技术特征:
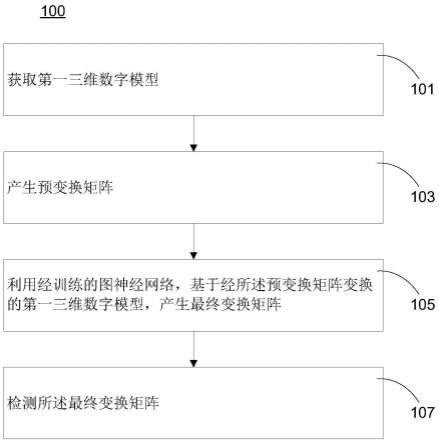
1.一种计算机执行的牙齿三维数字模型的局部坐标系的设定方法,包括:获取世界坐标系下的表示第一牙齿的第一三维数字模型;对所述第一三维数字模型的进行特征提取;利用经训练的深度学习图神经网络,基于所述提取的特征,产生总变换矩阵;以及基于所述世界坐标系和所述总变换矩阵建立所述局部坐标系。2.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,它还包括:产生预变换矩阵,并将其应用于所述世界坐标系下的第一三维数字模型,得到经预变换的第一三维数字模型,其中,所述特征提取是对所述经预变换的第一三维数字模型进行;所述经训练的深度学习图神经网络,基于所述提取的特征,产生最终变换矩阵;以及将所述预变换矩阵和所述最终变换矩阵结合得到所述总变换矩阵,其中,所述最终变换矩阵所对应的变换小于所述总变换矩阵。3.如权利要求2所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,所述预变换矩阵可以基于以下至少之一产生:(一)所述第一三维数字模型局部坐标系的原点;以及(二)多个用于训练所述深度学习图神经网络的样本的总变换矩阵的平均值。4.如权利要求3所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,所述第一三维数字模型局部坐标系的原点可以是以下之一:所述第一三维数字模型的几何中心,以及所述第一三维数字模型的牙洞线中心。5.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,所述深度学习图神经网络的输出包括9维向量,其中,6维表示旋转向量,3维表示平移向量。6.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,所述特征包括:面片中心点、面片法向量以及面片各顶点到中心点的向量。7.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,训练所述深度学习图神经网络所采用的损失函数包括以下之一:预测的总变换矩阵与真值总变换矩阵之差;预测的总变换矩阵的旋转分量与真值总变换矩阵的旋转分量之差;预测的总变换矩阵的平移分量与真值总变换矩阵的平移分量之差;以及经预测的总变换矩阵和真值总变换矩阵变换的所述第一三维数字模型之差。8.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,它还包括:通过引入扰动,基于所述第一三维数字模型产生多个输入;对比所述多个输入对应的局部坐标系设定结果;以及若所述对比的结果大于预定值,则发出警报。9.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,它还包括:所述深度学习图神经网络包括dropout层,所述深度学习图神经网络对于所述第一三维数字模型产生多个局部坐标系设定结果;对比所述多个局部坐标系设定结果;以及
若所述对比的结果大于预定值,则发出警报。10.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,所述深度学习图神经网络是针对牙列中一颗预定的牙齿。11.如权利要求1所述的计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其特征在于,所述深度学习图神经网络是动态图卷积神经网络。
技术总结
本申请的一方面提供了一种计算机执行的牙齿三维数字模型的局部坐标系的设定方法,其包括:获取世界坐标系下的表示第一牙齿的第一三维数字模型;对所述第一三维数字模型的进行特征提取;利用经训练的深度学习图神经网络,基于所述提取的特征,产生总变换矩阵;以及基于所述世界坐标系和所述总变换矩阵建立所述局部坐标系。局部坐标系。局部坐标系。
技术研发人员:郝晋
受保护的技术使用者:宁波深莱医疗科技有限公司
技术研发日:2021.08.11
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。