1.本实用新型属于机器人技术领域,具体涉及一种行走机构及排爆机器人。
背景技术:
2.排爆机器人是可代替排爆人员对爆炸装置或武器实施侦察、转移、拆解和销毁的自动化装置。目前,排爆机器人大多会针对排爆现场路况而选用履带式或轮式行走机构,履带式行走方式能够应对坑洼、沙地以及具有废弃物堆积的复杂现场路况,但无法满足平坦硬化路面下的高速行驶需求,而轮式行走机构能够在平坦硬化路面下高速行驶以快速接近目的地,从而提高排爆效率,但是无法应对复杂恶劣的现场环境,基于排爆现场的路况多样化、复杂化,如何兼顾行进速度和对复杂路况的适应性,是当前排爆机器人设计开发中亟需解决的问题。
技术实现要素:
3.本实用新型实施例提供一种行走机构及排爆机器人,旨在提高排爆机器人的行进速度和应对复杂路况的能力,从而提升排爆效率。
4.为实现上述目的,本实用新型采用的技术方案是:第一方面,提供一种行走机构,包括两排行走轮和两条履带;其中,两排行走轮用于对称连接在排爆机器人的机架两侧,并用于滚压地面,每排行走轮包括沿机架的前后方向对齐并间隔分布的至少两个行走轮,且每个行走轮的轮毂上均固定连接有履带轮,履带轮与行走轮同轴,且履带轮的直径小于行走轮的直径;每条履带与位于机架同侧的各个履带轮分别啮合连接,在其中一个或多个行走轮陷入地面时,履带的相应部位与地面抵触并滚压地面。
5.结合第一方面,在一种可能的实现方式中,每排行走轮包括前后对齐并间隔分布的三个行走轮,其中两个相邻的行走轮为主动轮,另一个行走轮为从动轮。
6.一些实施例中,每两个前后相邻的行走轮之间均设有支撑辊组,支撑辊组固定连接于机架上,且向下支撑于履带的内侧带面上。
7.示例性的,支撑辊组包括连接架和多个辊轮;其中,连接架固定连接于机架上;多个辊轮沿机架的前后方向对齐并间隔分布于连接架上,各个辊轮用于一并滚压履带。
8.举例说明,连接架上具有成l型分布的竖板和横板,竖板与机架的侧壁贴合并固定连接,横板与机架的底壁贴合并固定连接。
9.结合第一方面,在一种可能的实现方式中,行走轮包括轴座、轮轴,以及轮毂;其中,轴座固定连接于机架的侧壁上;轮轴穿设于轴座内并与轴座转动连接,轮轴远离机架侧壁的一端设有法兰盘;轮毂固定连接于法兰盘上,轮毂上套设有轮胎,且轮毂上于其侧方固定连接有履带轮。
10.一些实施例中,轮毂朝向机架的侧壁上设有法兰套,履带轮的侧壁与法兰套固定连接。
11.示例性的,履带轮的中心具有适于环套于轴座外围的通腔。
12.举例说明,履带为双面齿形橡胶带。
13.本实用新型提供的行走机构的有益效果在于:与现有技术相比,本实用新型行走机构,在平坦硬化路面上,两排行走轮直接滚压路面形成轮动行进方式,相较于履带式行进方式能够提高行进速度,当进入沙地、泥沼等坑洼软质路面而出现行走轮陷入地面下的情况时,履带能够与地面接触,利用履带与地面间相对较大的接触面积而避免行走轮持续下陷,并在履带的驱动下实现稳定行进,从而使排爆机器人基于轮式行走方式还能够兼顾应对复杂路况的能力,减少排爆机器人向排爆目标点的行进耗时,从而提升排爆效率。
14.第二方面,本实用新型实施例还提供了一种排爆机器人,包括上述行走机构。本实用新型实施例提供的排爆机器人利用上述行走机构,能够在平坦硬化路面下提高行驶速度,并具备应对复杂恶劣路况的能力,从而能够节省向排爆点行进的时间,提高排爆效率。
附图说明
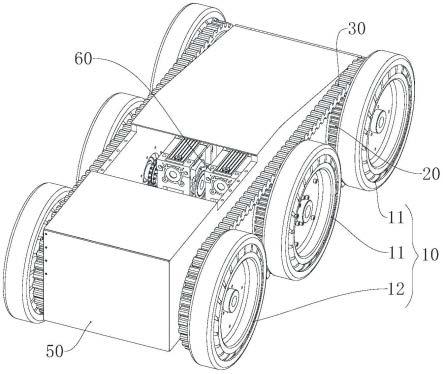
15.图1为本实用新型实施例提供的行走机构的立体结构示意图;
16.图2为本实用新型实施例提供的行走机构的正视结构示意图;
17.图3为本实用新型实施例所采用的支撑辊组的立体结构示意图;
18.图4为本实用新型实施例所采用的行走轮的剖视结构示意图;
19.图5为本实用新型实施例所采用的行走轮的爆炸结构示意图。
20.图中:10、行走轮;11、主动轮;12、从动轮;101、轴座;102、轮轴;1020、法兰盘;103、轮毂;104、轮胎;105、法兰套;20、履带轮;201、通腔;30、履带;40、支撑辊组;41、连接架;411、竖板;412、横板;42、辊轮;50、机架;60、驱动机构。
具体实施方式
21.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者间接在另一个元件上。需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者若干个该特征。在本发明的描述中“多个”的含义是两个或两个以上,除非另有明确具体的限定。
23.请一并参阅图1至图5,现对本实用新型提供的行走机构进行说明。所述行走机构,包括两排行走轮10和两条履带30;其中,两排行走轮10用于对称连接在排爆机器人的机架50两侧,并用于滚压地面,每排行走轮10包括沿机架50的前后方向对齐并间隔分布的至少两个行走轮10,且每个行走轮10的轮毂103上均固定连接有履带轮20,履带轮20与行走轮10同轴,且履带轮20的直径小于行走轮10的直径;每条履带30与位于机架50同侧的各个履带轮20分别啮合连接,在其中一个或多个行走轮10陷入地面时,履带30的相应部位与地面抵
触并滚压地面。
24.在本实施例中,两排行走轮10的分布方式可看作是阵列分布,如每排为三个行走轮10,那就相当于是2
×
3的阵列分布方式。采用两排行走轮10滚压地面的行走方式相当于轮式行走,适用于平坦硬化路面的高速行进,当进入复杂恶劣路况时,比如排爆点处于质地松软的沙地环境中,此时行走轮10容易陷入地面中,在陷入一定深度后履带30会抵压在地面上,排爆机器人在履带30的带动下进行行走,从而避免因行走轮10深陷地下而无法行走的情况,当然,应当理解的是,对于泥潭、沼泽等地面情况与沙地类似,均能够履带30的辅助作用确保排爆机器人能够顺利行进通过。
25.本实施例提供的行走机构,与现有技术相比,在平坦硬化路面上,两排行走轮10直接滚压路面形成轮动行进方式,相较于履带30式行进方式能够提高行进速度,当进入沙地、泥沼等坑洼软质路面而出现行走轮10陷入地面下的情况时,履带30能够与地面接触,利用履带30与地面间相对较大的接触面积而避免行走轮10持续下陷,并在履带30的驱动下实现稳定行进,从而使排爆机器人基于轮式行走方式还能够兼顾应对复杂路况的能力,减少排爆机器人向排爆目标点的行进耗时,从而提升排爆效率。
26.在一些实施例中,参见图2,每排行走轮10包括前后对齐并间隔分布的三个行走轮10,其中两个相邻的行走轮10为主动轮11,另一个行走轮10为从动轮12。每排采用三个行走轮10能够缩短行走轮10的前后间距,一方面能够提高行走机构对于机架50的支撑稳定性,另一方面能够保证与路面间充足的接触点,从而保证整体结构与地面间的相对摩擦力以提升行走动力;另外,相邻两个行走轮10作为主动轮11,由驱动机构60直接提供动力,同时另一个行走轮10作为从动轮12,能够利用履带30自身所具备的传动力而随主动轮11同向转动,有利于简化动力传输结构,并确保各个行走轮10之间的旋转一致性,从而提升行进稳定性。
27.具体地,请参阅图2及图3,本实施例中每两个前后相邻的行走轮10之间均设有支撑辊组40,支撑辊组40固定连接于机架50上,且向下支撑于履带30的内侧带面上。通过支撑辊组40对处于相邻履带轮20之间的履带30部分进行支撑,能够避免经过坑洼路面时履带30本身受力拉扯而断裂,提高履带30正常使用寿命。
28.作为上述支撑辊组40的一种具体实施方式,请参阅图3,支撑辊组40包括连接架41和多个辊轮42;其中,连接架41固定连接于机架50上;多个辊轮42沿机架50的前后方向对齐并间隔分布于连接架41上,各个辊轮42用于一并滚压履带30。连接方式稳定可靠,同时利用多个辊轮42前后排列的方式能够减小单个辊轮42的直径,从而保证辊轮42能够更靠近于履带轮20进行设置,减小履带30的悬空间距,提升对履带30的支撑效果。
29.需要说明的是,为提高连接稳定性和抗冲击能力,本实施例中的连接架41上具有成l型分布的竖板411和横板412,竖板411与机架50的侧壁贴合并固定连接,横板412与机架50的底壁贴合并固定连接。利用组成l型结构的竖板411和横板412能够贴扣在机架50的下部边角位置,尤其是横梁与机架50底壁的贴合固定能够保证连接架41的垂向连接强度,从而提高履带30负载能力和抗冲击能力。
30.一些实施例中,如图4和图5所示,行走轮10包括轴座101、轮轴102,以及轮毂103;其中,轴座101固定连接于机架50的侧壁上;轮轴102穿设于轴座101内并与轴座101转动连接,轮轴102远离机架50侧壁的一端设有法兰盘1020;轮毂103固定连接于法兰盘1020上,轮
毂103上套设有轮胎104,且轮毂103上于其侧方固定连接有履带轮20。
31.需要说明的是,对于主动轮11而言,其轮轴102与驱动机构60连接,因此其轮轴102的长度应长于从动轮12的轮轴102。在此将轮毂103与轴座101固定连接,同时利用轮毂103的侧壁为履带轮20提供安装基础,从而实现轮轴102对轮毂103和履带轮20的同步驱动,使轮胎104与履带30同步作用,以提高行走驱动力,尤其能够提高在松软路况下的行走能力。
32.具体地,本实施例中轮毂103朝向机架50的侧壁上设有法兰套105,履带轮20的侧壁与法兰套105固定连接。通过法兰套105作为轮毂103与履带轮20之间的连接桥梁,能够使轮胎104和履带30之间具备充足的横向空间,避免两者互相干涉。
33.可选地,为提高结构紧凑性,本实施例中履带轮20的中心具有适于环套于轴座101外围的通腔201。履带轮20位于轮毂103和机架50之间,同时采用具有通腔201的空心结构的履带轮20,能够将轴座101置于该通腔201内,从而节约机架50横向空间,避免排爆机器人的整体宽度过大而影响其通过性。
34.示例性的,参见图2,本实施例中履带30为双面齿形橡胶带。内侧面的带齿作为与履带轮20啮合配合的结构传递动力,外侧面的带齿能够提高抓地力,从而提高履带30驱动力,提升排爆机器人通过松软地面的能力。
35.基于同一发明构思,结合图1至图5理解,本技术实施例还提供一种排爆机器人,包括上述行走机构。本实用新型实施例提供的排爆机器人利用上述行走机构,能够在平坦硬化路面下提高行驶速度,并具备应对复杂恶劣路况的能力,从而能够节省向排爆点行进的时间,提高排爆效率。
36.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。