及功耗管理等功能。电源还可以包括一个或一个以上的直流或交流电源、再充电装置、电源故障检测电路、电源转换器或者逆变器、电源状态指示器等任意组件。所述计算机装置4和所述主体部30还可以包括多种传感器、蓝牙模块、wi-fi模块等,在此不再赘述。
[0052]
在一些实施例中,所述至少一个处理器40可以分别由集成电路组成,例如可以分
别由单个封装的集成电路所组成,也可以是分别由多个相同功能或不同功能封装的集成电路所组成,包括一个或者多个中央处理器(central processing unit,cpu)、微处理器、数字处理芯片、图形处理器及各种控制芯片的组合等。所述至少一个处理器40是所述计算机装置4的控制核心(control unit),利用各种接口和线路连接整个计算机装置4的各个部件,通过运行或执行存储在所述存储器41内的程序或者模块,以及调用存储在所述存储器41内的数据,以执行计算机装置4的各种功能和处理数据,例如执行图5所示的无尘工业组装的功能。所述至少一个处理器300可以分别由集成电路组成,例如可以分别由单个封装的集成电路所组成,也可以是分别由多个相同功能或不同功能封装的集成电路所组成,包括一个或者多个中央处理器(central processing unit,cpu)、微处理器、数字处理芯片、图形处理器及各种控制芯片的组合等。所述至少一个处理器300是所述主体部30的控制核心(control unit),利用各种接口和线路连接整个主体部30的各个部件,通过运行或执行存储在所述存储器301内的程序或者模块,以及调用存储在所述存储器301内的数据,以执行主体部30的各种功能和处理数据,例如执行图5所示的无尘工业组装的功能。
[0053]
在一些实施例中,所述远程运动中心模型42、图像检测模型43、控制模型44、刀尖点模型31可以分别包括多个由程序代码段所组成的功能模块。所述远程运动中心模型42、图像检测模型43和控制模型44中的各个程序段的程序代码可以存储于所述计算机装置4的存储器41中,并由至少一个处理器40执行,以实现获得所述机械手臂3的移动路径和获得所述检测结果的功能。所述刀尖点模型31的各个程序段的程序代码可以存储于所述主体部30的存储器301中,并由至少一个处理器300所执行,以实现获得校准所述刀尖点的功能。
[0054]
本领域技术人员应该了解,图1和图2示出的所述工业组装系统1的结构并不构成本技术实施例的限定,既可以是总线型结构,也可以是星形结构,所述工业组装系统1还可以包括比图示更多或更少的其他硬件或者软件,或者不同的部件布置。
[0055]
需要说明的是,所述工业组装系统1仅为举例,其他现有的或今后可能出现的电子产品或硬件设备如可适应于本技术,也应包含在本技术的保护范围以内,并以引用方式包含于此。
[0056]
应该了解,所述实施例仅为说明之用,在专利申请范围上并不受此结构的限制。
[0057]
如图5所示,所述工业组装方法具体包括以下步骤,根据不同的需求,该流程图中步骤的顺序可以改变,某些步骤可以省略。
[0058]
步骤s1,远程运动中心模型42将超净工作台10的第一开口101设定为机械手臂3的远程运动中心,依据所述远程运动中心获得所述机械手臂3的组装参数。
[0059]
在一个实施例中,远程运动中心模型42仿真模拟所述工业组装系统1,将所述第一开口101设置为所述机械手臂3的远程运动中心,模拟并计算所述机械手臂3的第二连杆33和第一夹具34通过所述第一开口101进入所述超净工作台10的移动范围阈值,以及所述机械手臂3的组装参数,所述组装参数包括所述第一连杆32和所述第二连杆33的连接长度和连接角度。所述移动范围阈值包括:所述第二连杆33和所述第一夹具34在所述第一开口101内进行移动并且不会碰撞到所述第一开口101的移动范围。
[0060]
在一个实施例中,刀尖点模型31将所述检测设备5、所述除尘设备6、所述组装设备7设定所述机械手臂3的刀尖点,并对所述机械手臂3的刀尖点进行校正(例如,利用五点校正法进行校准),获得目标刀尖点;所述目标刀尖点包括:所述检测设备5所在的第一位置、
所述除尘设备6所在的第二位置、所述组装设备7所在的第三位置。
[0061]
步骤s2,根据所述组装参数校准所述机械手臂3。
[0062]
在一个实施例中,用户按照计算得到的连接长度和连接角度,利用所述扣环组件35连接所述第一连杆32和所述第二连杆33。
[0063]
步骤s3,控制所述机械手臂3的第一夹具34夹取摄像头模块c,计算所述机械手臂3的第一移动路径,控制所述机械手臂3依据所述第一移动路径将所述摄像头模块c移送至位于所述超净工作台10的检测设备5。
[0064]
在一个实施例中,所述控制模型44控制所述机械手臂3下达夹取指令,所述第一夹具34响应所述夹取指令,夹持放置在所述超净工作台10之外的物料区g的所述摄像头模块c;所述远程运动中心模型42根据所述检测设备5所在的第一位置计算第一移动路径,所述第一移动路径包括所述第一夹具34通过所述第一开口101进入所述超净工作台10,移动至所述第一位置的移动路径;所述控制模型44控制所述机械手臂3,依据所述第一移动路径将所述摄像头模块c移送至位于所述超净工作台10的检测设备5的第一位置处。
[0065]
步骤s4,利用所述检测设备5检测所述摄像头模块c,获得第一次检测结果。
[0066]
在一个实施例中,所述检测设备5包括第二夹具51、显微摄影设备52、第三开口531、供光设备532。所述第三开口531用于作为所述第一位置;所述第二夹具51响应所述计算机装置4的撕取指令,对所述第一夹具34夹持的摄像头模块c的保护膜进行撕取;所述供光设备532为所述显微摄影设备52提供光源;所述显微摄影设备52通过所述第三开口531观测并获取被撕取保护膜后的所述摄像头模块c的图像;所述计算机装置4的图像检测模型43获取所述摄像头模块c的图像,利用灰尘检测算法(例如,opencv算法)获得第一次检测结果,所述第一次检测结果包括:所述摄像头模块c有灰尘和所述摄像头模块c无灰尘。
[0067]
步骤s5,当所述第一次检测结果指示所述摄像头模块c有灰尘时,执行步骤s6;当所述第一次检测结果或第二次检测结果指示所述摄像头模块c无灰尘时,执行步骤s9。
[0068]
步骤s6,计算所述机械手臂3的第二移动路径,控制所述机械手臂3,依据所述第二移动路径将所述摄像头模块c移送至位于所述超净工作台10的除尘设备6,利用所述除尘设备6对所述摄像头模块c进行除尘。
[0069]
在一个实施例中,所述远程运动中心模型42计算所述机械手臂3的第二移动路径,包括:根据所述检测设备5所在的第一位置和所述除尘设备6所在的第二位置计算所述第二移动路径,所述第二移动路径包括所述第一夹具34从所述第一位置移动至所述第二位置的移动路径;所述控制模型44控制所述机械手臂3,依据所述第二移动路径将所述摄像头模块c移送至位于所述超净工作台10的除尘设备6。
[0070]
在一个实施例中,所述除尘设备6包括抽气设备60和吹气设备61,所述除尘设备6响应所述计算机装置4的除尘指令,对所述摄像头模块c进行预设时间(例如,30秒)的除尘。当所述摄像头模块c有灰尘时,该灰尘的部分灰尘(或者全部灰尘)可以由所述吹气设备61吹落,或者由所述抽气设备60抽离所述摄像头模块c。需要说明的是,为保证所述超净工作台10中的无尘环境,吹落的灰尘也会由所述抽气设备60抽离所述超净工作台10。
[0071]
步骤s7,计算所述机械手臂3的第三移动路径,控制所述机械手臂3,依据所述第三移动路径将除尘后的所述摄像头模块c移送至所述检测设备5,利用所述检测设备5对所述除尘后的摄像头模块c进行检测,获得第二次检测结果。
[0072]
在一个实施例中,当除尘结束后,所述远程运动中心模型42计算所述机械手臂3的第三移动路径,包括:根据所述除尘设备6所在的第二位置和所述检测设备5所在的第一位置计算所述第三移动路径,所述第三移动路径包括所述第一夹具34从所述第二位置移动至所述第一位置的移动路径;所述控制模型44控制所述机械手臂3,依据所述第三移动路径将除尘后的所述摄像头模块c移送至所述检测设备5,所述检测设备5对所述除尘后的摄像头模块c进行检测,获得第二次检测结果,所述第二次检测结果包括:所述摄像头模块c有灰尘和所述摄像头模块c无灰尘。需要说明的是,所述检测设备5获得所述第二次检测结果的过程,除撕取保护膜外与前述获得所述第一次检测结果的过程相同,不再赘述。
[0073]
步骤s8,当所述第二次检测结果指示所述摄像头模块c无灰尘时,执行步骤s9,当所述第二次检测结果指示所述摄像头模块c有灰尘时,执行步骤s11。
[0074]
步骤s9,计算所述机械手臂3的第四移动路径,控制所述机械手臂3,依据所述第四移动路径将所述摄像头模块c移送至位于所述超净工作台10的组装设备7,利用所述组装设备7对所述摄像头模块c和所述手机模块ph进行组装。
[0075]
在一个实施例中,所述远程运动中心模型42计算所述机械手臂3的第四移动路径,包括:根据所述检测设备5所在的第一位置和所述组装设备7所在的第三位置计算所述第四移动路径,所述第四移动路径包括所述第一夹具34从所述第一位置移动至所述第三位置的移动路径;所述控制模型44控制所述机械手臂3,依据所述第四移动路径将所述摄像头模块c移送至位于所述超净工作台10的组装设备7。
[0076]
在一个实施例中,所述组装设备7的组装治具70对所述摄像头模块c和所述手机模块ph进行组装。
[0077]
步骤s10,当对所述摄像头模块c和手机模块ph进行组装后,所述远程运动中心模型42计算所述第一夹具34从所述组装设备7所在的第三位置,通过所述第一开口101移出所述超净工作台的第二退出路径;所述控制模型44控制所述机械手臂3依据所述第二退出路径移出所述超净工作台10。
[0078]
步骤s11,所述远程运动中心模型42计算所述第一夹具34从所述检测设备5所在的所述第一位置,通过所述第一开口101移出所述超净工作台10的第一退出路径;所述控制模型44控制所述机械手臂3,依据所述第一退出路径将所述摄像头模块c移出所述超净工作台10。
[0079]
在一个实施例中,所述机械手臂3依据所述第一退出路径将所述摄像头模块c移出所述超净工作台10,到达预设的摄像头模块c回收区r;所述控制模型44控制所述机械手臂3下达放置指令,所述第一夹具34用于响应所述放置指令,将所述摄像头模块c放置在所述回收区r。需要说明的是,之后所述工业组装系统1会利用所述机械手臂3,夹取所述物料区g的其他摄像机模块进行下一次所述工业组装方法。
[0080]
应该了解,所述实施例仅为说明之用,在专利申请范围上并不受此结构的限制。
[0081]
对于本领域技术人员而言,显然本技术不限于上述示范性实施例的细节,而且在不背离本技术的精神或基本特征的情况下,能够以其他的具体形式实现本技术。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本技术的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本技术内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。此
外,显然“包括”一词不排除其他单元或,单数不排除复数。装置权利要求中陈述的多个单元或装置也可以由一个单元或装置通过软件或者硬件来实现。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。
[0082]
最后所应说明的是,以上实施例仅用以说明本技术的技术方案而非限制,尽管参照以上较佳实施例对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。