技术特征:
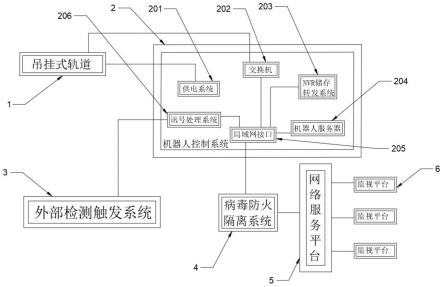
1.轨道升降式巡检机器人系统,其特征在于,包括:吊挂式轨道(1),所述吊挂式轨道(1)是对巡检机器人的巡视线路进行固定,同时对巡检机器人进行供电;机器人控制系统(2),所述机器人控制系统(2)是控制机器人沿着吊挂式轨道(1)进行滑动巡检时保持电力供应,同时负责对机器人接受的信号进行转码、传输和储存的集中处理结构,使机器人能够将巡检时收集的数据传输至后台;外部检测触发系统(3),所述外部检测触发系统(3)用于对外部的待巡逻环境进行分类数据收集,通过将数据收集完成后传输至机器人控制系统(2)进行集中处理;病毒防火隔离系统(4),所述病毒防火隔离系统(4)是对机器人控制系统(2)所发出的待查验数据和操作指令数据进行解压分解检测,如果发现异常数据或与内部病毒库匹配则直接进行隔离报警;网络服务平台(5),所述网络服务平台(5)是对病毒防火隔离系统(4)所接受的数据进行云端储存,从而避免机器人控制系统(2)内部发生瘫痪时无法及时索取有效数据的问题;监视平台(6),所述监视平台(6)是通过私人客户端对网络服务平台(5)云端储存的信息数据进行检索以及查看,同时可以通过管理员账号对网络服务平台(5)进行指令发送,从而更改机器人控制系统(2)内部的具体操作项目。2.根据权利要求1所述的轨道升降式巡检机器人系统,其特征在于:所述机器人控制系统(2)包括供电系统(201)、交换机(202)、nvr储存转发系统(203)、机器人服务器(204)、局域网接口(205)和集中讯号处理系统(206)。3.根据权利要求2所述的轨道升降式巡检机器人系统,其特征在于:所述供电系统(201)用于对机器人沿着吊挂式轨道(1)的运行速度通过改变功率大小的方式对机器人的巡检速率进行调节,所述交换机(202)用于为局域网接口(205)和吊挂式轨道(1)提供独享的电信号通路以减少干扰,所述机器人服务器(204)是将集中讯号处理系统(206)所接受的巡检勘察数据通过局域网接口(205)进行讯号接收和格式更改,所述机器人服务器(204)同时负责对局域网接口(205)所接收的指令进行处理,所述nvr储存转发系统(203)是通过局域网接口(205)对机器人服务器(204)所发送的储存信息进行保存,所述局域网接口(205)是用于对病毒防火隔离系统(4)所发出的指令进行接受和内部信息向外传输,所述集中讯号处理系统(206)是用于外部检测触发系统(3)传递的巡检信息进行编译发送至局域网接口(205)的内部。4.根据权利要求2所述的轨道升降式巡检机器人系统,其特征在于:所述供电系统(201)与吊挂式轨道(1)通过导线电性连接,所述交换机(202)与吊挂式轨道(1)通过局域网信号连接,所述局域网接口(205)与交换机(202)通过导线信号连接,所述集中讯号处理系统(206)与局域网接口(205)通过导线信号连接,所述机器人服务器(204)与局域网接口(205)通过导线信号连接,所述nvr储存转发系统(203)与局域网接口(205)通过导线信号连接。5.根据权利要求1所述的轨道升降式巡检机器人系统,其特征在于:所述外部检测触发系统(3)包括讯号发射系统(301)、烟雾传感器(302)、烟雾讯号处理系统(303)、光照强度检测仪(304)、光照检测处理系统(305)、电子温度湿度检测计(306)、温度湿度检测处理系统(307)、在线激光粉尘检测仪(308)和粉尘监测讯号处理系统(309)。
6.根据权利要求5所述的轨道升降式巡检机器人系统,其特征在于:所述烟雾传感器(302)用于对外界的烟雾浓度含量进行检测后传输至烟雾讯号处理系统(303)从而判断是否达到临界值需要通过讯号发射系统(301)进行报警讯号发射,所述光照强度检测仪(304)用于对巡检区光照强度进行检测从而通过光照检测处理系统(305)判断是否在合格区间内,所述电子温度湿度检测计(306)用于对巡检区的空气温度和湿度进行检测,从而将检测结果传输至温度湿度检测处理系统(307)内部从而判断是否需要通过讯号发射系统(301)进行警报处理,所述在线激光粉尘检测仪(308)用于在巡检过程中持续性检测粉尘浓度从而传输至粉尘监测讯号处理系统(309)内部进行分析判断是否在合格区间内部。7.根据权利要求6所述的轨道升降式巡检机器人系统,其特征在于:所述烟雾传感器(302)与烟雾讯号处理系统(303)通过导线电性连接,所述烟雾讯号处理系统(303)与讯号发射系统(301)通过导线信号连接,所述光照强度检测仪(304)与光照检测处理系统(305)通过导线电性连接,所述电子温度湿度检测计(306)与温度湿度检测处理系统(307)通过导线电性连接,所述温度湿度检测处理系统(307)与讯号发射系统(301)通过导线电性连接,所述在线激光粉尘检测仪(308)与粉尘监测讯号处理系统(309)通过导线电性连接,所述粉尘监测讯号处理系统(309)与讯号发射系统(301)通过导线电性连接,所述讯号发射系统(301)与集中讯号处理系统(206)通过局域网信号连接。8.根据权利要求1所述的轨道升降式巡检机器人系统,其特征在于:所述吊挂式轨道(1)与机器人控制系统(2)电性连接,所述机器人控制系统(2)与外部检测触发系统(3)通过局域网信号连接,所述病毒防火隔离系统(4)与机器人控制系统(2)通过局域网信号连接,所述病毒防火隔离系统(4)与网络服务平台(5)通过局域网信号连接,所述网络服务平台(5)与监视平台(6)通过局域网信号连接。
技术总结
本发明提供轨道升降式巡检机器人系统,涉及巡线机器人技术领域。该轨道升降式巡检机器人系统,吊挂式轨道,所述吊挂式轨道是对巡检机器人的巡视线路进行固定,同时对巡检机器人进行供电,通过供电系统为吊挂式轨道进行供电处理,从而带动机器人沿着吊挂式轨道进行巡逻,此时烟雾传感器开始工作将巡检沿途的烟雾含量数据传输至烟雾讯号处理系统的内部,通过讯号发射系统对烟雾讯号处理系统、光照检测处理系统、温度湿度检测处理系统和粉尘监测讯号处理系统所收集的讯息进行集中加密处理后,发送至集中讯号处理系统的内部,通过实时监测的方式达到了有效避免由于巡检结果报告不及时造成损失的目的。造成损失的目的。造成损失的目的。
技术研发人员:魏玉虎 张亮
受保护的技术使用者:中能智旷(北京)科技有限公司
技术研发日:2021.08.06
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。