1.本发明涉线巡线机器人技术领域,特别的为轨道升降式巡检机器人系统。
背景技术:
2.巡线机器人是以移动机器人作为载体,以可见光摄像机、红外热成像仪、其它检测仪器作为载荷系统,以机器视觉—电磁场—gps——gis的多场信息融合作为机器人自主移动与自主巡检的导航系统,以嵌入式计算机作为控制系统的软硬件开发平台。
3.现有的轨道升降式巡检机器人系统在使用的时候,是通过拟使用牵引变电所智能巡检装置代替人工进行日常巡视,从而减少了人工的工作内容,且监测数据和规律性优于人工,是很好的代替手段,然而传统的巡视系统需要人员实时观察,计算机无法直接对检测结果进行分析报警,只能通过人工观察发现异常后向上进行报告,且无法对巡检时记录的数据进行回放,由于需要与网络服务平台进行连接以进行实时观测,可能会导致外部病毒通过网络传输至系统内部导致系统瘫痪或故障。
技术实现要素:
4.本发明提供的发明目的在于提供轨道升降式巡检机器人系统,解决上述背景技术中的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:轨道升降式巡检机器人系统,包括:
6.吊挂式轨道,所述吊挂式轨道是对巡检机器人的巡视线路进行固定,同时对巡检机器人进行供电;
7.机器人控制系统,所述机器人控制系统是控制机器人沿着吊挂式轨道进行滑动巡检时保持电力供应,同时负责对机器人接受的信号进行转码、传输和储存的集中处理结构,使机器人能够将巡检时收集的数据传输至后台;
8.外部检测触发系统,所述外部检测触发系统用于对外部的待巡逻环境进行分类数据收集,通过将数据收集完成后传输至机器人控制系统进行集中处理;
9.病毒防火隔离系统,所述病毒防火隔离系统是对机器人控制系统所发出的待查验数据和操作指令数据进行解压分解检测,如果发现异常数据或与内部病毒库匹配则直接进行隔离报警;
10.网络服务平台,所述网络服务平台是对病毒防火隔离系统所接受的数据进行云端储存,从而避免机器人控制系统内部发生瘫痪时无法及时索取有效数据的问题;
11.监视平台,所述监视平台是通过私人客户端对网络服务平台云端储存的信息数据进行检索以及查看,同时可以通过管理员账号对网络服务平台进行指令发送,从而更改机器人控制系统内部的具体操作项目。
12.进一步的,所述机器人控制系统包括供电系统、交换机、nvr储存转发系统、机器人服务器、局域网接口和集中讯号处理系统。
13.进一步的,所述供电系统用于对机器人沿着吊挂式轨道的运行速度通过改变功率大小的方式对机器人的巡检速率进行调节,所述交换机用于为局域网接口和吊挂式轨道提供独享的电信号通路以减少干扰,所述机器人服务器是将集中讯号处理系统所接受的巡检勘察数据通过局域网接口进行讯号接收和格式更改,所述机器人服务器同时负责对局域网接口所接收的指令进行处理,所述nvr储存转发系统是通过局域网接口对机器人服务器所发送的储存信息进行保存,所述局域网接口是用于对病毒防火隔离系统所发出的指令进行接受和内部信息向外传输,所述集中讯号处理系统是用于外部检测触发系统传递的巡检信息进行编译发送至局域网接口的内部。
14.进一步的,所述供电系统与吊挂式轨道通过导线电性连接,所述交换机与吊挂式轨道通过局域网信号连接,所述局域网接口与交换机通过导线信号连接,所述集中讯号处理系统与局域网接口通过导线信号连接,所述机器人服务器与局域网接口通过导线信号连接,所述nvr储存转发系统与局域网接口通过导线信号连接。
15.采用上述技术方案:通过供电系统为吊挂式轨道进行供电处理,从而带动机器人沿着吊挂式轨道进行巡逻,此时烟雾传感器开始工作将巡检沿途的烟雾含量数据传输至烟雾讯号处理系统的内部,烟雾讯号处理系统对数据进行判断分析后判定为正常区间或异常区间的讯号发送至讯号发射系统的内部,光照强度检测仪对巡检区域内部的光线照明强度进行检测,随后将检测结果传输至光照检测处理系统的内部,随后通过光照检测处理系统对检测结果进行判断后发送至讯号发射系统的内部,通过电子温度湿度检测计对巡检过程中的空气温度和湿度进行检测,随后将检测结果发送至温度湿度检测处理系统的内部,通过温度湿度检测处理系统判断结果后发送至讯号发射系统的内部进行集中处理,通过在线激光粉尘检测仪对空气粉尘含量进行实时检测,通过粉尘监测讯号处理系统对检测结果进行实时判断并将判断结果发送至讯号发射系统的内部,通过讯号发射系统对烟雾讯号处理系统、光照检测处理系统、温度湿度检测处理系统和粉尘监测讯号处理系统所收集的讯息进行集中加密处理后,发送至集中讯号处理系统的内部,通过实时监测的方式达到了有效避免由于巡检结果报告不及时造成损失的目的。
16.进一步的,所述外部检测触发系统包括讯号发射系统、烟雾传感器、烟雾讯号处理系统、光照强度检测仪、光照检测处理系统、电子温度湿度检测计、温度湿度检测处理系统、在线激光粉尘检测仪和粉尘监测讯号处理系统。
17.进一步的,所述烟雾传感器用于对外界的烟雾浓度含量进行检测后传输至烟雾讯号处理系统从而判断是否达到临界值需要通过讯号发射系统进行报警讯号发射,所述光照强度检测仪用于对巡检区光照强度进行检测从而通过光照检测处理系统判断是否在合格区间内,所述电子温度湿度检测计用于对巡检区的空气温度和湿度进行检测,从而将检测结果传输至温度湿度检测处理系统内部从而判断是否需要通过讯号发射系统进行警报处理,所述在线激光粉尘检测仪用于在巡检过程中持续性检测粉尘浓度从而传输至粉尘监测讯号处理系统内部进行分析判断是否在合格区间内部。
18.进一步的,所述烟雾传感器与烟雾讯号处理系统通过导线电性连接,所述烟雾讯号处理系统与讯号发射系统通过导线信号连接,所述光照强度检测仪与光照检测处理系统通过导线电性连接,所述电子温度湿度检测计与温度湿度检测处理系统通过导线电性连接,所述温度湿度检测处理系统与讯号发射系统通过导线电性连接,所述在线激光粉尘检
测仪与粉尘监测讯号处理系统通过导线电性连接,所述粉尘监测讯号处理系统与讯号发射系统通过导线电性连接,所述讯号发射系统与集中讯号处理系统通过局域网信号连接。
19.采用上述技术方案:通过集中讯号处理系统接收到信息,进行解码处理后通过局域网接口发送至机器人服务器的内部,通过机器人服务器将数据分别储存至提前建立好的各个nvr储存转发系统中,当需要对检测数据进行调取时,通过管理员账号登录监视平台,通过监视平台沿着网络服务平台发送查找指令至局域网接口,在发送指令的过程中通过病毒防火隔离系统对指令内容进行检测,指令通过局域网接口进入机器人服务器的内部,通过机器人服务器对nvr储存转发系统的储存文件进行查找后,再次通过局域网接口、病毒防火隔离系统和网络服务平台传输至监视平台的内部,增加了往期数据查找功能和病毒隔离功能,达到了极大地减小被病毒入侵的可能性的同时可以通过网络云端检索数据的目的。
20.进一步的,所述吊挂式轨道与机器人控制系统电性连接,所述机器人控制系统与外部检测触发系统通过局域网信号连接,所述病毒防火隔离系统与机器人控制系统通过局域网信号连接,所述病毒防火隔离系统与网络服务平台通过局域网信号连接,所述网络服务平台与监视平台通过局域网信号连接。
21.本发明提供了轨道升降式巡检机器人系统。具备以下有益效果:
22.1、本发明,通过供电系统为吊挂式轨道进行供电处理,从而带动机器人沿着吊挂式轨道进行巡逻,此时烟雾传感器开始工作将巡检沿途的烟雾含量数据传输至烟雾讯号处理系统的内部,烟雾讯号处理系统对数据进行判断分析后判定为正常区间或异常区间的讯号发送至讯号发射系统的内部,光照强度检测仪对巡检区域内部的光线照明强度进行检测,随后将检测结果传输至光照检测处理系统的内部,随后通过光照检测处理系统对检测结果进行判断后发送至讯号发射系统的内部,通过电子温度湿度检测计对巡检过程中的空气温度和湿度进行检测,随后将检测结果发送至温度湿度检测处理系统的内部,通过温度湿度检测处理系统判断结果后发送至讯号发射系统的内部进行集中处理,通过在线激光粉尘检测仪对空气粉尘含量进行实时检测,通过粉尘监测讯号处理系统对检测结果进行实时判断并将判断结果发送至讯号发射系统的内部,通过讯号发射系统对烟雾讯号处理系统、光照检测处理系统、温度湿度检测处理系统和粉尘监测讯号处理系统所收集的讯息进行集中加密处理后,发送至集中讯号处理系统的内部,通过实时监测的方式达到了有效避免由于巡检结果报告不及时造成损失的目的。
23.2、本发明,通过集中讯号处理系统接收到信息,进行解码处理后通过局域网接口发送至机器人服务器的内部,通过机器人服务器将数据分别储存至提前建立好的各个nvr储存转发系统中,当需要对检测数据进行调取时,通过管理员账号登录监视平台,通过监视平台沿着网络服务平台发送查找指令至局域网接口,在发送指令的过程中通过病毒防火隔离系统对指令内容进行检测,指令通过局域网接口进入机器人服务器的内部,通过机器人服务器对nvr储存转发系统的储存文件进行查找后,再次通过局域网接口、病毒防火隔离系统和网络服务平台传输至监视平台的内部,增加了往期数据查找功能和病毒隔离功能,达到了极大地减小被病毒入侵的可能性的同时可以通过网络云端检索数据的目的。
附图说明:
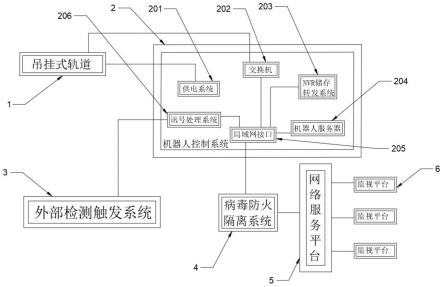
24.图1为本发明的系统图;
25.图2为本发明的触发模块系统图。
26.图例说明:
27.1、吊挂式轨道;2、机器人控制系统;201、供电系统;202、交换机;203、nvr储存转发系统;204、机器人服务器;205、局域网接口;206、集中讯号处理系统;3、外部检测触发系统;301、讯号发射系统;302、烟雾传感器;303、烟雾讯号处理系统;304、光照强度检测仪;305、光照检测处理系统;306、电子温度湿度检测计;307、温度湿度检测处理系统;308、在线激光粉尘检测仪;309、粉尘监测讯号处理系统;4、病毒防火隔离系统;5、网络服务平台;6、监视平台。
具体实施方式
28.如图1-2所示:轨道升降式巡检机器人系统,包括:
29.吊挂式轨道1,吊挂式轨道1是对巡检机器人的巡视线路进行固定,同时对巡检机器人进行供电;
30.机器人控制系统2,机器人控制系统2是控制机器人沿着吊挂式轨道1进行滑动巡检时保持电力供应,同时负责对机器人接受的信号进行转码、传输和储存的集中处理结构,使机器人能够将巡检时收集的数据传输至后台;
31.外部检测触发系统3,外部检测触发系统3用于对外部的待巡逻环境进行分类数据收集,通过将数据收集完成后传输至机器人控制系统2进行集中处理;
32.病毒防火隔离系统4,病毒防火隔离系统4是对机器人控制系统2所发出的待查验数据和操作指令数据进行解压分解检测,如果发现异常数据或与内部病毒库匹配则直接进行隔离报警;
33.网络服务平台5,网络服务平台5是对病毒防火隔离系统4所接受的数据进行云端储存,从而避免机器人控制系统2内部发生瘫痪时无法及时索取有效数据的问题;
34.监视平台6,监视平台6是通过私人客户端对网络服务平台5云端储存的信息数据进行检索以及查看,同时可以通过管理员账号对网络服务平台5进行指令发送,从而更改机器人控制系统2内部的具体操作项目。
35.机器人控制系统2包括供电系统201、交换机202、nvr储存转发系统203、机器人服务器204、局域网接口205和集中讯号处理系统206。
36.供电系统201用于对机器人沿着吊挂式轨道1的运行速度通过改变功率大小的方式对机器人的巡检速率进行调节,交换机202用于为局域网接口205和吊挂式轨道1提供独享的电信号通路以减少干扰,机器人服务器204是将集中讯号处理系统206所接受的巡检勘察数据通过局域网接口205进行讯号接收和格式更改,机器人服务器204同时负责对局域网接口205所接收的指令进行处理,nvr储存转发系统203是通过局域网接口205对机器人服务器204所发送的储存信息进行保存,局域网接口205是用于对病毒防火隔离系统4所发出的指令进行接受和内部信息向外传输,集中讯号处理系统206适用于外部检测触发系统3传递的巡检信息进行编译发送至局域网接口205的内部。
37.供电系统201与吊挂式轨道1通过导线电性连接,交换机202与吊挂式轨道1通过局域网信号连接,局域网接口205与交换机202通过导线信号连接,集中讯号处理系统206与局域网接口205通过导线信号连接,机器人服务器204与局域网接口205通过导线信号连接,
nvr储存转发系统203与局域网接口205通过导线信号连接。
38.外部检测触发系统3包括讯号发射系统301、烟雾传感器302、烟雾讯号处理系统303、光照强度检测仪304、光照检测处理系统305、电子温度湿度检测计306、温度湿度检测处理系统307、在线激光粉尘检测仪308和粉尘监测讯号处理系统309。
39.烟雾传感器302用于对外界的烟雾浓度含量进行检测后传输至烟雾讯号处理系统303从而判断是否达到临界值需要通过讯号发射系统301进行报警讯号发射,光照强度检测仪304用于对巡检区光照强度进行检测从而通过光照检测处理系统305判断是否在合格区间内,电子温度湿度检测计306用于对巡检区的空气温度和湿度进行检测,从而将检测结果传输至温度湿度检测处理系统307内部从而判断是否需要通过讯号发射系统301进行警报处理,在线激光粉尘检测仪308用于在巡检过程中持续性检测粉尘浓度从而传输至粉尘监测讯号处理系统309内部进行分析判断是否在合格区间内部。
40.烟雾传感器302与烟雾讯号处理系统303通过导线电性连接,烟雾讯号处理系统303与讯号发射系统301通过导线信号连接,光照强度检测仪304与光照检测处理系统305通过导线电性连接,电子温度湿度检测计306与温度湿度检测处理系统307通过导线电性连接,温度湿度检测处理系统307与讯号发射系统301通过导线电性连接,在线激光粉尘检测仪308与粉尘监测讯号处理系统309通过导线电性连接,粉尘监测讯号处理系统309与讯号发射系统301通过导线电性连接,讯号发射系统301与集中讯号处理系统206通过局域网信号连接。
41.吊挂式轨道1与机器人控制系统2电性连接,机器人控制系统2与外部检测触发系统3通过局域网信号连接,病毒防火隔离系统4与机器人控制系统2通过局域网信号连接,病毒防火隔离系统4与网络服务平台5通过局域网信号连接,网络服务平台5与监视平台6通过局域网信号连接。
42.工作原理:当需要进行巡检时,通过供电系统201为吊挂式轨道1进行供电处理,从而带动机器人沿着吊挂式轨道1进行巡逻,此时烟雾传感器302开始工作将巡检沿途的烟雾含量数据传输至烟雾讯号处理系统303的内部,烟雾讯号处理系统303对数据进行判断分析后判定为正常区间或异常区间的讯号发送至讯号发射系统301的内部,光照强度检测仪304对巡检区域内部的光线照明强度进行检测,随后将检测结果传输至光照检测处理系统305的内部,随后通过光照检测处理系统305对检测结果进行判断后发送至讯号发射系统301的内部,通过电子温度湿度检测计306对巡检过程中的空气温度和湿度进行检测,随后将检测结果发送至温度湿度检测处理系统307的内部,通过温度湿度检测处理系统307判断结果后发送至讯号发射系统301的内部进行集中处理,通过在线激光粉尘检测仪308对空气粉尘含量进行实时检测,通过粉尘监测讯号处理系统309对检测结果进行实时判断并将判断结果发送至讯号发射系统301的内部,通过讯号发射系统301对烟雾讯号处理系统303、光照检测处理系统305、温度湿度检测处理系统307和粉尘监测讯号处理系统309所收集的讯息进行集中加密处理后,发送至集中讯号处理系统206的内部,集中讯号处理系统206接收到信息,进行解码处理后通过局域网接口205发送至机器人服务器204的内部,通过机器人服务器204将数据分别储存至提前建立好的各个nvr储存转发系统203中,当需要对检测数据进行调取时,通过管理员账号登录监视平台6,通过监视平台6沿着网络服务平台5发送查找指令至局域网接口205,在发送指令的过程中通过病毒防火隔离系统4对指令内容进行检测,指
令通过局域网接口205进入机器人服务器204的内部,通过机器人服务器204对nvr储存转发系统203的储存文件进行查找后,再次通过局域网接口205、病毒防火隔离系统4和网络服务平台5传输至监视平台6的内部。
43.本发明的各部分可以用硬件、软件、固件或他们的组合来实现,在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现,例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
44.以上的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。