1.本实用新型涉及无人机技术领域,尤其涉及一种具有折叠式舱门的无人机机舱。
背景技术:
2.目前无人机机舱产品有平对开舱门、翻盖舱门,外形方正,产品结构较为单一,平对开舱门是目前主要的机舱开盖形式,平对开舱门或翻盖舱门结构形式中,左右舱门分别由一个独立电机驱动,两边结构相互独立,这种舱门虽然结构简单但打开时所占空间较大,需要保证左右舱门打开时波及范围内无障碍物,这样对舱门打开时机舱的存放环境有一定严苛的要求。
技术实现要素:
3.针对现有技术的不足,本实用新型拟解决的技术问题是,提供一种具有折叠式舱门的无人机机舱,该机舱的舱门为不同于当前机舱产品所使用的平对开舱门、翻盖舱门的一种折叠式舱门。
4.本实用新型提供解决所述技术问题采用的技术方案是:
5.一种具有折叠式舱门的无人机机舱,其特征在于,所述机舱包括:折叠式舱门和升降机构,所述折叠式舱门滑动安装在无人机机舱的出舱口,在出舱口沿长度方向设置有舱门滑轨14,折叠式舱门12与升降机构连接,由升降机构驱动折叠式舱门12沿舱门滑轨14水平伸缩;所述升降机构在折叠式舱门12折叠在边缘位置时不干涉无人机的出舱。
6.所述升降机构包括:三相反应式步进电机1、锥齿轮换向箱2、光杆3、升降丝杆4、升降平台5、升降滑轨6、升降平台固定滑块7、丝杆螺母座11、舱门支撑杆13、联轴器15;
7.所述三相反应式步进电机1设于无人机机舱内,且位于出舱口的正下方,所述三相反应式步进电机1具有两个水平输出端,所述三相反应式步进电机1的两个输出端分别通过联轴器15连接有一个光杆3,此时三相反应式步进电机1位于两个光杆中心,两个光杆3另一端分别连接一个锥齿轮换向箱2的输入端,两个锥齿轮换向箱2的输出端分别连接有一个升降丝杆4,两个升降丝杆均与光杆垂直,两个升降丝杆4的上端通过丝杆螺母座11与升降平台5的两个相对边固定在一起,所述升降平台5由相互垂直的四根支杆构成,升降平台5内部中空,相对的两根支杆平行,未连接丝杆螺母座11的两根支杆通过滑块在升降滑轨6上滑动;所述丝杆螺母座11上有螺纹孔,升降丝杆4沿螺纹孔旋进旋出,升降丝杆4与丝杆螺母座11通过螺纹连接,在两个丝杆螺母座11的相对侧面固定升降平台5的两根支杆;
8.在升降平台5上垂直于舱门滑轨14的一个支杆上安装有升降平台固定滑块7,所述升降平台通过升降平台固定滑块7与舱门支撑杆13的一端转动连接;
9.所述折叠式舱门12包括:多块铝合金舱门板8、及转动连接相邻铝合金舱门板的不锈钢铰链连接件9、用于与升降机构连接的折叠门固定滑块10;相邻铝合金舱门板8之间通过不锈钢铰链连接件9进行连接,最边缘的一块铝合金舱门板8上设置有折叠门固定滑块10,所述舱门支撑杆13的另一端与折叠门固定滑块10固定连接,且舱门支撑杆13与升降平
台固定滑块7的连接点与舱门支撑杆13与折叠门固定滑块10的连接点位于相反侧。
10.所述升降平台固定滑块7上有转轴,升降平台固定滑块7和折叠门固定滑块10联合转轴构成的运动副中既有平移副又有旋转副。
11.所述机舱的出舱口为矩形,折叠式舱门的展开形状按照机舱出舱口配合设置,优选地,机舱的出舱口一般在45cm*32cm左右,此时铝合金舱门板8的尺寸为30cm*3.5cm左右;无人机位于停机坪上,所述三相反应式步进电机1位于停机坪的下方,舱门支撑杆13将折叠式舱门12关住时不影响无人机存放,打开时保证舱门支撑杆13为位于边缘,不影响无人机出舱,升降平台5的中空面积能供无人机进出。
12.在出舱口内部非安装舱门滑轨14的两侧顶部中间各装一个压电压力传感器16,两个压电压力传感器的输出端均接入三相反应式步进电机1驱动电路中lmd348的同向输入端。
13.与现有技术相比,本发明的有益效果是:
14.本实用新型的无人机舱具有折叠式舱门,能够通过舱门的机械折叠和铺开来实现舱门的打开与闭合。平对开舱门在打开时,两舱门会平移到超出机舱本身宽度的范围内,而翻盖机舱在打开时,两舱门会在翻折时波及到超出机舱本身高度的范围内,这就要求在舱门打开时机舱所处环境要能够保证在超出机舱一定宽度或高度(所超出的宽度和高度近似为舱门的宽度)内无障碍物,对舱门打开时机舱的存放环境有一定严苛的要求。本实用新型采用折叠式舱门在打开和闭合时均不会超出机舱本身宽度的范围,而在高度上仅仅会超出机舱本身高度外近似一个舱门板的宽度,这个超出高度与翻盖式舱门超出高度相比要小得多。这样就起到了节省空间的效果,且几乎无需考虑舱门打开时机舱波及范围内环境中有无障碍。
15.此外,本实用新型采用三相反应式步进电机实现驱动,比两相步进电机运行起来平稳性更好,有更好的低速平稳性及输出力矩,因三相结构的关系,激磁电流的三次谐波被抵消,振动和噪音比两相步进电机小,分辨率是两相步进电机的1.5倍,并且能进行高精度位置确定。
附图说明
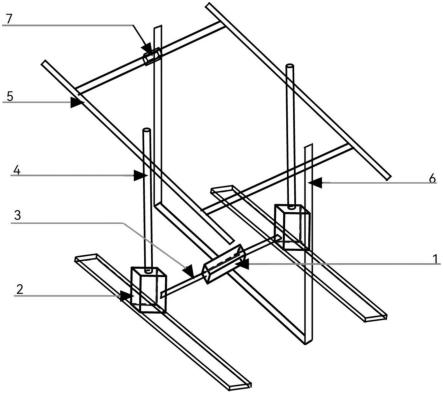
16.图1为本实用新型具有折叠式舱门的无人机机舱中的升降机构的结构示意。
17.图2为本实用新型具有折叠式舱门的无人机机舱中的相邻两块铝合金舱门板的连接结构示意图;
18.图3为本实用新型具有折叠式舱门的无人机机舱中的多块铝合金舱门板的仰视连接结构示意图;
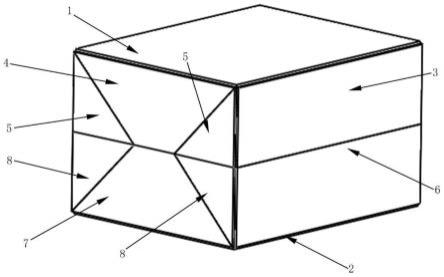
19.图4为本实用新型具有折叠式舱门的无人机机舱中的折叠舱门未完全伸展开时的主视结构示意图;
20.图5为本实用新型具有折叠式舱门的无人机机舱中的折叠式舱门完全伸展开时的俯视结构示意图;
21.图6为本实用新型具有折叠式舱门的无人机机舱中的舱门开合与升降机构联动结构示意图。
22.图7为本实用新型具有折叠式舱门的无人机机舱中的丝杆螺母座与升降平台和升
降丝杆之间的连接结构示意图。
23.图8为本实用新型具有折叠式舱门的无人机机舱中的三相反应式步进电机的驱动电路结构示意图。
24.图9为本实用新型具有折叠式舱门的无人机机舱中出舱口与折叠式舱门的安装结构示意图(含折叠式舱门)。
25.图10为本实用新型具有折叠式舱门的无人机机舱中的出舱口的结构示意图(不含折叠式舱门)。
26.其中,三相反应式步进电机1、锥齿轮换向箱2、光杆3、升降丝杆4、升降平台5、升降滑轨6、升降平台固定滑块7、铝合金舱门板8、不锈钢铰链连接件9、折叠门固定滑块10、丝杆螺母座11、折叠式舱门12、舱门支撑杆13、舱门滑轨14、联轴器15、压电压力传感器16。
具体实施方式
27.下面结合实施例及附图进一步解释本实用新型,但并不以此作为对本技术保护范围的限定。
28.本实用新型具有折叠式舱门的无人机机舱(参见图1-6),包括:折叠式舱门和升降机构,所述折叠式舱门滑动安装在无人机机舱的出舱口,在出舱口沿长度方向设置有舱门滑轨14,折叠式舱门与升降机构连接,由升降机构驱动折叠式舱门沿舱门滑轨水平伸缩;所述升降机构在折叠式舱门折叠在边缘位置时不干涉无人机的出舱。
29.下述为本实用新型一种优选的实例。
30.所述升降机构包括:三相反应式步进电机1、锥齿轮换向箱2、光杆3、升降丝杆4、升降平台5、升降滑轨6、升降平台固定滑块7、丝杆螺母座11、舱门支撑杆13、联轴器15;
31.所述三相反应式步进电机1设于无人机机舱内,且位于出舱口的正下方,所述三相反应式步进电机1具有两个水平输出端,所述三相反应式步进电机1的两个输出端分别通过联轴器15连接有一个光杆3,此时三相反应式步进电机1位于两个光杆3中心,两个光杆3另一端分别通过卡槽或键连接方式连接一个锥齿轮换向箱2的输入端,两个锥齿轮换向箱2的输出端也分别通过卡槽或键连接方式连接有一个升降丝杆4,两个升降丝杆4均与光杆3垂直,两个升降丝杆4的上端通过丝杆螺母座11与升降平台5的两个相对边固定在一起,所述升降平台5由相互垂直的四根支杆构成,升降平台5内部中空,相对的两根支杆平行,未连接丝杆螺母座11的两根支杆通过滑块在升降滑轨6上滑动,升降平台5在升降丝杆4的驱动下可沿升降滑轨6进行上下运动;所述丝杆螺母座11上有螺纹孔,升降丝杆4可沿螺纹孔旋进旋出,升降丝杆4与丝杆螺母座11通过螺纹连接,在两个丝杆螺母座11的相对侧面固定升降平台5的两根支杆,可以采用焊接或螺栓连接等形式实现升降平台4与丝杆螺母座11的固定。
32.所述锥齿轮换向箱2通过支撑板固定支撑在机舱内部空间的某个位置上。
33.在升降平台5上垂直于舱门滑轨14的一个支杆上安装有升降平台固定滑块7,所述升降平台5通过升降平台固定滑块7与舱门支撑杆13的一端转动连接;
34.所述折叠式舱门12(参见图2-5)包括:多块铝合金舱门板8、及转动连接相邻铝合金舱门板的不锈钢铰链连接件9、用于与升降机构连接的折叠门固定滑块10。相邻铝合金舱门板8之间通过不锈钢铰链连接件9进行连接,最边缘的一块铝合金舱门板8上设置有折叠
门固定滑块10,所述舱门支撑杆13的另一端与折叠门固定滑块10固定连接,且舱门支撑杆13与升降平台固定滑块7的连接点与舱门支撑杆13与折叠门固定滑块10的连接点位于相反侧,当升降平台5上升时折叠式舱门12逐渐关闭,当升降平台5下降时,折叠式舱门12逐渐打开。
35.升降平台固定滑块7上有转轴,转轴使得升降平台固定滑块7能够在相应的支杆上转动,升降平台固定滑块7同时与舱门支撑杆13通过焊接或螺栓连接方式固定在一起,升降平台固定滑块7转动时也会带动舱门支撑杆13相对支杆转动,同时在升降平台5的升降作用下,实现舱门支撑杆13与升降平台5之间夹角的改变,进而实现舱门支撑杆13的移动和摆动。舱门支撑杆13另一端固定在折叠门固定滑块10上,折叠门固定滑块10上也有转轴,折叠门固定滑块10与铝合金舱门板8通过焊接或螺栓连接固定在一起,折叠门固定滑块10与舱门支撑杆13另一端转动连接,实现舱门支撑杆13相对铝合金舱门板8的转动,利于铝合金舱门板展平。
36.升降平台固定滑块7和折叠门固定滑块10联合转轴构成的运动副中既有平移副又有旋转副,可以保证舱门支撑杆13在两者之间进行移动和摆动,在舱门支撑杆13进行移动和摆动时带动折叠式舱门板12沿舱门滑轨14进行横向折叠展开运动。在升降平台5上升时舱门支撑杆13在随着升降平台5上升的同时向左摆动,折叠式舱门12逐渐关闭,在升降平台5下降时,舱门支撑杆13在随着升降平台5下降的同时向右摆动,折叠式舱门12逐渐打开。
37.折叠式舱门板12可沿舱门滑轨14进行横向折叠展开运动。
38.图1:升降机构的三相反应式步进电机1两端输出转矩带动光杆3转动,光杆后面是锥齿轮换向箱2,通过锥齿轮换向箱2使三相反应式步进电机1的输出转换方向,锥齿轮换向箱2带动升降丝杆4转动,这部分是主动转动,与升降平台5相垂直的是升降滑轨6,升降平台5通过滑块在升降滑轨6上滑动,实现升降平台5的被动上升,升降丝杆4起主要支撑以及动力输出,升降滑轨6起支撑与缓冲作用,主动转动与被动上升同时工作、相互配合构成了升降机构。升降平台5进行上下移动,无人机机舱顶部开舱。
39.所述机舱的出舱口为矩形,折叠式舱门12的展开形状按照机舱出舱口配合设置,根据实际应用的无人机机舱大小来具体确定折叠式舱门的尺寸,机舱的出舱口一般在45cm*32cm左右,此时铝合金舱门板8的尺寸为30cm*3.5cm左右,整个折叠式舱门12约由十二个铝合金舱门板8铰接而成。存放无人机的机舱,升降平台5上方为机舱的开口,开口设置折叠式舱门。升降平台5使舱门支撑杆13进行移动和摆动,无人机位于停机坪上,所述三相反应式步进电机1位于停机坪的下方。舱门支撑杆13在折叠式舱门12关住时不影响无人机存放,打开时保证舱门支撑杆13为位于边缘,不影响无人机出舱。升降平台5的中空面积能供无人机进出。
40.所述折叠式舱门12的开合设计为折叠式开合,铝合金舱门板8之间通过不锈钢铰链连接件9进行连接,其中端部铝合金舱门板8和舱门支撑杆13通过折叠门固定滑块10进行连接,折叠式舱门12可沿舱门滑轨14进行横向折叠展开运动。
41.图6:当三相反应式步进电机1工作时,升降平台5上升和下降带动舱门支撑杆13移动和摆动,进而带动折叠式舱门12沿舱门滑轨14进行横向展开或折叠运动,实现折叠式舱门12的展开或折叠从而实现舱门的关闭和打开运动。
42.图8:三相反应式步进电机1开关的动作会改变如图所示lm348d比较电压输入端电
压的大小,从而控制三相反应式步进电机1运转情况。lm348d的同相输入端为基准电压端,其反向输入端为比较电压输入端,当比较电压输入端的电压小于基准电压时,lm348d的输出端上输出高电平,使三极管bd237导通,从而使三相反应式步进电机1能够实现正转或反转;当比较电压输入端的电压高于基准电压时,在lm348d的输出端上输出低电平,三极管bd237截止,三相反应式步进电机1停转。
43.作为优选地,所述为了在折叠式舱门12完成折叠或展开动作使舱门完全打开或关闭后能实现三相反应式步进电机1自动停转,在出舱口内部非安装舱门滑轨14的两侧顶部中间各装一个压电压力传感器16,所述压电压力传感器可将受到的压力转换为与所受压力成比例关系的电压输出,具体设置为当压电压力传感器16上压电材料受到的外力达到100kpa(100kpa是1公斤压力即一平方厘米上的压力是1公斤)这一阈值时,输出电压会降低到低于三相反应式步进电机1驱动电路中lm348d的反向输入端即比较电压端的电压范围内;当压电压力传感器16上压电材料受到的外力没有达到100kpa这一阈值时,输出电压保持在高于三相反应式步进电机1驱动电路中lm348d的反向输入端即比较电压端的电压范围内。将两压电压力传感器16输出电压都接入三相反应式步进电机1驱动电路中lm348d的同向输入端即基准电压端,当折叠式舱门12在完成折叠或展开动作使舱门的完全打开或关闭时,两压电压力传感器16所受到的来自折叠式舱门12的压力会达到阈值,使压电压力传感器16输出电压变为小于开关打开时的三相反应式步进电机1驱动电路中lm348d的反向输入端即比较电压端的电压,这时比较电压输入端的电压高于基准电压,在lm348d的输出端上输出低电平,三极管bd237截止,三相反应式步进电机1停转,实现了无需人工手动关闭三相反应式步进电机1开关而在完成舱门开关后自动停转。当折叠式舱门12在没有完成折叠或展开动作使舱门的完全打开或关闭时,压电压力传感器16所受到的来自折叠式舱门12的压力不会达到阈值,输出电压保持大于开关打开时的三相反应式步进电机1驱动电路中lm348d的反向输入端即比较电压端的电压,这时比较电压输入端的电压低于基准电压,在lm348d的输出端上输出高电平,三极管bd237导通,三相反应式步进电机1运转。
44.本实用新型未述及之处适用于现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。