技术特征:
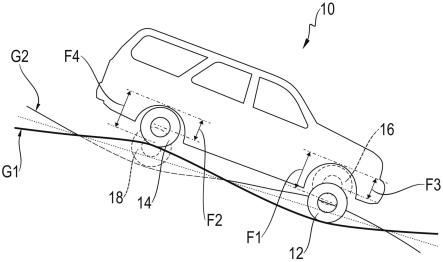
1.一种用于控制/调节至少一个车辆车轮(12、14、16、18)的车轮行为的用于车辆的系统(110),所述系统具有至少一个单元(120),所述至少一个单元用于确定安装在所述车辆的同一车轴上的至少两个车辆车轮(12、14、16、18)的车轮竖直力,其中,所述系统(110)适于针对所述至少两个车辆车轮(12、14、16、18)中的每个车辆车轮确定指示所述车轮行为的至少一个参数,其中,所述系统(110)适于基于由用于确定所述至少两个车辆车轮(12、14、16、18)的所述车轮竖直力的所述单元(120)确定的所述车轮竖直力,至少确定具有较高车轮竖直力的所述车辆车轮(14、16),并且其中,所述系统(110)还适于将针对具有所述较高车轮竖直力的所述至少一个车辆车轮(12、14、16、18)确定的指示所述车轮行为的所述至少一个参数设定为用于具有较低车轮竖直力的所述至少一个车辆车轮(12、14、16、18)的目标值。2.根据权利要求1所述的系统(110),其中,所述系统(110)适于基于指示具有所述较高车轮竖直力的所述车辆车轮(14、16)的所述车轮行为的所述至少一个参数来确定目标车轮扭矩,并且将该目标车轮扭矩设定为用于具有所述较低车轮竖直力的所述至少一个车辆车轮(12、18)的所述目标值。3.根据权利要求1或2所述的系统(110),其中,所述系统(110)适于将具有所述较高车轮竖直力的所述车辆车轮(14、16)的车轮速度确定为指示所述车轮行为的至少一个参数,并且将该车轮速度设定为用于具有所述较低车轮竖直力的所述至少一个车辆车轮(12、18)的所述目标值。4.根据权利要求1至3中任一项所述的系统(110),其中,所述系统(110)适于在确定了具有较高车轮竖直力的所述车辆车轮(14、16)的改变和/或具有所述较低车轮竖直力的所述车辆车轮(12、18)的改变的情况下,结束将指示具有较高车轮竖直力的所述车辆车轮(14、16)的所述车轮行为的所述参数设定为用于具有较低车轮竖直力的所述车辆车轮(12、18)的所述目标值。5.根据权利要求1至4中任一项所述的系统(110),其中,用于确定所述车轮竖直力的所述单元(120)适于确定所有所述车辆车轮(12、14、16、18)的所述车轮竖直力。6.根据权利要求5所述的系统(110),其中,所述系统(110)适于基于由用于确定所述车轮竖直力的所述单元(120)确定的所述车辆车轮(12、14、16、18)的所述车轮竖直力来识别所述车辆车轮(12、14、16、18)的铰接状态。7.根据权利要求1至6中任一项所述的系统(110),其中,所述系统(110)适于将指示具有所述较高车轮竖直力的所述车辆车轮(14、16)的所述车轮行为的参数设定为用于在同一车轴(a1、a2)上的具有所述较低车轮竖直力的所述车辆车轮(12、18)的所述目标值。8.根据权利要求1至7中任一项所述的系统(110),其中,用于确定所述车轮竖直力的所述单元(120)连接到或者能够连接到所述车辆(10)的阻尼系统的至少两个弹簧行程传感器(130)。9.根据权利要求1至8中任一项所述的系统(110),
其中,所述系统(110)适于至少确定所述至少两个车辆车轮(12、14、16、18)中的每个车辆车轮的所述车轮速度。10.根据权利要求1至9中任一项所述的系统(110),其中,所述系统(110)适于确定所述车辆的倾斜度。11.根据权利要求1至10中任一项所述的系统(110),其中,所述系统(110)适于确定所述车辆(10)在其上移动的地面的性质。12.根据权利要求1至11中任一项所述的系统(110),其中,所述系统(110)连接到或者能够连接到车辆(10)的制动系统和/或防抱死制动系统(140),以便经由所讨论的所述车辆车轮(12、18)处的制动器根据所述目标值来调节/控制具有所述较低车轮竖直力的所述至少一个车辆车轮(12、18)的所述车轮行为。13.一种用于控制/调节至少一个车辆车轮的车轮行为的方法,其中,所述方法包括以下步骤:确定安装在所述车辆(10)的同一车轴上的至少两个车辆车轮(12、14、16、18)的车轮竖直力;确定指示所述至少两个车辆车轮(12、14、16、18)中的每个车辆车轮的所述车轮行为的至少一个参数;基于所确定的所述至少两个车辆车轮(12、14、16、18)的所述车轮竖直力来至少确定具有较高车轮竖直力的所述车辆车轮(14、16);以及将针对具有所述较高车轮竖直力的所述至少一个车辆车轮(14、16)确定的所述至少一个参数设定为用于具有较低车轮竖直力的所述至少一个车辆车轮(12、18)的目标值。14.根据权利要求13所述的方法,其中,所述方法还包括以下步骤:基于指示具有所述较高车轮竖直力的所述车辆车轮(14、16)的所述车轮行为的所述至少一个参数来确定具有较低车轮竖直力的所述至少一个车辆车轮(12、18)的目标车轮扭矩;以及将该目标车轮扭矩设定为用于具有所述较低车轮竖直力的所述至少一个车辆车轮(12、18)的所述目标值。15.根据权利要求13或14所述的方法,其中,所述方法还包括以下步骤:将具有所述较高车轮竖直力的所述车辆车轮(14、16)的车轮速度确定为指示具有所述较低车轮竖直力的所述车辆车轮(12、18)的所述车轮行为的至少一个参数;以及将该车轮速度设定为用于具有所述较低车轮竖直力的所述至少一个车辆车轮(12、18)的所述目标值。16.根据权利要求13至15中任一项所述的方法,其中,所述方法还包括以下步骤:在确定了具有较高车轮竖直力的所述车辆车轮(14、16)的改变和/或具有所述较低车轮竖直力的所述车辆车轮(12、18)的改变的情况下,结束将指示具有较高车轮竖直力的所述车辆车轮(14、16)的所述车轮行为的所述参数设定为用于具有所述较低车轮竖直力的所述车辆车轮(12、18)的所述目标值。
17.根据权利要求13至16中任一项所述的方法,其中,所述方法还包括以下步骤:基于由用于确定所述车轮竖直力的单元(120)确定的所述车辆车轮(12、14、16、18)的所述车轮竖直力来确定所述车辆车轮(12、14、16、18)的铰接状态。18.根据权利要求13至17中任一项所述的方法,其中,所述方法还包括以下步骤:将指示具有所述较高车轮竖直力的所述车辆车轮(14、16)的所述车轮行为的所述参数设定为用于在同一车轴(a1、a2)上的具有所述较低车轮竖直力的所述车辆车轮(12、18)的所述目标值。19.根据权利要求13至18中任一项所述的方法,其中,所述方法还包括以下步骤:至少针对所述至少两个车辆车轮(12、14、16、18)中的每个车辆车轮确定所述车轮速度。20.根据权利要求13至19中任一项所述的方法,其中,所述方法还包括以下步骤:确定所述车辆(10)的倾斜度。21.根据权利要求13至20中任一项所述的方法,其中,所述方法还包括以下步骤:确定所述车辆(10)在其上移动的地面的性质。22.根据权利要求13至21中任一项所述的方法,其中,所述系统(110)连接到或者能够连接到车辆(10)的制动系统和/或防抱死制动系统(140),以便能够经由所讨论的所述车辆车轮(12、18)处的制动器根据所述目标值来调节/控制具有所述较低车轮竖直力的所述至少一个车辆车轮(12、18)的所述车轮行为。
技术总结
本发明涉及用于控制/调节至少一个车辆车轮的车轮行为的系统和方法。用于控制/调节至少一个车辆车轮的车轮行为的用于车辆的系统包括用于确定安装在车辆的同一车轴上的至少两个车辆车轮的车轮竖直力的至少一个单元。该系统适于针对至少两个车辆车轮中的每一个车辆车轮确定指示车轮行为的至少一个参数。该系统还适于基于由用于确定至少两个车辆车轮的车轮竖直力的单元确定的车轮竖直力,至少确定具有较高车轮竖直力的车辆车轮。该系统还适于将针对具有较高车轮竖直力的至少一个车辆车轮确定的指示车轮行为的至少一个参数设定为用于具有较低车轮竖直力的车辆车轮的目标值。用于具有较低车轮竖直力的车辆车轮的目标值。用于具有较低车轮竖直力的车辆车轮的目标值。
技术研发人员:A
受保护的技术使用者:采埃孚主动安全股份有限公司
技术研发日:2022.07.22
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。