1.本公开涉及一种用于在车辆车轮的车轮竖直力不同的情况下控制/调节至少一个车辆车轮的车轮行为的系统。本公开还涉及一种用于在车辆车轮的车轮竖直力不同的情况下控制/调节至少一个车辆车轮的车轮行为的方法。
背景技术:
2.用于车辆的防抱死制动系统(abs)在现有技术中是已知的。防抱死制动系统防止车辆车轮在制动操作期间抱死,以便维持车辆的可操纵性。由此可以避免车辆在制动操作期间打滑。对于越野车辆,还已知防抱死制动系统的特殊附加功能,其也被称为“越野abs”。在“越野abs”中,一个或多个车辆车轮可以间歇地被阻挡,特别是在松软的地面上,以便维持越野车辆的可操纵性。
技术实现要素:
3.本公开的目的是进一步改进现有的防抱死制动系统。
4.该目的利用具有如下特征的用于控制/调节至少一个车辆车轮的车轮行为的系统来实现。
5.在其它方面中指出了另外的实施方式。
6.用于控制/调节至少一个车辆车轮的车轮行为的用于车辆的系统包括至少一个单元,该至少一个单元用于确定安装在车辆的同一车轴上的至少两个车辆车轮的车轮竖直力。该系统适于针对至少两个车辆车轮中的每一个车辆确定指示车轮行为的至少一个参数。该系统适于基于由用于确定至少两个车辆车轮的车轮竖直力的单元确定的车轮竖直力,至少确定具有较高车轮竖直力的车辆车轮。该系统还适于将针对具有较高车轮竖直力的车辆车轮确定的指示车轮行为的至少一个参数设定为用于具有较低车轮竖直力的车辆车轮的目标值。
7.借助于该系统,在车辆车轮的车轮竖直力不同的情况下,也可以利用具有较低车轮竖直力的一个或多个车辆车轮实现有助于使车辆减速的制动动作。因此,借助于该系统,可以避免由驾驶员感知为制动不足(underbraking)的状态,在该状态下尽管驾驶员和/或驾驶员辅助系统进行了足够的制动操作,但仍实现不足的制动动作。特别是在斜坡和/或越野的情况下,可以利用该系统实现受控的制动操作。该受控的制动操作根据驾驶员经由制动踏板进行的制动操作或根据驾驶员辅助系统进行的制动操作来执行,使得消除了制动不足。
8.该系统可以适于基于指示具有较高车轮竖直力的车辆车轮的车轮行为的至少一个参数来确定用于具有较低车轮竖直力的至少一个车辆车轮的目标车轮扭矩。该系统可以适于将该目标车轮扭矩设定为用于具有较低车轮竖直力的至少一个车辆车轮的目标值。
9.该系统可以适于将具有较高车轮竖直力的车辆车轮的车轮速度(wheel speed,车轮轮速或车轮转速)确定为指示车轮行为的至少一个参数。由系统针对具有较高车轮竖直
力的车辆车轮确定的该车轮速度可以由系统设定为用于具有较低车轮竖直力的至少一个车辆车轮的目标值。
10.在确定了具有较高车轮竖直力的车辆车轮的和/或具有较低车轮竖直力的车辆车轮的车轮行为的改变的情况下,该系统可以适于结束将指示具有较高车轮竖直力的车辆车轮的车轮行为的参数设定为用于具有较低车轮竖直力的车辆车轮的目标值。
11.用于确定车轮竖直力的单元可以适于确定每个车辆车轮的车轮竖直力。为此目的,用于确定车轮竖直力的单元可以连接到或者能够连接到车辆的阻尼系统的至少两个弹簧行程传感器。弹簧行程传感器可以监测车辆车轮的减震器,例如,以便确定减震器的弹簧行程。用于确定车轮竖直力的单元也可以连接到阻尼系统的四个弹簧行程传感器。
12.该系统还可以适于基于由用于确定车轮竖直力的单元确定的车辆车轮的车轮竖直力来确定车辆车轮的铰接(articulation)状态。如果车辆的车辆车轮相对于车辆侧面和/或前轴和后轴具有不同的车轮竖直力,则会存在铰接状态。例如,如果左前车辆车轮和右后车辆车轮具有高的车轮竖直力,而右前车辆车轮和左后车辆车轮具有低的车轮竖直力,则铰接状态存在。换句话说,在铰接状态下,在车轮对角线上的车辆车轮处可以存在不同的车轮竖直力。在铰接状态下,车辆车轮例如由于不平坦的地面而可以具有不同的高度水平。车辆车轮的高度水平可以例如反映在与车辆车轮相关联的减震器的弹簧行程中。例如,如果左前车辆车轮和右后车辆车轮位于地面的隆起上(也就是说,这些车辆车轮的阻尼系统或减震器可以被压缩),而右前车辆车轮和左后车辆车轮位于地面的凹陷中(也就是说,这些车辆车轮的阻尼系统或减震器不被压缩或者被压缩得比其它两个车辆车轮的阻尼系统少),则相对于地面可以存在铰接。
13.该系统可以适于将指示具有较高车轮竖直力的车辆车轮的车轮行为的参数设定为用于在同一车轴上的具有较低车轮竖直力的车辆车轮的目标值。例如,可以将前车轴上的具有较高车轮竖直力的车辆车轮的车轮速度设定为用于前车轴上的具有较低车轮竖直力的车辆车轮的车轮速度的目标值。针对具有较高车轮竖直力的车辆车轮确定的参数因此可以“复制”到同一车轴上的具有较低车轮竖直力的车轮。
14.该系统可以适于至少确定至少两个车辆车轮的车轮速度。该系统还可以适于确定四个或更多个车辆车轮的车轮速度。利用所确定的车轮速度,可以确定每个车辆车轮的车轮速度以及每个车辆车轮的车轮加速度。此外,每个车辆车轮的车轮滑移也可以基于所确定的车轮速度来确定。车轮速度可以是指示车轮行为的参数,因此也可以被设定为用于具有较低车轮竖直力的车辆车轮的目标值。车轮加速度也是如此。
15.该系统可以适于确定车辆的倾斜度。为此目的,该系统例如可以连接到或能够连接到倾斜传感器。基于车辆的倾斜度,该系统可以确定车辆所处的区段的坡度。基于车辆的倾斜度,系统还可以确定车辆是上坡行驶还是下坡行驶。
16.该系统还可以适于确定车辆在其上移动的地面的性质。该系统例如可以确定车辆是在松软的地面上还是在诸如公路的坚实的地面上。
17.该系统可以连接到车辆的制动系统或防抱死制动系统。由此,经由所讨论的车辆车轮处的制动器,可以根据目标值调节/控制具有较低车轮竖直力的至少一个车辆车轮的车轮行为。
18.在开始提到的目的还通过如下所述的用于控制/调节至少一个车辆车轮的车轮行
为的方法来实现。
19.用于控制/调节至少一个车辆车轮的车轮行为的方法包括以下步骤:
20.确定安装在车辆的同一车轴上的至少两个车辆车轮的车轮竖直力;
21.确定指示至少两个车辆车轮中的每个车辆车轮的车轮行为的至少一个参数;
22.基于所确定的至少两个车辆车轮的车轮竖直力来至少确定具有较高车轮竖直力的车辆车轮;以及
23.将针对具有较高车轮竖直力的车辆车轮确定的至少一个参数设定为用于具有较低车轮竖直力的车辆车轮的目标值。
24.该方法可以基于指示具有较高车轮竖直力的车辆车轮的车轮行为的至少一个参数来确定具有较低车轮竖直力的至少一个车辆车轮的目标车轮扭矩。该方法可以将目标车轮扭矩设定为用于具有较低车轮竖直力的至少一个车辆车轮的目标值。
25.该方法可以将具有较高车轮竖直力的车辆车轮的车轮速度确定为指示车辆车轮的车轮行为的至少一个参数。此外,该方法可以将该车轮速度设定为用于具有较低车轮竖直力的至少一个车辆车轮的目标值。
26.在基于具有较高车轮竖直力的车辆车轮的或具有较低车轮竖直力的车辆车轮的车轮行为确定车轮行为改变的情况下,该方法可以结束将指示具有较高车轮竖直力的车辆车轮的车轮行为的参数设定为用于具有较低车轮竖直力的车辆车轮的目标值。
27.该方法可以基于由用于确定车轮竖直力的单元确定的车辆车轮的车轮竖直力来确定车辆车轮的铰接状态。该方法可以将指示具有较高车轮竖直力的车辆车轮的车轮行为的参数设定为用于在同一车轴上的具有较低车轮竖直力的车辆车轮的目标值。
28.该方法可以至少针对至少两个车辆车轮中的每一个确定车轮速度。该方法可以确定车辆的倾斜度。该方法可以确定车辆在其上移动的地面的性质。
附图说明
29.下面将参照附图对示例性实施方式进行说明,其中:
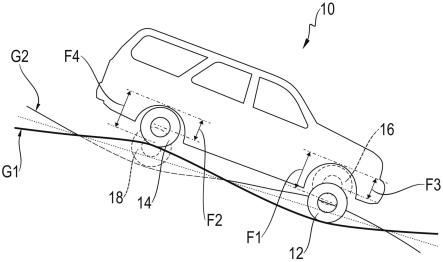
30.图1和图2是用于解释车辆车轮的铰接状态的图,
31.图3是基于图1的图,用于解释用于控制/调节至少一个车辆车轮的车轮行为的系统和方法的功能;以及
32.图4是用于控制/调节至少一个车辆车轮的车轮行为的系统的示意图。
具体实施方式
33.图1示出了车辆10。车辆10具有四个车辆车轮12、14、16和18。可以相对于两个车轮对角线r1和r2建立铰接状态。当右前车辆车轮12和左后车辆车轮18(车轮对角线r1)大致位于一个高度水平,而左前车辆车轮16和右后车辆车轮14(车轮对角线r2)位于不同的高度水平时,建立铰接状态。例如,当右前车辆车轮12和左后车辆车轮18与车辆车轮14和16相比位于地面的凹陷中时,就发生这种状态。当左前车辆车轮16和右后车辆车轮14位于地面的隆起上时,也可以发生铰接。这种状态在图2中示出。
34.图2示意性地示出了用于右车辆车轮12和14的地面轮廓g1和用于左车辆车轮16和18的地面轮廓g2。右前车辆车轮12处于凹陷中,右后车辆车轮14处于隆起上。这一点从右车
辆车轮12和14的阻尼系统(图中示出)的标记弹簧行程f1、f2中也是明显的。右前车辆车轮12的弹簧行程f1相对较大。用于右后车辆车轮的弹簧行程f2小于弹簧行程f1,即,右后车辆车轮14的减震器由于地面的隆起而处于压缩状态。
35.车辆左侧的车辆车轮16和18的减震器处于不同的压缩状态。左前车辆车轮16处于隆起上,而左后车辆车轮18处于凹陷中。因此,与右后车辆车轮14类似地,左前车辆车轮16的减震器的弹簧行程f3小于左后车辆车轮18的减震器的弹簧行程f4。
36.车辆10下坡行驶在斜坡上。由于具有上述隆起和凹陷的地面轮廓g1、g2,车辆车轮12、14、16和18具有不同的车轮竖直力。这从车辆车轮12、14、16和18的减震器的不同弹簧行程f1、f2、f3和f4也是显而易见的。右前车辆车轮12和左后车辆车轮18具有低车轮竖直力,因为车辆车轮12和18处于凹陷中。左前车辆车轮16和右后车辆车轮14具有比车辆车轮12和18的车轮竖直力大的车轮竖直力。车辆车轮12、14、16和18的车轮竖直力可以借助于各个车辆车轮12、14、16和18的车轮悬架或阻尼系统上的弹簧行程传感器来确定。
37.由于车辆车轮12、14、16和18的不同的车轮竖直力,可以仅针对车辆车轮12、14、16和18规定非常不同的目标制动扭矩。由于图2所示的下坡行驶,由于下坡坡度力,高加速力作用于车辆。在这种状态下,可能发生的是,在具有较低车轮竖直力的车辆车轮12和18处的制动器的制动压力几乎完全减小,以便防止车辆车轮12和18抱死。如果在这种状态下发生过渡到没有相反的凹陷和隆起的平坦斜坡,则必须首先在车辆车轮12和18的制动器处再次建立足够的制动压力,以便车辆车轮12和18能够有助于使车辆减速。由于建立制动压力所需的时间,甚至在图2所示的下坡行驶期间也可能发生车辆速度的增加,驾驶员将其感知为制动不足。
38.这可以通过根据本公开的系统和方法来防止,因为针对具有高车轮竖直力的车辆车轮14和16确定指示车轮行为的参数,并且该参数被设定为用于具有较低车轮竖直力的车辆车轮12和18的目标值。在图2所示的状态下,可以借助于根据本公开的系统和方法来特别地调节/控制具有低车轮竖直力的车辆车轮12和18的车轮行为,使得可以防止制动不足并且可以实现受控的制动操作。
39.为此目的,确定车辆车轮12、14、16和18的车轮竖直力。基于所确定的车辆车轮12、14、16和18的车轮竖直力,系统能够确定铰接状态是否存在。如果图2中以示例方式示出的铰接状态存在,则车辆车轮14和16具有比车辆车轮12和18更高的车轮竖直力。至少针对具有较高车轮竖直力的车辆车轮14和16,确定指示所讨论的车辆车轮14和16的车轮行为的参数。指示具有较高车轮竖直力的车辆车轮14和16的车轮行为的该参数可以是例如具有较高车轮竖直力的车辆车轮14和16的车轮速度。作为具有较高车轮竖直力的车辆车轮的左前车辆车轮16的车轮速度被设定为用于具有较低车轮竖直力的右前车辆车轮12的车轮速度的目标值。具有高车轮竖直力的右后车辆车轮14的车轮速度同样被设定为用于左后车辆车轮18的车轮速度的目标值。从而可以防止具有较低车轮竖直力的车辆车轮12和18的制动器处存在的制动压力被降低,以便防止车轮的抱死。
40.图3是根据图1的示意图,其中描绘了箭头p1和p2。箭头p1和p2旨在示出根据本公开的系统和方法的功能。具有高车轮竖直力的车辆车轮是右后车辆车轮14和左前车辆车轮16(见图2)。至少针对车辆车轮14和16确定指示车轮行为的参数。该参数可以是例如车辆车轮14和16的车轮速度。如箭头p1所示,前轴a1上的车辆车轮16的车轮速度被设定为用于同
样位于前轴a1上的车辆车轮12的车轮速度的目标值。根据箭头p2,后轴a2上的车辆车轮14的车轮速度被设定为用于后轴a2上的车辆车轮18的车轮速度的目标值。具有高车轮竖直力的车轮14和16的车轮速度或确定的参数被设定为用于具有较低车轮竖直力的车辆车轮12和18的目标值,所述车辆车轮12和18与车辆车轮14和16位于同一车轴a1、a2上。根据本公开的系统可以连接到制动系统和/或防抱死制动系统,以便经由车辆车轮12和18处的制动器根据设定的目标值调节/控制具有较低车轮竖直力的车辆车轮12和18的车轮行为。
41.如果系统确定具有较低车轮竖直力的车辆车轮12、18中的一个车轮的车轮滑移低于在同一车轴a1、a2上的具有较高车轮竖直力的相应车轮14、16的车轮滑移,则结束将指示具有较高车轮竖直力的车辆车轮14、16的车轮行为的参数设定为用于具有较低车轮竖直力的车辆车轮12、18的目标值。例如,当车辆车轮12、14、16和18的铰接状态不再存在和/或具有较低车轮竖直力的车辆车轮12、18中的一个车辆车轮下方的地面具有比具有较高车轮竖直力的车轮14、16下方的地面更高的摩擦系数时,情况就是如此。
42.图4示意性地示出了系统110、用于确定车轮竖直力的单元120以及制动系统/防抱死制动系统140。系统110、单元120和制动系统/防抱死制动系统140可以包括在车辆(未示出)中。系统110适于确定指示车辆车轮12、14、16和18的车轮行为的参数。系统110可以例如基于相应车轮12、14、16和18的车轮速度来确定指示每个车辆车轮12、14、16、18的车轮行为的参数。为此目的,系统110可以连接到车轮12、14、16、18处的车轮速度传感器。系统110连接到用于确定车轮竖直力的单元120。单元120可以连接到位于车辆车轮12、14、16、18的车轮悬架或减震器处的弹簧行程传感器130。每个车轮12、14、16、18的车轮竖直力可以通过由弹簧行程传感器130获取的车辆车轮12、14、16、18的车轮悬架或减震器的弹簧行程来确定。对于根据本公开的系统和方法,基于所确定的弹簧行程,足以确定在车辆车轮14和16处存在比在车辆车轮12和18处更高的车轮竖直力(见图2)。本公开的方法或系统不一定需要对车轮竖直力进行定量确定。
43.系统110可以连接到制动系统/防抱死制动系统140,以便能够根据所确定的目标值经由车辆车轮12和18的制动器来调节/控制具有较低车轮竖直力的车辆车轮12和18的车轮行为。系统110可以是车辆的制动系统或防抱死制动系统140的一部分。
44.利用根据本公开的系统和方法,可以利用车辆车轮的不同的车轮竖直力来实现可以有助于也利用车辆车轮或具有较低车轮竖直力的车辆车轮使车辆减速的制动动作。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。