一种基于soa的环境自适应航路规划方法
技术领域
1.本发明属于民用航空器空中交通流量管理技术领域,尤其涉及一种基于soa的环境自适应航路规划方法。
背景技术:
2.随着我国民航业的迅速发展,航班运输量不断增加,民航运输逐渐从低密度模式向高密度模式转变,空域环境对飞行的影响日益突出。环境自适应航路规划方法是空中交通流量管理在航班运行过程中的实时应用策略,作用于恶劣天气或航空器冲突等情况下的航路实时规划。面对动态空域运行环境,建立基于服务的分布式体系架构。当航空器遵循计划航路在空域中运行时,各利益相关方将相应业务信息发送至体系架构的信息传输平台中,各业务模块基于获取的动态信息,判断计划航路是否产生冲突,由此生成改航策略为航空器运行提供能力支持。
3.航空器在飞行过程中遭遇恶劣天气的影响,出于飞行安全和运行效率的考虑,地面根据机载气象雷达和气象中心的数据,对飞行航路进行重新规划及实时修正。然而当前都是在战略及预战术层面上,基于气象中心发布的信息对航路进行规划,对于飞行过程中遇到时变天气的情况,缺乏实时的航路规划及修正,导致管制员工作负荷和航班延误增加,且管制员协调的航路变更结果可能与机组需求不符,严重影响了航空器运行的安全性和经济性。
技术实现要素:
4.本发明的目的,在于提供一种基于soa的环境自适应航路规划方法,其通过将航路规划全生命周期所涉及的服务模块进行区块化处理,并将航路规划多重算法进行分配,分装至各类服务模块中。在航空器的计划航路遇到冲突时,各模块信息基于构建的面向服务架构(soa)进行自主信息交互,进而实现异构模型的业务功能的相互调用。此航路规划方法保证了航路规划算法所需信息的有效化处理,有效提高了信息传输及处理的实时性及高效性。
5.本发明的技术方案:
6.一种基于soa的环境自适应航路规划方法,所述方法包括:
7.s1,航空器确定实现航路规划所涉及的相关方以及所需的相关业务信息;所述利益相关方位空管部门、航空公司、气象部门,所述所需的相关业务信息至少包含:容流量预测、气象信息、冲突探测、冲突解脱;
8.s2,航空器根据所述所需的相关业务信息构建所需的相关业务模块;
9.s3,建立统一的数据处理、交换、共享平台,构建面向服务的分布式架构模型;
10.s4,各相关方向所述平台发送计划航路、空域状态信息以及气象信息,航空器的相关业务模块从所述平台获取相关信息;
11.s5,航空器的相关业务模块以接收的空域状态信息为基准,判断各自业务模块是
36.q≤q
max
37.其中:q
max
表示转弯数量的最大阈值;q表示转弯数量;θ
hc
表示转弯角度。
38.(5)s6中,安全距离归一化模型:
[0039][0040][0041]
其中:cs表示改航路径的安全距离归一化指标;rs表示改航路径和飞行受限区ffa的横向间隔;s(ai,a
i 1
)表示第i个航段的距恶劣天气的安全距离;表示第j条规划航路的安全性指标;ffa
x
表示规划航路需要绕飞的第x个ffa区;表示改航路径距第x个ffa区的最短距离;dr表示规划的整体改航路径的安全半径;
[0042]
安全距离限制模型:
[0043]
h≤h
max
[0044]
其中:h
max
表示航线间设置的最大间隔。
[0045]
(6)s6中,燃油消耗归一化模型
[0046][0047]
其中,co表示改航路径的燃油消耗指标;ν
tas
表示表示航空器真空速度;c
f1
及c
f2
为bada中计算燃油消耗率的相关系数;ti表示第i个航段的推力。
[0048]
(7)s6中,以改航航程最短、跨扇区个数最少、转弯角度最小、安全距离最大,燃油消耗最少为约束目标输出最优的实时航路,最优航路模型:
[0049]
c=min{ac
l
bc
t
cca dcs eco}
[0050]
其中:c表示各指标归一化处理后的最小代价总值,作为最优路径;a,b,c,d,e分别表示改航路径的航程权重系数、跨扇区个数权重系数、平均转弯角度权重系数、安全距离权重系数、燃油消耗权重系数。
[0051]
本发明提供多层时序网络的实时航路规划及优化方法,其通过建立多层时序网络,将影响航路规划的元素分为航空器、环境及空域结构等三层网络结构,对航空器在恶劣天气下随时间变化的运行轨迹进行切片处理,形成闭环的相互作用关系,克服空域条件的时变性对航路规划的影响,提高了航空器运行的安全性和经济性。
附图说明
[0052]
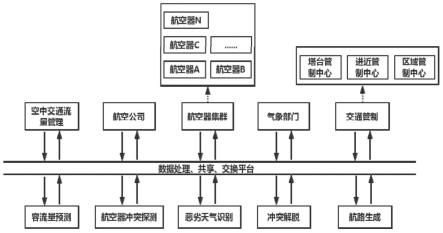
图1为本发明实施例提供的一种基于soa的环境自适应航路规划方法适用的架构图。
具体实施方式
[0053]
下面根据附图对本发明的技术方案及有益效果作进一步详细说明。
[0054]
本发明公开一种基于soa的环境自适应航路规划方法,包含了业务模块分类及构
建、面向服务的分布式运行架构构建、多目标最优的改航路径规划等三部分内容,其中业务模块涉及容/流量预测、恶劣天气识别、冲突探测及解脱等的模块化建立,面向服务的分布式运行架构构建涉及基于soa的异构模型间的交互设计,多目标最优的改航路径规划涉及基于多种约束条件的多目标参数计算及归一化处理。
[0055]
步骤是:航空器自主确定实现航路规划所涉及的利益相关方及所需的相关业务信息;根据航路规划涉及的相关方及所需信息构建业务模块;建立统一的数据处理、交换、共享平台,构建面向服务的分布式架构模型;查看动态空域环境变化是否影响计划航路,若不存在任何冲突则由各相关方实时更新空域运行状况,若存在冲突,则由航路规划业务模块根据现有限制生成最优路径;航路规划业务模块根据其他业务模块识别出的空域限制,以改航航程最短、跨扇区个数最少,转弯角度最小,安全距离最大,燃油消耗最少为约束目标输出最优的实时航路。
[0056]
此种方法考虑了动态空域环境的实时变化因素,依据航路规划相关方、业务能力及数据传输等三层逻辑结构,对航空路规划业务进行模块化处理,通过构建面向服务的分布式架构模型,形成高可靠性的环境自适应航路规划能力,克服动态空域环境运行条件的时变性对实时航路规划的影响,解决了信息交互的延迟性与重复性。该架构模型灵活性较强,其将传统策略按照具体功能模块化,便于业务模块的增加及迭代升级。航空器能够根据实际需求任意组合/调取相关业务信息,具有较高的维护性和较好的延展性,极具经济效益,应用前景广阔。
[0057]
为了达成上述目的,实现上述内容,本发明的解决方案是:
[0058]
一种基于soa的环境自适应航路规划方法,包括如下步骤:
[0059]
步骤1,航空器自主确定实现航路规划所涉及的利益相关方及所需的相关业务信息;
[0060]
步骤2,根据航路规划涉及的相关方及所需信息构建业务模块;
[0061]
步骤3,建立统一的数据处理、交换、共享平台,构建面向服务的分布式架构模型;
[0062]
步骤4,各相关方向平台输入计划航路及空域运行状态信息,相应业务模块从平台获取相关信息;
[0063]
步骤5,各业务模块以接收的空域状态信息为基准,根据自身内置模型,判断是否存在冲突;
[0064]
步骤6,航路规划业务模块根据空域运行限制,以改航航程最短、跨扇区个数最少,转弯角度最小,安全距离最大,燃油消耗最少为约束目标输出最优的实时航路;
[0065]
步骤7,航空器根据运行需要,通过该分布式架构随时组合/调取所需改航信息,并请求相关业务服务,能够有效实现环境自适应相关能力。
[0066]
如图1所示,本发明提供了一种基于soa的环境自适应航路规划方法,包括以下步骤:
[0067]
步骤1中,航空器自主确定实现航路规划所涉及的利益相关方(空管部门、航空公司)及所需的相关业务信息(空域容流量、气象信息);
[0068]
步骤2中,根据航路规划涉及的相关方及所需信息构建业务模块,每个业务模块都添加内置模型,能够有效识别航路中的各类冲突,同时提供冲突解脱的方案:
[0069]
步骤2a,构建航路点及扇区的容/流量预测业务模块。建立容/流量预测模型,使模
块能够实时提供某航路点及扇区是否可通行的信息;
[0070]
步骤2b,构建恶劣天气识别业务模块。建立恶劣天气识别模型,使模块能够根据气象部门提供的气象雷达回波图,获取飞行区域的雷达气象信息,筛选出影响航路安全的恶劣天气信息,然后利用graham扫描法对恶劣天气边界进行划定。删除反射率小于41dbz的像素点,得到当前恶劣天气的区域;
[0071]
步骤2c,构建冲突探测业务模块。建立冲突探测模型,使模块能够参照本机的飞行计划航路及生成的最优改航路径,实时判断是否存在航空器冲突;
[0072]
步骤2d,构建冲突解脱业务模块。建立冲突解脱模型,使模块能够针对航空器间的冲突,根据实际运行情况,提出绕飞或改变高度层的横向或纵向冲突解脱方案。
[0073]
步骤3中,建立统一的数据处理、交换、共享平台,构建面向服务的架构模型。架构的服务接口和具体实现相互分离,且异构模型间的消息(服务协议)是标准和开放的;
[0074]
步骤4中,各相关方按照服务架构定义的统一接口,将计划航路及空域运行状态信息发送至平台,相应业务模块从平台获取相关信息;
[0075]
步骤5中,各业务模块以接收的空域状态信息为基准,根据自身内置模型,判断各自业务模块是否与存在冲突。若存在冲突则执行步骤16,由航路规划业务模块根据现有限制生成最优路径;若不存在任何冲突则重复步骤4,由各相关方实时更新空域运行状况;
[0076]
步骤6中,航路规划业务模块根据步骤4中的空域限制,以改航航程最短、跨扇区个数最少,转弯角度最小,安全距离最大,燃油消耗最少为约束目标输出最优的实时航路。
[0077]
上述步骤16a,改航路径的航程归一化模型:
[0078][0079]
其中:c
l
表示改航路径的航程指标;ai表示航路上第i个航路点;n表示航路点的个数;l(ai,a
i 1
)表示航路点间的距离。
[0080]
上述步骤16b,航段限制模型:
[0081]
l(ai,a
i 1
)≥7.4km,i=1,2,
…
,n
[0082]
s.t.(ai,a
i 1
)∩sj=φ,i=1,...,m j=1,...,n
[0083]
其中:sj表示飞行受限区,表示航段与气象云图中的危险区域不能有交集。
[0084]
上述步骤16c,改航路径的跨扇区个数指标归一化模型:
[0085][0086]
其中:m(ai,a
i 1
):航段i所经历扇区个数;m
max
表示航段允许的最大跨扇区数量。
[0087]
上述步骤16d,跨扇区约束模型:
[0088][0089]
上述步骤16e,改航路径的平均转弯角度归一化模型:
[0090]
[0091]
其中:ti表示改航路径上第i个转弯点;θi表示第i个转弯点的转弯角度。
[0092]
上述步骤16f,转弯角度限制模型:
[0093]
θ
hc
≤900[0094]
q≤q
max
[0095]
其中:q
max
表示转弯数量的最大阈值;q表示转弯数量;θ
hc
表示转弯角度。
[0096]
上述步骤16g,改航路径的安全距离归一化模型:
[0097][0098][0099]
其中:cs表示改航路径的安全距离归一化指标;rs表示改航路径和ffa区(飞行受限区)的横向间隔;s(ai,a
i 1
)表示第i个航段的距恶劣天气的安全距离;表示第j条规划航路的安全性指标;ffa
x
表示规划航路需要绕飞的第x个ffa区;表示改航路径距第x个ffa区的最短距离;dr表示规划的整体改航路径的安全半径。
[0100]
上述步骤16h,改航路径距离限制模型:
[0101]
h≤h
max
[0102]
其中:h
max
表示航线间设置的最大间隔。
[0103]
上述步骤16i,燃油消耗归一化模型
[0104][0105]
其中,co表示改航路径的燃油消耗指标;ν
tas
表示表示航空器真空速度;c
f1
及c
f2
为bada中计算燃油消耗率的相关系数;ti表示第i个航段的推力。
[0106]
上述步骤16j,最优航路模型:
[0107]
c=min{ac
l
bc
t
cca dcs eco}
[0108]
其中:c表示各指标归一化处理后的最小代价总值,即最优路径;a,b,c,d,e分别表示改航路径的航程权重系数、跨扇区个数权重系数、平均转弯角度权重系数、安全距离权重系数、燃油消耗权重系数。
[0109]
步骤7中,航空器根据运行需要,通过该分布式架构随时组合/调取所需改航信息,并请求相关业务服务,能够有效实现环境自适应相关能力。
[0110]
基于soa的环境自适应航路规划能够帮助航空器克服,实现有效减少燃油消耗、降低管制员工作负荷、提高空域利用率的目标,同时能够有效提高恶劣天气下的飞行安全和航班准点率,为未来基于航迹的运行提供有效的航迹预测依据和建议。
[0111]
采用上述方案后,本发明提出了一种基于soa的环境自适应航路规划方法,通过分解空域环境变化的相关信息,对航路规划所需的业务要素进行模块化处理,进而构建了一个面向服务的分布式运行架构。面向高时变性的空域运行环境,当空域条件对计划航路产生影响时,各业务模块实时更新并输出有效信息,向航空器机载端发布最优的实时改航路径,实现了环境自适应的航路规划能力,具体而言,本发明具有如下有益效果:
[0112]
本发明考虑了空域运行状态的时变性对航班飞行航路的影响,填补了当前航班改航策略在实施层面的不足。
[0113]
本发明在进行最优航路规划时考虑了改航航程、跨扇区个数,转弯角度,安全距离,燃油消耗等影响因素,提高了规划航路的可接受度。
[0114]
本发明提出的基于soa的分布式运行架构,能够帮助航空器在确保飞行安全的前提下,实时接收空域运行信息,减少策略生成及信息交互上的延迟性与重复性,实现有效减少燃油消耗和管制员工作负荷,有效提高空域利用率的目标。
[0115]
本发明提出的基于soa的环境自适应航路规划方法,能够提升航空器运行冲突解脱的敏捷性,提高动态空域运行条件下的飞行安全和航班准点率,提高航空器运行的智能化和经济性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。