1.本实用新型涉及一种机器人抓手自动锁模机构,属于注塑机技术领域。
背景技术:
2.近些年来,随着汽车工业及消费电子产品的高速发展,嵌件注塑技术应用日益广泛,目前市面上的自动化嵌件注塑技术,主要通过机器人抓手控制植入嵌件脱料,但是在嵌件脱料过程中会有产生一个反作用力作用到机器人抓手上,使机器人抓手发生偏移,从而影响注塑植入精度,导致注塑成品的合格率降低。
技术实现要素:
3.本实用新型的目的在于提供一种机器人抓手自动锁模机构,其可抵消反作用力,提高注塑植入精度。
4.为达到上述目的,本实用新型提供如下技术方案:一种机器人抓手自动锁模机构,插入模具的锁模槽内,用于机器人抓手植入嵌件脱料时锁紧模具,包括安装机器人抓手上的外壳、安装在所述外壳上的驱动装置和安装所述驱动装置上的锁定机构,所述锁定机构包括安装在所述驱动装置上的推杆和活动安装在所述推杆上的凸轮轴,所述推杆和凸轮轴容设在所述外壳内,所述凸轮轴一端伸出外壳且连接有锁模块,所述锁模块插入锁模槽内,所述推杆和凸轮轴之间部分套设连接,所述推杆和凸轮轴之间设置有传动机构,所述传动机构包括滑动配合的滚轮组件和滑槽,所述滚轮组件对称安装在推杆、凸轮轴之一上,所述滑槽对称阵列开设在推杆、凸轮轴另一上,所述滑槽为螺旋槽。
5.进一步地,所述驱动装置为电动气缸,所述电动气缸与机器人电连接,所述外壳上安装有固定块,所述电动气缸安装在所述固定块上,所述电动气缸的输出轴深入所述外壳内。
6.进一步地,所述推杆活动连接凸轮轴的一端为空心圆柱,所述滚轮组件对称安装在所述空心圆柱内壁上,所述凸轮轴容设在所述空心圆柱内。
7.进一步地,所述滚轮组件包括安装在所述推杆上的滚轮轴和安装在滚轮轴的端部的滚轮,所述滚轮活动安装在所述滑槽内。
8.进一步地,所述滑槽包括首端和末端,当所述滚轮的位置由所述首端移动到所述末端时,所述凸轮轴转动90
°
,当所述滚轮由所述末端移动到所述首端时,所述凸轮轴转动-90
°
。
9.进一步地,所述凸轮轴上套设有滚珠轴承,所述滚珠轴承安装在外壳内。
10.本实用新型的有益效果在于:本申请通过驱动装置驱动推杆移动,推杆带动凸轮轴转动以使锁模块转动,从而使锁模块卡接在模具的锁模槽内,以实现锁定机器人抓手和模具间的位置,相较于现有技术,本申请能锁定机器人抓手与模具的位置,防止机器人在脱料时抓手在反作用力下发生移动,提高了注塑植入精度,从而提高产品的合格率。
11.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技
术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
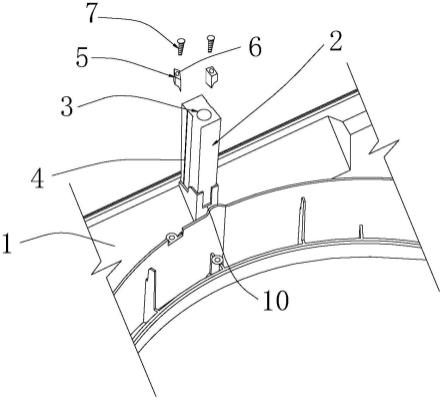
12.图1为本申请一较佳实施例所示的机器人抓手自动锁模机构的结构图。
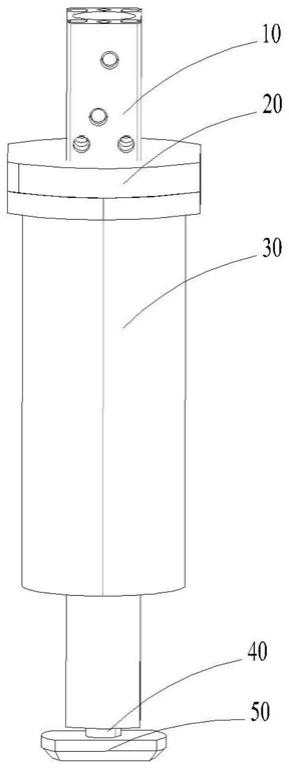
13.图2为图1中锁定机构的内部结构图。
14.图3为图2中推杆的结构放大图。
具体实施方式
15.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
16.请参照图1至图3,本申请一较佳实施例所示的一种机器人抓手自动锁模机构(下称锁模机构),插入模具(未图示)的锁模槽内,用于机器人(未图示)抓手植入嵌件脱料时锁紧模具,该锁模机构包括安装机器人抓手上的外壳30、安装在外壳30上的驱动装置10、安装驱动装置10上的锁定机构。锁定机构包括安装在驱动装置10上的推杆60和活动安装在推杆60上的凸轮轴40,推杆60和凸轮轴40容设在外壳30内,凸轮轴40一端伸出外壳30且连接有锁模块50,锁模块50插入锁模槽内。推杆60和凸轮轴40之间部分套设连接,推杆60和凸轮轴40之间设置有传动机构,传动机构包括滑动配合的滚轮组件80和滑槽41,滚轮组件80对称安装在推杆60、凸轮轴40之一上,滑槽41对称阵列开设在推杆60、凸轮轴40另一上,滑槽41为螺旋槽。
17.为了方便控制该锁模机构,在本实施例中,驱动装置10为电动气缸10,电动气缸10与机器人电连接,外壳30上安装有固定块20,电动气缸10安装在固定块20上,电动气缸10的输出轴深入外壳30内。
18.为了方便电动气缸10控制锁模块50转动,在本实施例中,推杆60的一端为空心圆柱,滚轮组件80对称安装在空心圆柱内壁上,凸轮轴40容设在空心圆柱内。
19.为了减小锁模机构工作时的摩擦力,在本实施例中,滚轮组件8080包括安装在推杆60上的滚轮轴82和安装在滚轮轴82的端部的滚轮81,滚轮81活动安装在滑槽40内。
20.为了提高锁模机构锁紧模具的稳定性,在本实施中,滑槽40包括首端和末端,当滚轮81的位置由首端移动到末端时,凸轮轴40转动90
°
,当滚轮81由末端移动到首端时,凸轮轴40转动-90
°
。具体的,凸轮轴仅在外壳内转动。
21.为了减小凸轮轴40与外壳30的摩擦力,在本实施例中,凸轮轴40上套设有滚珠轴承,滚珠轴承安装在外壳30内。
22.工作原理:机器人抓手将锁模块插入模具的锁模槽内,电动气缸推动推杆移动,推杆带动滚轮在滑槽内移动,从而带动凸轮轴转动,凸轮轴转动从而带动锁模块转动,当滚轮从滑槽一端移动到另一端时,锁模块转动90
°
以使锁模块卡设在锁模槽内,此时机器人进行嵌件脱料工作,当机器人嵌件脱料完成后,电动气缸驱动推杆返程移动,从而带动凸轮轴转动-90
°
以使锁模块松开模具,机器人抓手从模具上脱离。
23.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存
在矛盾,都应当认为是本说明书记载的范围。
24.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
技术特征:
1.一种机器人抓手自动锁模机构,其特征在于,插入模具的锁模槽内,用于机器人抓手植入嵌件脱料时锁紧模具,所述机器人抓手自动锁模机构包括安装机器人抓手上的外壳、安装在所述外壳上的驱动装置和安装所述驱动装置上的锁定机构,所述锁定机构包括安装在所述驱动装置上的推杆和活动安装在所述推杆上的凸轮轴,所述推杆和凸轮轴容设在所述外壳内,所述凸轮轴一端伸出外壳且连接有锁模块,所述锁模块插入锁模槽内,所述推杆和凸轮轴之间部分套设连接,所述推杆和凸轮轴之间设置有传动机构,所述传动机构包括滑动配合的滚轮组件和滑槽,所述滚轮组件对称安装在推杆、凸轮轴之一上,所述滑槽对称阵列开设在推杆、凸轮轴另一上,所述滑槽为螺旋槽。2.如权利要求1所述的机器人抓手自动锁模机构,其特征在于,所述驱动装置为电动气缸,所述电动气缸与机器人电连接,所述外壳上安装有固定块,所述电动气缸安装在所述固定块上,所述电动气缸的输出轴深入所述外壳内。3.如权利要求2所述的机器人抓手自动锁模机构,其特征在于,所述推杆活动连接凸轮轴的一端为空心圆柱,所述滚轮组件对称安装在所述空心圆柱内壁上,所述凸轮轴容设在所述空心圆柱内。4.如权利要求3所述的机器人抓手自动锁模机构,其特征在于,所述滚轮组件包括安装在所述推杆上的滚轮轴和安装在滚轮轴的端部的滚轮,所述滚轮活动安装在所述滑槽内。5.如权利要求4所述的机器人抓手自动锁模机构,其特征在于,所述滑槽包括首端和末端,当所述滚轮的位置由所述首端移动到所述末端时,所述凸轮轴转动90
°
,当所述滚轮由所述末端移动到所述首端时,所述凸轮轴转动-90
°
。6.如权利要求1所述的机器人抓手自动锁模机构,其特征在于,所述凸轮轴上套设有滚珠轴承,所述滚珠轴承安装在外壳内。
技术总结
本申请涉及一种机器人抓手自动锁模机构,通过驱动装置驱动推杆移动,推杆带动凸轮轴转动以使锁模块转动,从而使锁模块卡接在模具的锁模槽内,以实现锁定机器人抓手和模具间的位置,相较于现有技术,本申请能锁定机器人抓手与模具的位置,防止机器人在脱料时抓手在反作用力下发生移动,提高了注塑植入精度,从而提高产品的合格率。高产品的合格率。高产品的合格率。
技术研发人员:汤仁兴 沈秋
受保护的技术使用者:苏州弗朗格智能设备有限公司
技术研发日:2022.10.25
技术公布日:2023/2/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。